基于实孔径成像的水下高速小目标末弹道测量方法
2019-07-25张思宇何心怡
张思宇 何心怡 王 磊 祝 琳
(1 海军研究院 北京 100161)
(2 中国科学院声学研究所 北京 100190)
0 引言
随着水中兵器日益朝着智能化、高机动、大威力的方向发展,精确测量其水下运动轨迹对武器装备试验定型、性能评估和战法训法制定具有越来越重要的参考意义。水中兵器弹道测量系统主要分为内测系统和外测系统[1−13]。内测系统主要通过目标安装的惯性装置测量并记录航行过程中的加速度、角度和深度等运动参数,进而解算出目标的速度、姿态和轨迹信息。外测系统主要有长基线定位系统、短基线定位系统和超短基线定位系统,通过水下弹道测量系统和目标安装的合作声信标测量目标斜距和方向,实现目标定位和轨迹测量。但是,在陌生水域测量高速小目标的末弹道,由于小目标无法安装合作声信标且没有水下弹道测量系统配合,不能测得目标斜距,故传统方法难以胜任此类情形的末弹道测量。又考虑到目标高速接近靶标的方向未知,目标速度达到了每秒数十米,目标回波的多普勒偏移量大,基于上述背景,文中提出了一种通过基于实孔径成像测量水下高速小目标末弹道的方法,通过目标回波图像分辨确定目标坐标,进而测得目标末弹道,并通过湖上实验进行验证,取得了较好的测量效果。
1 系统功能结构
在靶标上设计安装一种声学成像系统,主要考虑前置预处理、波束形成和后置处理等三个功能部分,如图1所示[2]。
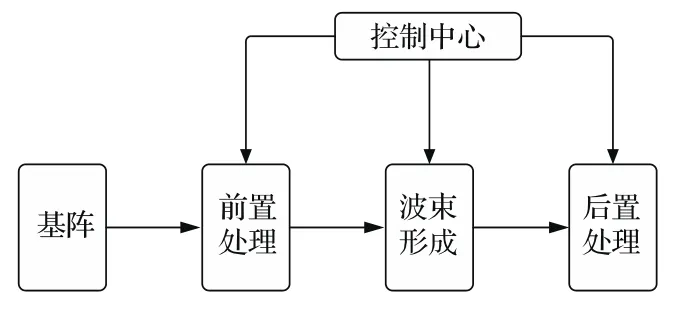
图1 声学成像系统的功能分布Fig.1 Functional map of acoustic imaging system
通过将声学成像系统基阵设计成圆盘状,在圆周上,均匀排布换能器基阵,满足测量不同运动方向目标的成像需要,其排布结构如图2所示,图2中,R0为圆盘半径,N为阵元数。该系统的核心是通过圆阵声呐接收目标回波,经过后置信号处理成像,分辨并确定图中目标方位,测得目标末弹道。根据圆阵的波束对称分布有利于进行快速傅里叶变换(Fast Fourier transform,FFT)运算的特点,系统采取专门的数字信号处理(Digital signal processing,DSP)芯片进行FFT,在频域进行波束形成,缩短信号处理时间,提高成像的实时性。同时,根据高速运动目标的回波多普勒偏移大,导致信号输出幅值变化和波束指向性偏移引起图像失真或畸变的问题,针对性设计双曲调频信号作为发射信号和采用宽带信号处理技术,获得目标回波图像。

图2 系统基阵换能器排布Fig.2 Layout of system array transducer
2 波束形成技术
波束形成技术需从发射和接收两个方面考虑,发射波束时,将基阵经过适当处理能够在预定方向形成指向性,即将能量集中在指定方向获取最大的探测距离;接收信号时,通过波束形成使系统定向接收目标信号,抑制噪声干扰,有效提高信噪比,其实质是空间滤波器[3]。
2.1 圆阵波束形成的基本原理
因为发射波束形成技术和接收波束形成技术的基本原理相同,且系统采用DSP芯片,能够节约计算时间,提高系统成像的实时性,文中以接收端为例说明圆阵的频域波束形成,其基本原理如图3所示。

