基于模糊综合评价的驾驶安全性评价研究
2019-07-25
(西北工业大学 计算机学院,西安 710129)
0 引言
在全球范围内,道路交通事故是造成死亡的重要原因,而影响中国道路交通事故死亡的主要因素是驾驶人行为[1]。随着互联网时代的不断发展,社会经济生活的各个领域都运用到了物联网技术,其中车联网技术为交通管理工作特别是道路安全带来了新的机遇。驾驶员作为主观因素和道路交通信息的接收者、处理者、决策者,在道路交通事故的防范中起到了重要作用,所以对驾驶行为安全性评价是十分有必要的。
本文从车辆操纵、行驶状态等方面建立驾驶员行为安全性评价指标体系,建立模糊综合评价算法模型并实现具有高度可扩展的模糊综合评价算法,以驾驶模拟器实验平台为基础,以模糊综合评价算法为核心,以Android系统环境为开发平台,实现基于Android和汽车控制器局域网络(Controller Area Network, CAN)总线的驾驶员行为安全性评价与分析系统,最后以实车测试结果为依据进行后续算法优化和功能完善。
本文的研究成果能够为提升车辆主动安全研究提供理论基础,为今后驾驶员安全驾驶行为分析与评估研究提供理论基础和实验方法,为车联网环境下车险费厘定体系的制定提供理论与技术支撑,为模糊综合评价算法提供理论基础和实现方法参考,具有重要的理论和实践意义。
1 驾驶行为安全性评价指标体系构建及权重分配
1.1 评价指标体系构建
为科学构建驶员驾驶行为安全性分析与评价指标体系,指标的选取需要仔细考虑,单项指标要有针对性,指标体系要有综合性。本文依据目前国际上对驾驶安全性进行评价的主要参考指标[2]构建评价指标体系,如表1所示。
由表可知,国际上对驾驶行为安全性评价的主要指标有行驶里程、行驶时间、行驶时段(如是否夜间、是否高峰期等)、急加速次数、急减速次数、超速次数、急转弯次数等。本文主要从4个方面即行驶总里程、三急(急加速、急减速、急转弯)、超速驾驶、行驶时段等对驾驶行为安全性进行分析与评估。
根据以上指标选取原则和国际参考指标,结合实际应用需求,可建立如表2所示的驾驶行为安全性评价指标体系。

表1 全球驾驶行为安全性评价指标
