运动反馈虚拟现实四肢康复系统训练模块设计
2019-07-25王俊华吴珺
王俊华,吴珺
1.广东省第二中医院,广东广州市510095;2.广州博爱医院,广东广州市521006
随着人口老龄化进程加快,以及生产安全事故、交通事故等致残因素的影响,脑卒中、脑外伤发生率居高不下[1-3]。肢体运动功能障碍是脑卒中和脑外伤后的常见症状,严重影响患者的生活质量和日常生活能力,并给家庭和社会带来沉重负担[4-5]。
目前国内外研发的肢体康复训练设备,一般分为助动康复训练设备和主动康复训练设备,前者为机器带动,如上肢机器人、机器手、步行训练机器人等,通常价格昂贵,且为被动训练,适合肌力0~Ⅱ级的患者;后者多为家具式上肢康复设备,如磨砂板、手摇轮等,治疗师与患者一对一训练,训练过程枯燥,治疗师人力成本高,训练效率也低[6-7]。瑞士Hocoma公司的上肢康复设备ArmeoPower及其他单上肢康复训练系统属于后者,技术有进步,但在适用范围、精准康复、虚拟现实、运动反馈及四肢协调训练等方面都存在一些问题[8-10]。
本研究设计一种以上肢康复训练为主、双下肢配合训练为辅的四肢康复训练系统,该系统有完善的虚拟现实运动反馈技术和多种精准康复训练方案。
1 总体架构
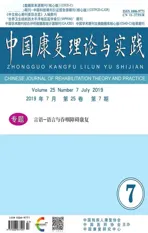
该系统由上肢训练平台、下肢操作装置、虚拟现实系统、智能评估系统、座椅装置和设备底座组成(图 1)。
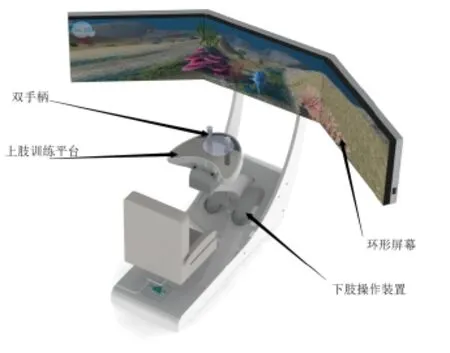
图1 运动反馈虚拟现实四肢训练系统结构示意图
1.1 上肢训练平台
上肢训练平台是四肢康复训练系统的核心构件,主要由上肢操作装置和支撑架组成。上肢操作装置通过垂直摆动关节与支撑架连接,并通过支撑架与设备底座连接。
上肢操作装置包括水平旋转运动装置和锁定结构(电磁刹车)、垂直摆动运动装置和锁定结构,以及在该2个运动装置上的角度传感器(图2、图3)。
水平旋转运动装置的旋转轴和锁定结构在上肢操作装置的腔体内,表面呈现旋转盘和成对设置操作手柄(图1);水平旋转运动绕旋转轴转动,最大角度±105°;水平旋转运动通过电磁刹车实施锁定结构,通过磁滞控制器实现阻尼功能,阻尼0~0.3 N⋅m可调。
垂直摆动运动矢状面绕垂直摆动轴,实现整个上肢操作装置的上下摆动,摆动角度-38°~+15°;锁定结构是滑动杆和旋钮,无阻尼功能。
通过操作两个锁定结构,可实现上肢操作装置的3种工作方式,即水平旋转运动、垂直摆动运动和立体综合运动。
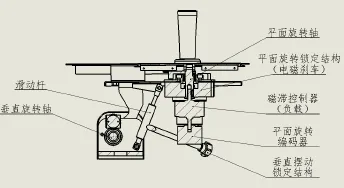
图2 上肢操作装置结构示意图A
图3 上肢操作装置结构示意图B