图3 圆阵波束形成原理Fig.3 Principle of circular array beamforming
其中,第i个水听器阵元坐标为
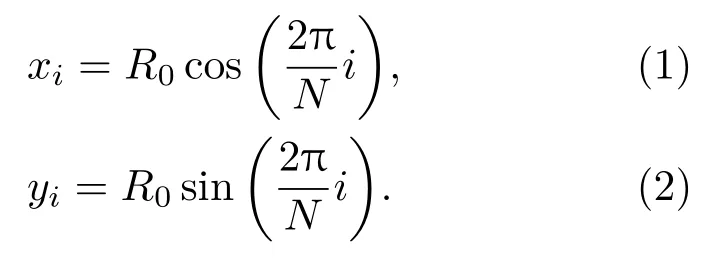
因为信号源到系统的距离远大于基阵直径,信号可视为远场平面波,当信号Xk(i)从第i个阵元以θ角入射时,与圆阵的参考点的相对相移φi为

式(3)中,λ为信号波长。圆阵延时滤波器的传输函数Lk(i)为

式(4)中,w(i)为幅度加权系数。再分别对Xk(i)和Lk(i)进行傅里叶变换得
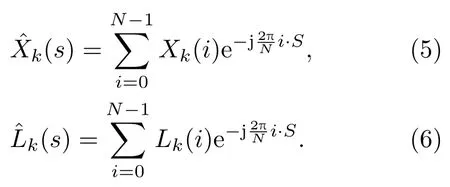
根据傅里叶变换的对称性,波束形成输出函数Yk(m)可对和的乘积进行离散傅里叶逆变换(Inverse discrete Fourier transform,IDFT)求得
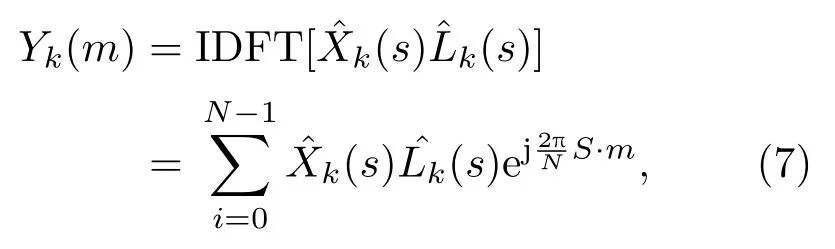
可见,只需要通过三次IDFT运算就可以实现圆阵的波束形成。
2.2 发射信号的选择
信号的频率、时间宽度和带宽是发射信号选择的重要参数,以保证系统有最远的作用距离、最优的距离分辨率和最佳的噪声抑制能力。因为系统按照圆形均匀分布基阵,能够测量各个方向的接近小目标,故为了实现高精度的轨迹测量,发射信号应选择距离分辨率好的宽带信号。被测目标运动速度快,目标回波有较大的多普勒偏移量,则目标方位估计容易出现较大偏差,甚至出现图形畸变,严重影响测量效果,需要选择的发射信号应具有抑制多普勒频偏的特性,故选择双曲调频信号作为发射信号,其时间函数为
式(8)中,f0是信号的中心频率,T是信号的周期。双曲调频信号的相位φ(t)和瞬时发射频率f(t)为
则系统接收的目标回波信号的相位φr(t)和瞬时接收频率fr(t)为
其中,D为回波频率相对中心频率的偏移率。为了保证接收信号瞬时频移与发射信号瞬时频率匹配t0,即使得fr(t)=f(t−t0)成立,求得参数t0。即,当时,