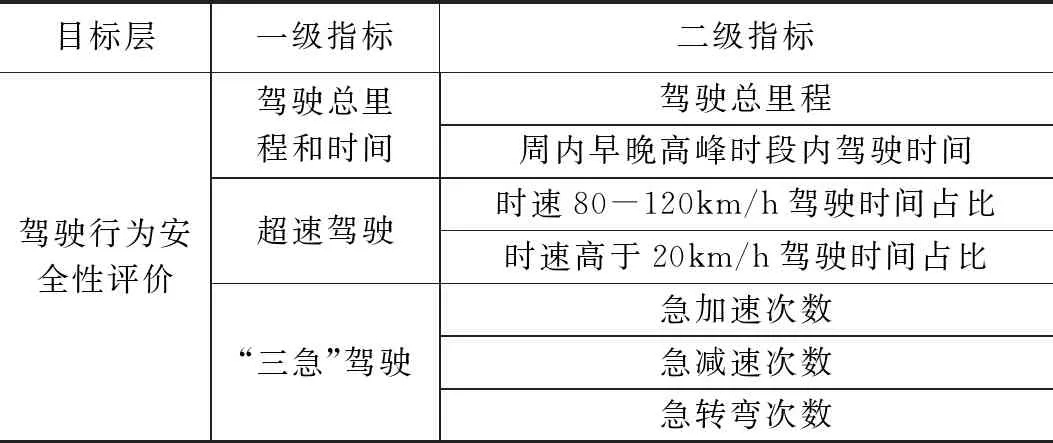
表2 驾驶行为安全性评价指标体系
1.2 权重分配
考虑到评价指标体系的层次结构为递阶型,所以选取运用层次分析法(analytic hierarchy process,AHP)求取指标权重。具体实现步骤如下[3]:
1)建立递阶层次结构。
在本文的研究问题中,评价指标体系由目标层、准则层和指标层三部分构成,具体结构如图1所示。
图1 指标层次结构
2)构造判断矩阵。
以国内外驾驶行为安全性评价研究及相关研究成果为信息来源,综合运用德尔菲法、satty1-9标度法和各项研究成果中的专家经验与比较数据[4-5],在主观判断的基础上对各项评价指标进行评判,得到准则层及各指标层的判断矩阵如表3、表4、表5、表6。
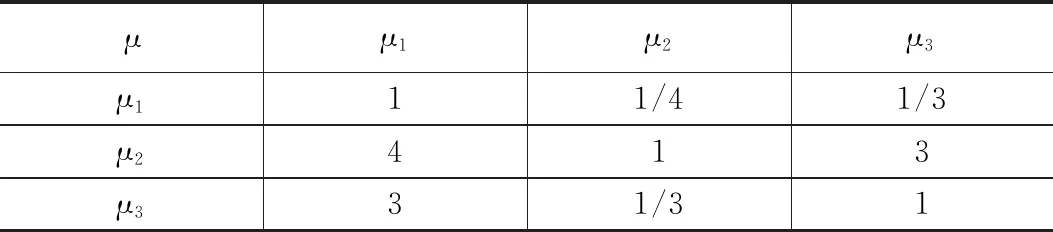
表3 准则层判断矩阵
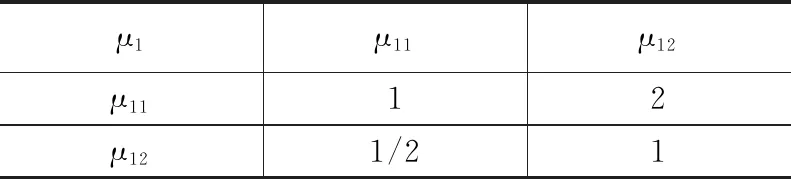
表4 驾驶总里程和时间指标层判断矩阵
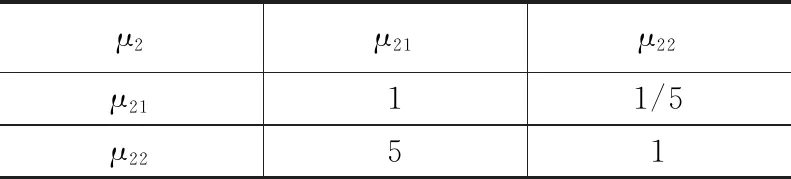
表5 超速驾驶指标层判断矩阵

表6 “三急”驾驶指标层判断矩阵
3)层次单排序及一致性检验。
首先利用公式(1)计算各判断矩阵的行指标乘积:
(1)
然后利用公式(2)计算各行的归一化权重作为判断矩阵中各指标的权重:
(2)
再利用公式(3)、(4)、(5)和表7进行一致性检验,一致性比率小于0.1时通过检验。
(3)
(4)

(5)
最后经过迭代运算得到满足一致性检验的权重分配并将指标层权重结果与准则层权重结果相乘得到最终权重分配结果如图2。

图2 权重计算结果
2 模糊综合评价算法与实现
2.1 模糊综合评价算法
模糊综合评价模型的具体操作步骤[6-7]如下。
1)确定待评价对象的评价指标体系(因素集):
U={u1,u2,…,um}
(6)
U是所有评价指标组成的集合(因素集),m是指标个数,是对评价对象有影响的第i个指标,其中1≤i≤m,有些因素在主观意义上具有一定程度的模糊性,需要后续处理去模糊化。