患者使用时,一般按以下顺序操作。①选择单或双手柄:上肢瘫痪重者选择双手柄操作,由健侧上肢带动患侧上肢运动;瘫痪轻者选择患侧单手柄操作,患侧上肢自主运动;更轻者,除选择单手柄操作外,还可通过磁滞控制器实现阻尼功能,患侧上肢负重水平旋转运动。②选择水平旋转运动:通过锁定垂直摆动运动装置的锁定结构,同时放开水平旋转运动装置的锁定结构,操作手柄完成水平旋转运动;因有平面支撑上肢,该运动容易完成,故适用上肢瘫痪较重者。③选择垂直摆动运动:通过锁定水平旋转运动装置的锁定结构,同时放开垂直摆动运动装置的锁定结构,操作手柄完成垂直摆动运动;因该项运动有一定负重,故适用上肢瘫痪稍轻者。④选择立体综合运动:同时放开水平旋转运动、垂直摆动运动装置锁定结构,操作手柄完成立体综合运动;这项运动难度稍大,需要患者上肢有一定功能,故适用上肢瘫痪轻者。推荐的康复训练方案见表1。
双手柄设计,帮助患者实现健侧上肢带动患侧上肢运动,增大该设备使用范围,一侧上肢肌力0级也可使用。
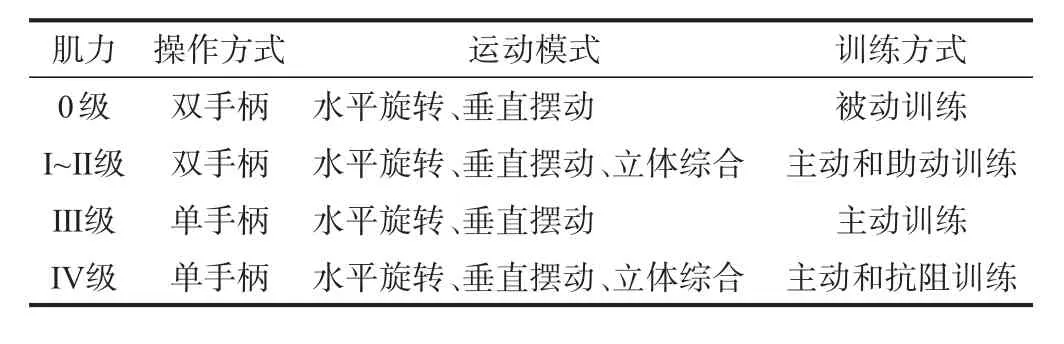
表1 分级康复训练方案
1.2 下肢操作装置
下肢操作装置包括脚踏板、转动轴、轴承座和角度传感器,两脚踏板与转动轴固定连接。脚踏板旋转运动是矢状面运动,绕其转动轴转动,其最大转动范围为0°~35°。
使用时选择单或双脚踏操作。下肢瘫痪重者,选择双脚踏操作,健侧下肢带动患侧下肢脚踝运动;瘫痪轻者选择患侧单脚踏操作。
通过双脚踏结构设计,帮助患者完成下肢踝关节矢状面的屈伸运动,纠正偏瘫患者常见的足下垂。更重要的是,通过传感器和虚拟现实系统,双脚踏运动可以协调配合上肢康复训练。
1.3 底座和座椅
底座用于固定该设备,一端为显示屏支架,一端为固定椅座的滑道,中间固定上肢训练平台的支撑架和下肢操作装置(图1)。
座椅由椅底座、支撑杆、训练椅本体组成。座椅可以前后移动,高度通过气压或电动调节,方向可以旋转。可以满足不同身高患者的需求,并方便瘫痪患者上下。
2 虚拟现实系统
虚拟现实训练系统包括显示模块、训练方案模块与传感器模块。
显示模块由3块显示屏左右连为一体,通过融合技术作为一个环形宽大屏幕使用。
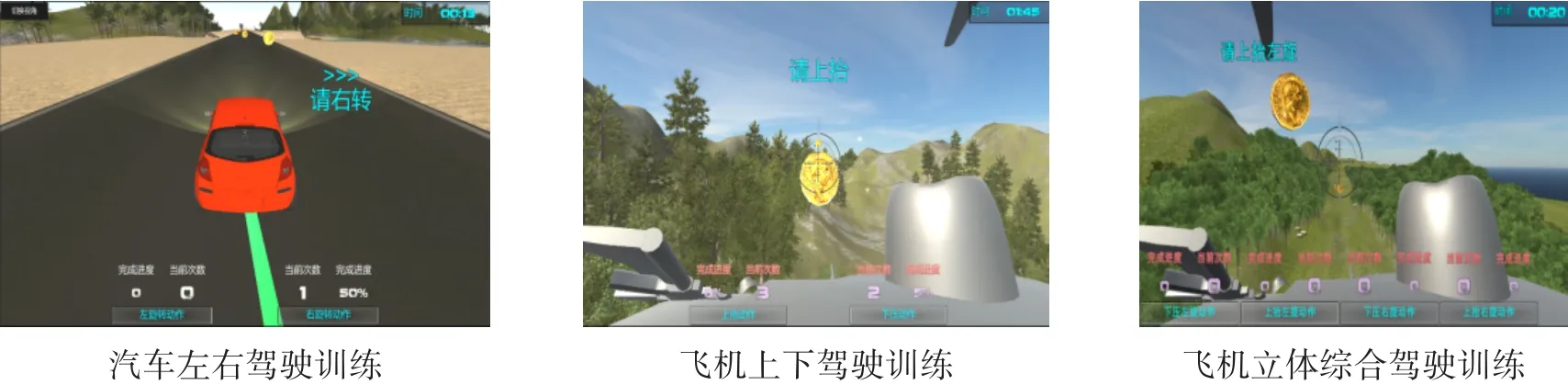
图4 康复训练界面
虚拟训练方案模块利用三维图像生成技术[11],构建虚拟训练的场景。根据康复训练需要,设计虚拟运动目标、虚拟道路或路线、虚拟障碍目标等。
传感器模块采用PAL58系列13位绝对式单转型光电编码器(长春三峰光电仪器制造有限公司),多用于旋转轴旋转量不超过360°的角度测量,并可直接读取所对应的角度值[12-14]。