可得

因此,在发射双曲调频信号探测目标时,只需将瞬时发射频率平移t0时间,即可保证接收信号瞬时频移与发射信号瞬时频率的匹配,声学成像系统输出幅度也不会因为目标和靶标的相对运动产生的多普勒频移而变化,具有较高的探测精度,保证声学成像系统的图像稳定。且双曲调频信号是宽带信号,具有较好的距离分辨率,能够较准确测得目标位置。
3 目标成像技术[5]
由于高速运动的小目标和靶标之间存在较大的相对速度,目标回波存在较大的多普勒偏移量,造成常规波束形成的指向性偏差,产生目标方向测量误差和目标回波信号强度减弱,对成像效果有较大的影响。且末弹道测量时,目标到靶标的距离一般是百米左右,声学成像系统接收的信号中,有较强烈的背景混响需要抑制,以保证成像质量。基于此背景,声学成像系统采用宽带处理技术形成高速运动小目标的回波图像,进而测出目标末弹道。
3.1 宽带处理技术原理
文中采用将每一组接收基阵都进行窄带滤波处理的宽带处理技术,对回波信号的每一个频段都实现波束形成,将各个频段的波束形成结果通过非相干相加,覆盖宽带信号的全部带宽,实时显示目标回波图像,分辨被测目标,其原理如图4所示。

图4 宽带信号处理基本原理框图Fig.4 Basic block diagram of wideband signal processing
3.2 混响抑制原理
高速运动小目标和靶标之间较大的相对运动速度产生了较大的多普勒偏移量,形成了较大的频率展宽,而混响的频带主要集中在系统发射信号频率的附近,回波信号处理时,通过将混响频带内的权值置零,可以达到有效抑制混响、形成清晰目标回波图像的目的,如图5所示。实验分析见第4节。