2)确定待评价对象的评价等级(评语集):
V={v1,v2,…,vn}
(7)
V是所有评语等级的集合(评语集或评判集),n是评价等级数,是第i个评价等级,其中1≤i≤n。
3)确定评价指标权重集合(权向量):
W={w1,w2,…,wm}
(8)
W是评价指标权重向量,m是评价指标的个数,是第i个评价指标的权重,其中1≤i≤m。
4)构造模糊关系矩阵(隶属度矩阵):
Ri=(ri1,ri2,…,rin)
(9)
(10)
R是多因素评价隶属度矩阵,是单因素评价隶属度向量及第i各评价指标对应于每个评价等级的隶属度,是第i个指标相对于第j层评价等级的隶属度,1≤i≤m,1≤j≤n。公式(9)的基本原理是对于每一个单独的评价指标,利用模糊集合运算方法在评价指标集合U与评价等级集合V间建立模糊变换,得到单因素隶属度向量,也称该步骤为单因素模糊评价。公式10是利用单因素隶属度向量得到模糊关系矩阵。
5)计算综合评价结果矩阵(模糊综合评价结果矩阵):
(11)
S是模糊综合评价结果矩阵,W是由公式(8)确定的指标权重向量,R是由公式(10)确定的多因素评价隶属度矩阵,运算符号是模糊算子[8]。
2.2 驾驶行为安全性评价模型的实现
2.1小节介绍了模糊综合评价法的具体步骤,本小节将详细介绍基于AHP的模糊综合评价算法运用于驾驶行为安全性评价的具体实现。
2.2.1 驾驶行为安全性评价指标体系(因素集)
根据图1可建立具有层次结构的因素集如下:
U=(u1,u2,u3)
(11)
u1=(u11,u12)
(12)
u2=(u21,u22)
(13)
u3=(u31,u32,u33)
(14)
2.2.2 确定待评价对象的评价等级(评语集)
为使最终的评价结果为散布在0~100之间的分数,确定评语集的同时需要确定各等级对应的分数。另外,对驾驶行为安全性评价需要为不同的场景确定不同的评价等级。在此基础上构建的评语集见表8。
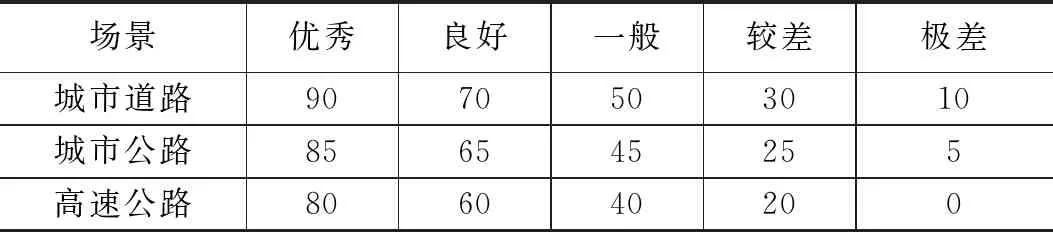
表8 驾驶行为安全性评价评语集
2.2.3 确定评价指标权重集合(权向量)