患者通过操作手柄、脚踏,实现四肢协调运动;利用角度传感器采集四肢训练的角度信号,实现人机交互。具体训练方式为患者与虚拟运动目标和场景的互动,如操纵虚拟运动目标,沿着虚拟的道路或路线,碰撞或躲避障碍目标,实施四肢功能导向性训练。让患者置身于环形宽大屏幕前,增强虚拟现实训练的视觉效果,提高沉浸感[15]。另外,通过智能算法,实时监测患者训练表现,并给予即时运动反馈。
3 精准康复训练方案
该系统的训练方案基于患者肢体功能状态情况而设计,由硬件和软件组成。
康复训练硬件[16]见表1,提供2种操作方式(单、双手柄选择)和3种康复运动方式(平面选择、垂直摆动、立体综合),共6种康复训练模式。训练界面如图4。
确定操作方式、训练模式后,对应出现虚拟现实训练模块;每个模块中,又根据虚拟运动目标的速度、道路或路线的弯曲度、障碍目标数量或排放位置,分为容易、中等、较难3个级别。
综合6种训练方案和3种难易级别,设备可以为瘫痪患者提供18种康复训练方案,满足上肢不同瘫痪程度患者实现肢体精准康复训练的需求。
4 讨论
只有10%左右上肢和手瘫痪患者能恢复到具有实用功能的水平,而日常生活中60%~70%的功能动作需要上肢帮助完成,对患者进行上肢功能康复训练显得尤为重要[17]。另外,偏瘫患者还存在足下垂、四肢运动不协调等诸多问题。探索改善瘫痪患者上肢功能障碍和足下垂、四肢运动不协调的康复技术和设备,一直是康复工作者努力研发的方向。
脑卒中患者的康复应从最简单的运动开始,首先诱导是肩关节内收,直到患者手有运动后,再开始其他运动功能训练[18]。另外,偏瘫患者仅进行单侧训练是不够的,还需要训练对侧,尤其应该进行双手协同训练[19-20]。双侧对称性动作让健侧和患侧同时参与活动,可经胼胝体连接激活患侧脑主要动作区和辅助动作区,最终左右大脑同时激活,促进两侧肢体间协调能力提高,帮助患侧手达成自主活动的目的[21-22];脑损伤后,损伤侧半球对健侧半球的抑制作用减弱,而健侧半球对损伤侧半球的抑制增强,双上肢同时训练可以使半球之间的抑制正常化[23-24]。
我们在四肢康复训练系统的设计中,考虑到尽快“启动”肢体运动和尽早达到运动功能恢复,创新性设计双手柄、双脚踏,使双侧肢体同时训练;提供的虚拟现实运动训练模块属于功能导向性训练方案。在虚拟现实方面,我们提供具有较高沉浸感和互动性的技术:三屏合一的宽大视角环境;具有沉侵感的3D虚拟现实运动反馈训练场景。我们还提供多达18种康复训练方案,实施精准康复训练。该四肢康复训练系统已经获得国家发明专利[25],并申请国际专利[26]。
四肢康复训练系统将现有的单上肢训练模式进展到四肢协调康复训练模式,并在虚拟现实、运动反馈、精准康复方面做了有益创新。但本系统只针对上肢肩肘和下肢踝关节,未涵盖手和腿的功能训练。本设备在临床上初步使用,显示有较好的康复效果。下一步将增加手和腿部的训练功能,并进一步验证其临床康复效果。