图5 抑制混响原理Fig.5 Suppression of reverberation principle
4 实验验证
通过在湖上进行航行器实航探测实验,验证实孔径声学成像系统的信息采集、宽带波束形成和后置信号处理的混响抑制方法,能够获得较清晰的目标图像,证明该声学成像系统可以较精确测得水下高速运动小目标的末弹道。
实验设备主要包括安装在水下平台上(深度约30 m)的圆盘状实孔径声学成像系统、拖船、小球目标(直径约40 cm,深度约30 m)、信息采集和数据处理等设备,基本实验系统模型如图6所示。实验参数为发射信号中心频率160 kHz,信号脉宽50 ms,发射间隔50 ms,发射声源级约200 dB,环境和平台的噪声级40 dB左右,且由于信号频率较高,吸收损失α达到了50 dB/km左右。实验过程中,拖船以20节左右的航速拖着小球目标运动,期间包括4个直航探测段和3个转弯调整段,如图7所示。期间,平台保持静止状态与被测小球基本处于同一深度,目标距离探测系统最近约30 m,最远约300 m,并利用圆盘状的实孔径声学成像系统对小球目标进行探测。通过数据分析,掌握系统的工作状况,包括背景干扰(流噪声及其他声学系统干扰)、尾流区回波、系统电源干扰以及目标回波情况等,为进一步系统设计提供依据。
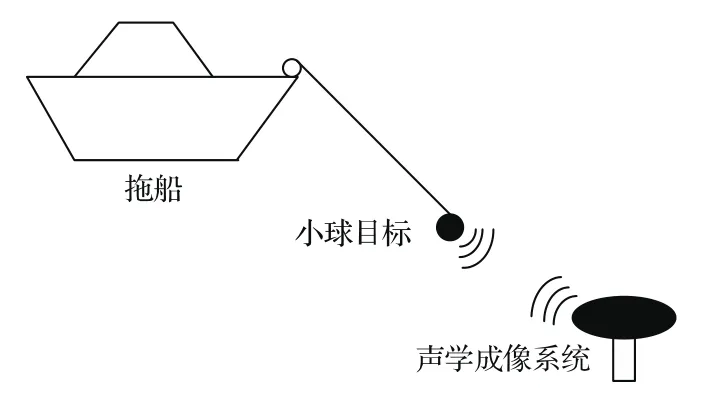
图6 实验系统模型Fig.6 Model diagram of experimental system
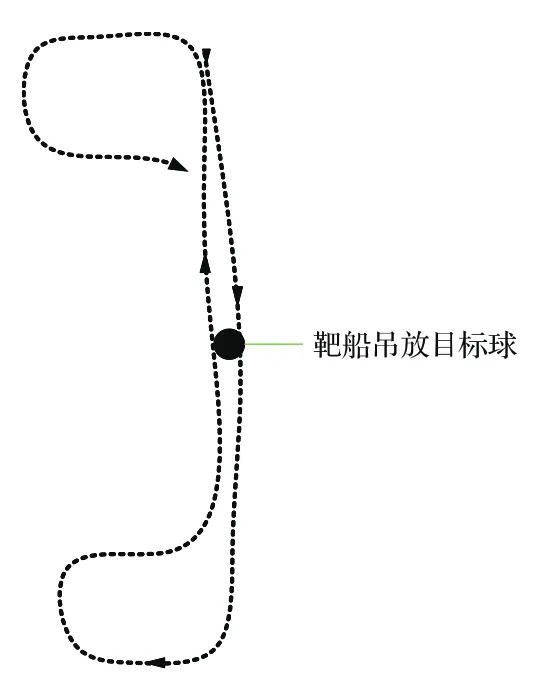
图7 实验拖船及目标小球运动轨迹Fig.7 Trajectory chart of experimental tug and target ball
结合实验对3.2节混响抑制处理的效果进行验证,当目标回波信号未进行混响抑制处理时,系统离湖面较近且受到强湖面混响和体积混响干扰,图像呈现大量的棉絮状亮斑,难以分辨出目标位置,目标回波基本被混响所掩蔽,如图8所示。
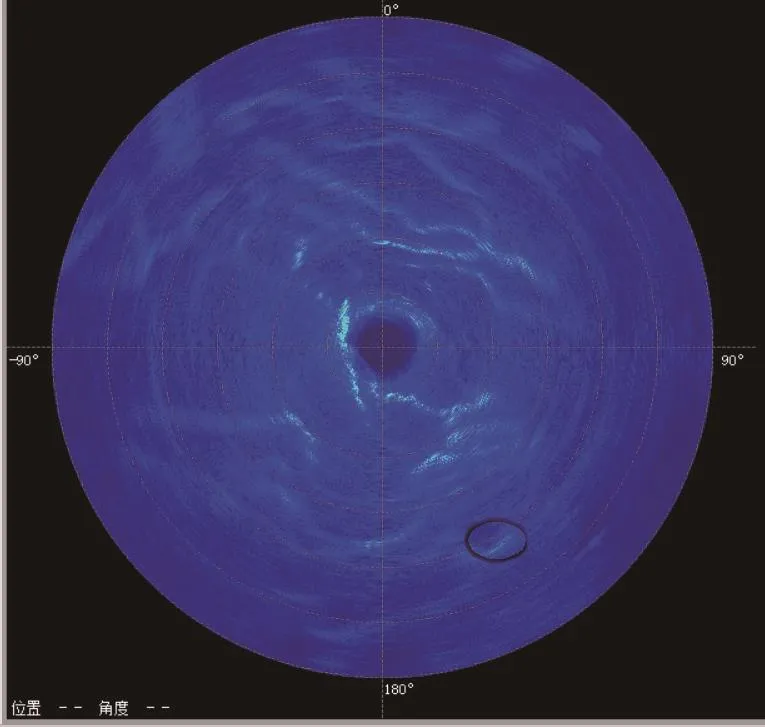
图8 未进行混响抑制处理的目标回波成像Fig.8 Target echo imaging without reverberation suppression
图8中,小圆圈内是疑似目标回波,亮斑处主要是混响、拖船辐射噪声和尾流区回波等背景干扰进入系统构成的成像干扰。考虑到系统探测的距离较近,混响的频谱偏移量较小,基本在发射信号频率附近,且目标和系统间相对速度大,目标回波产生较大的多普勒偏移量,和混响频带存在明显的频带差异,基于此物理机理对混响频带权值置零来抑制混响干扰,净化图像背景,突出目标回波的显示,结果如图9所示。