由图2指标权重的计算进行归一化得到如下结果:
W=(0.1172,0.6144,0.2684)
(15)
w1=(0.6271,0.3729)
(16)
w2=(0.1667,0.8333)
(17)
w3=(0.2966,0.1896,0.5138)
(18)
2.2.4 构造模糊关系矩阵[9-10](隶属度矩阵)
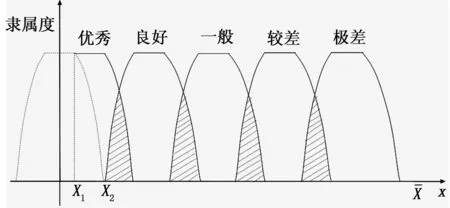
图3 隶属度函数
优秀等级隶属度函数:
(19)
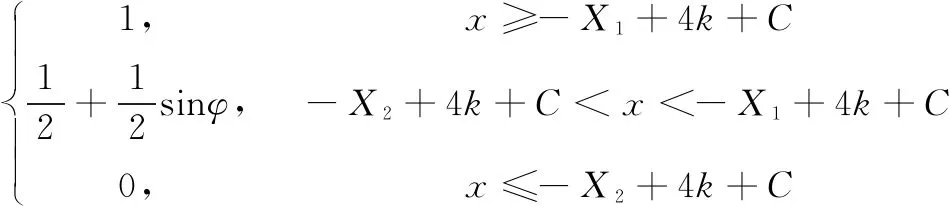
良好、一般、较差等级隶属度函数:
μ(x)=
(20)
极差等级隶属度函数:
μ(x)=
(21)
其中:
对应于良好、一般、较差等级的n分别为1、2、3;
贵州省积极创新水利投融资模式,建立健全水利投入稳定增长机制,全面落实好水利建设基金、提取土地出让收益金12%用于农田水利建设、鼓励信贷融资等各项政策,从公共财政、信贷融资、社会投入等多渠道筹集水利建设资金。预计全年完成水利投资185.52亿元,比2012年增长8.5%,再次创下历史新高。其中,完成中央投资72.52亿元、地方投资73亿元、社会投资40亿元。
2.2.5 计算综合评价结果(模糊综合评价结果向量)
选取了四组实验数据进行运算,得到结果如表9(获取的数据有车速、里程,其他评价指标为间接获取或计算所得)。

表9 模糊综合评价结果向量及归一化结果
3 基于Android的驾驶行为安全性评价软件设计与实现
本文研究的主要内容是在获取车辆状态信息和驾驶员行为信息的基础上运用综合评价算法对驾驶员驾驶行为安全性进行实时评价,并以百分制的形式显示评价结果。Android拥有丰富的开发环境、不断增长的应用市场、大量开发者及众多社区、开源的操作系统代码、开发成本低廉等优势。随着Android的不断发展,它在全球的市场份额不断增长。结合车联网发展现状,将该系统部署到基于Android的手机端能满足驾驶员实时查看评分结果以做出驾驶行为修正的需求并有利于降低安全事故发生的概率,另外,手机端的存储条件能够允许记录每次驾驶的驾驶员行为信息、车辆状态信息、综合评价过程变量信息和驾驶行为安全性评价结果信息,能够为驾驶员行为的监督与修正、驾驶员驾驶行为特征分析以及后续研究等提供数据基础[11]。
为实现基于Android的驾驶行为安全性评价,将软件系统分为5个模块分别实现:基于WIFI的Arduino连接与通信模块、驾驶行为与车辆状态信息处理模块、模糊综合评价算法模块、基于Android的评价指标结果及单次评价结果存储与分析模块、基于Android的UI设计与实现模块,具体的软件系统流程图见图4。
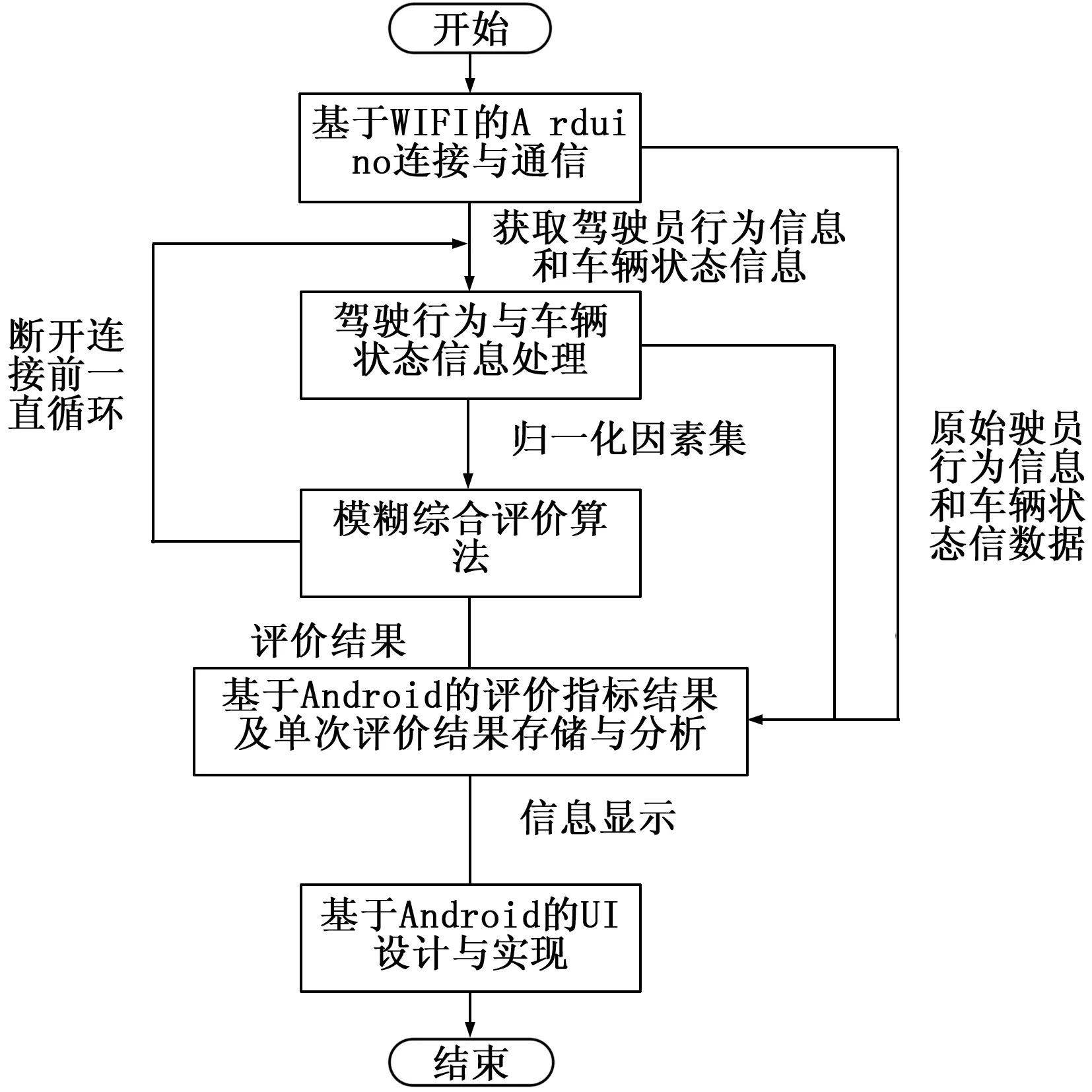
图4 软件系统流程图
首先通过WIFI建立与Arduino的全双工通信,获取汽车诊断第二代系统(the Second On—Board Diagnostics,OBDII)模拟器模拟的或汽车OBD接口传输的车辆CAN总线协议解析的驾驶行为信息和车辆状态信息,作为信息处理模块的输入进行转换和标准化处理,然后将多组处理结果作为模糊综合评价算法模块的输入进行驾驶员安全驾驶行为的分析与评价,在分析与评价的同时将算法中间计算过程存储在Android端的内存中以便后续分析。最终将评价结果以百分制的方式显示在Android端的界面上,帮助驾驶员进行直观的判断和实时调整。
在模糊综合评价模块的具体实现中,考虑到应用场景的多变性,将算法实现与驾驶员驾驶行为安全性评价的应用场景分离,所以能够根据不同的应用需求对改变算法的输入包括评价指标体系的地接层次和指标个数、评价等级、评价指标权重分配方法的选择、隶属度函数的选择、用于计算模糊综合评价结果向量的算子的选择等。
4 实验与验证
4.1 基于OBDII模拟器的实验
OBDII模拟器可以自定义发送的原始数据,通过手动调节OBDII模拟器,可以模拟驾驶员的急加速、急减速、超速行驶等非正常驾驶行为。Arduino开发板获取并处理OBDII模拟器模拟的驾驶员行为信息和车辆状态信息,通过ESP8266模块建立的无线通信局域网将处理后的数据打包发送给Android手机端。Android作为客户端,接收数据并运用本文所述算法对驾驶行为安全性进行评价。Android端接收到数据后处理结果和评价结果见图5。