图9 经过混响抑制处理的目标回波成像Fig.9 Target echo imaging with reverberation suppression
图9中,背景是较纯净的蓝色,说明混响得到了较好的抑制,可以较清晰地辨别出目标回波为(51.3m,−90◦)处的亮点,目标左侧的亮斑区主要是拖船的流噪声和尾流区回波进入系统产生的干扰。可见,通过将混响频带权值置零的方法,能够较好地抑制混响干扰,获得清晰的目标回波图像,能够分辨出目标位置。但此方法也存在混响频谱不能过宽的限制,必要时可用时空自适应处理进一步优化混响抑制性能[14]。对于基于实孔径声学成像系统测量水下高速小目标末弹道需要重点考虑目标距离系统最近点、目标接近系统最大距离可分辨点以及目标远离系统最大距离可分辨点等三个点,才能较好测试系统的探测范围。本次实验最近距离点出现在(46.9 m,−117◦)坐标位置上,此时目标回波强度最大,如图10所示。
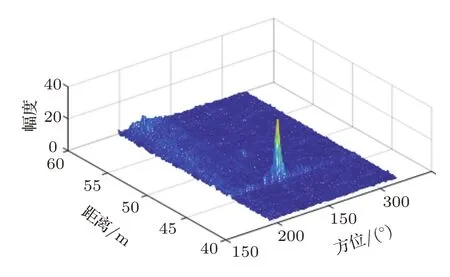
图10 最近点目标回波Fig.10 Nearest point target echogram
目标接近系统最大距离可分辨点出现在(113.5 m,189◦)坐标位置上,如图11所示。

图11 目标接近系统最大距离可分辨点目标回波Fig.11 Target approaching system maximum distance resolvable point target echogram
图11中,圆圈内的目标回波强度较弱,与干扰的强度相当,较难分辨出目标位置。目标远离系统最大距离可分辨点出现在(95 m,320◦)坐标位置上,如图12所示。
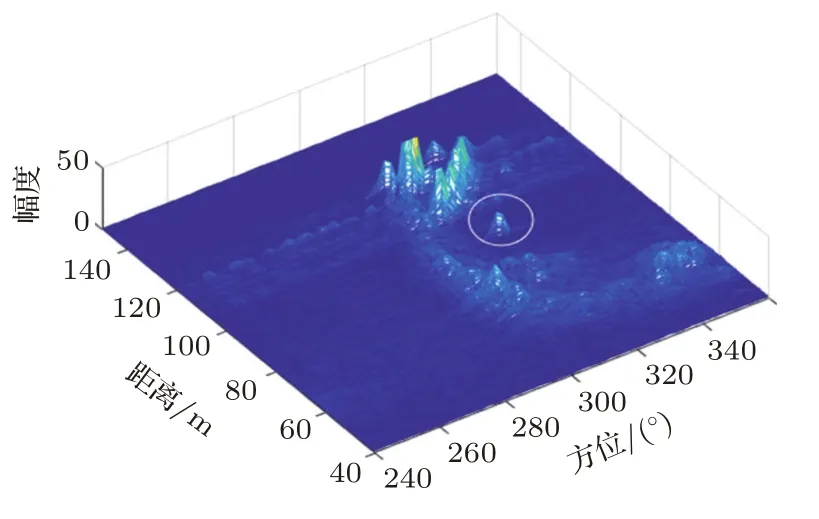
图12 目标远离系统最大距离可分辨点目标回波Fig.12 Target distance away from system maximum distance resolved point target echoes
图12中,圆圈内为目标回波,其受干扰后的成像情况和目标接近系统最大距离可分辨点类似。可见,本文设计的圆盘状实孔径声学成像系统能够对到系统直线距离100 m以内的高速小目标的末弹道进行有效测量。
5 结论
文中提出了一种基于圆阵的实孔径声学成像系统测量高速小目标末弹道的方法,通过宽带信号处理技术抑制背景噪声、尾流区回波和混响,利用双曲调频信号作为宽带调频信号距离分辨率高的优点,具有多普勒不变性,可克服高速运动目标回波多普勒频移较大引起图像失真等优点,获得了较清晰的目标回波图像,能够较好分辨出近距离的目标位置,可解决在没有水下弹道测量系统的水域测量高速小目标末弹道的问题。