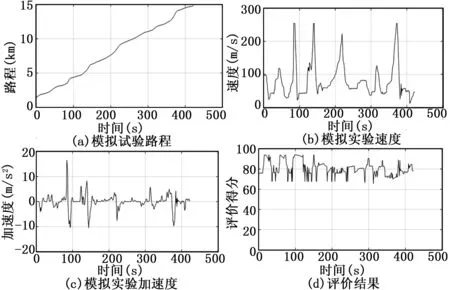
图5 模拟实验数据处理结果和评价结果
4.2 实车实验
将基于Arduino的数据采集模块与车辆OBDII接口连接,Android端通过ESP8266模块无线通信实时接收Arduino端发送的数据,具体数据采集平台搭建见图6,其中上方是实车测试数据采集的平台,左下方是OBDII转串口模块,右下方是Arduino开发板和ESP8266模块。
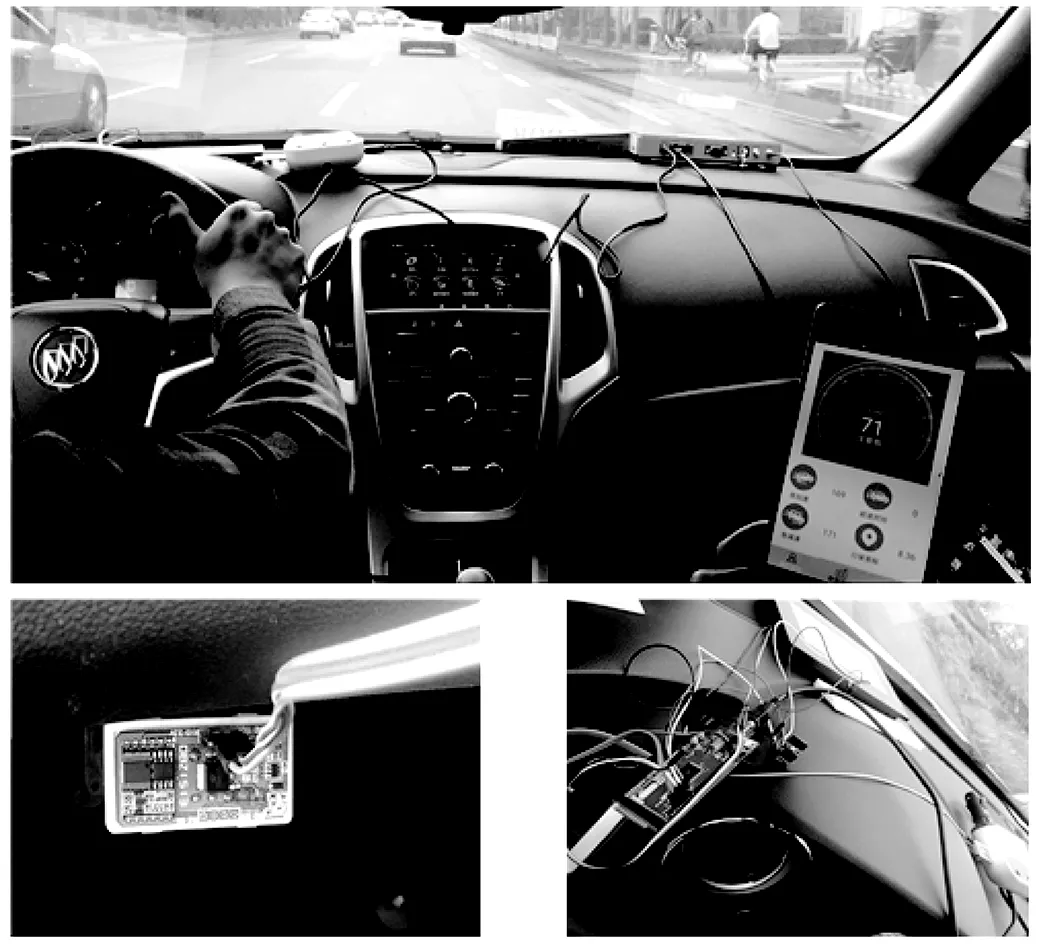
图6 数据采集平台
实车测途经交通拥挤的市区到达车流量较小的郊区,在郊区进行多次急加速、急加速、急转弯等操作,最终按原路径返回,数据处理结果和评价结果见图7。

图7 实车测试数据处理结果和评价结果
4.3 实验结果分析与算法改进
1)分析4.2节和4.3节的实验结果可验证本文提出的方法和实现的系统能够实时且基本准确地对驾驶行为安全性进行评价。
2)部分时间段分数没有变化,查看具体数值发现存在丢帧的情况,说明存在数据丢失、通信不稳定的问题。针对此问题,可以改进数据通信方法,用于信号更强的WiFi模块或采用其他无线通信技术,也可以将实时分析改为延时分析,运用当前驾驶状态信息和规定时间段内的驾驶状态信息,将评分结果作为当前和过去行为的作用总和。
5 结束语
本文首先依据指标选取原则和国际参考指标,建立了驾驶行为安全性评价指标体系,运用AHP求取了各指标权重,利用模糊综合评价算法实现驾驶行为安全性评价。考虑到具体的应用环境,设计并实现了基于Android的驾驶行为安全性评价软件,最后对上述研究成果进行基于OBDII模拟器的实验和实车测试,保存、分析测试结果并依据结果对算法进行改进。
除本文提出的驾驶行为安全性评价指标体系外,对驾驶员行为安全性的评价还可以加入驾驶员视觉信息,驾驶员个人属性如性别、驾龄、违章记录等,驾驶环境如天气、事故多发路段等信息。同时随着车联网技术的不断发展,还可以继续研究多辆车之间的协同,对车队的驾驶安全性进行分析与评估。
