半自动压缩基质型西瓜钵苗移栽机成穴器参数优化
2019-07-23韩长杰袁盼盼
韩长杰,徐 阳,尤 佳,张 静,袁盼盼
半自动压缩基质型西瓜钵苗移栽机成穴器参数优化
韩长杰,徐 阳,尤 佳,张 静,袁盼盼
(新疆农业大学机电工程学院,乌鲁木齐 830052)
在圆饼状压缩基质型西瓜钵苗移栽时,由于栽植机形成的穴形质量不佳,会造成钵苗倾斜。根据西瓜钵苗的移栽农艺要求,结合旱地移栽机械作业的特点,开展了半自动压缩基质型西瓜钵苗移栽机的成穴器参数优化研究。分析了成穴器的运动机理,建立了栽植穴的参数方程,得出理论成穴深度是影响穴口上部纵长的主要因素;利用离散元法对成穴器成穴过程进行仿真分析,验证成穴器结构参数与运动参数的合理性,探明了小端直径不同的成穴器在不同理论成穴深度的成穴效果;结合田间试验对成穴器参数进行优化,试验结果表明,成穴器小端直径为60 mm,理论成穴深度为65 mm时,所成穴形有利于圆饼状压缩基质型西瓜钵苗栽植;仿真及试验结果表明,穴口上部纵长、穴口上部宽度和有效成穴深度的仿真结果与试验结果之间的误差最小值、最大值和平均值分别为0.34%、12.78%、6.7%;7.23%、20.87%、12.33%;1.79%、17.92%、10.46%。该研究为成穴器的优化改进提供参考。
机械化;移栽;优化;成穴器;离散元
0 引 言
圆饼状压缩基质(以草本泥炭、木质素为主要原料,压制成圆饼状,单个质量(40±3)g)常用于培育种子较大、根系较为发达的西瓜和甜瓜类经济作物。其幼苗质量相对于基质块很小,且幼苗较为矮小,多采用覆膜种植[1-3]。开沟式移栽机能够进行小株距裸苗移栽,但不能实现覆膜移栽。鸭嘴式移栽机能够移栽基质块较小的钵苗,鸭嘴式移栽机对幼苗苗龄和外观形状要求高[4],受其工作方式的限制,圆饼状压缩基质培育的幼苗落入鸭嘴时,不能保证钵苗的直立,且栽植时鸭嘴在土壤中打开,部分土壤回流造成穴底不平整,难以保证压缩基质型钵苗移栽直立[5-6]。成穴式移栽机也存在对土壤土质及含水率要求较高等问题,但是该类机型对栽植幼苗要求较低,采用先成穴后放苗工作方式,能够保证钵苗的直立,可实现快速移栽作业,因此发展成穴式移栽技术具有较好的科研前景[7],作为成穴式移栽机械的关键工序成穴技术的研究还未取得突破性的进展。
国外移栽机械生产开始于20世纪中期,成穴式移栽机以意大利Ferrari公司研制的Rotostrapp型移栽机、美国Kennco、Buckeye Tractor公司研制的水轮式成穴移栽机为代表[8]。国内的成穴式移栽机以王晓东[9]在借鉴国外同类产品的基础上研制的2行水轮式移栽机及江苏省农机技术推广站研制的2ZX-2型棉花营养钵移栽成穴机为代表。意大利Ferrari公司研制的Rotostrapp型移栽机采用精确的电子控制系统和株距调控系统,自动化程度较高,技术先进,但其价格昂贵,且不能适应中国的农艺要求,对操作人员的专业素质要求较高,在中国难以推广[10]。美国Kennco、Buckeye Tractor公司、王晓东及江苏省农机技术推广站研制的成穴式移栽机,都是在水轮式成穴机的基础上研制的,该类移栽机适合于大株距作物移栽,需要通过更换水轮来实现不同株距的移栽,所成穴形的质量难以得到保证[11]。
为此,本文根据移栽圆饼压缩基质培育的西瓜钵苗的农艺要求,结合旱地移栽机械作业的特点,以半自动压缩基质型西瓜钵苗移栽机中成穴装置的成穴器为研究对象[12],利用离散元法对成穴器成穴过程进行研究,探究小端直径不同的成穴器在不同理论成穴深度的成穴效果,结合田间试验对成穴器参数进行优化[13]。
1 成穴装置结构与工作原理
图1为半自动压缩基质型西瓜钵苗移栽机成穴装置结构示意图。其中成穴装置主要由成穴器、棘轮机构、摆动机构、机架等组成。工作时,地轮将动力由主动链轮传入摆动机构,摆动机构的曲柄通过连杆将动力传递给从动杆,从动杆往复摆动带动同轴安装的棘轮机构间歇转动,从而带动成穴器间歇旋转,刺穿地膜插入土壤中,随着成穴器的旋转,土壤受到剪切及弹塑性变形,形成栽植穴。
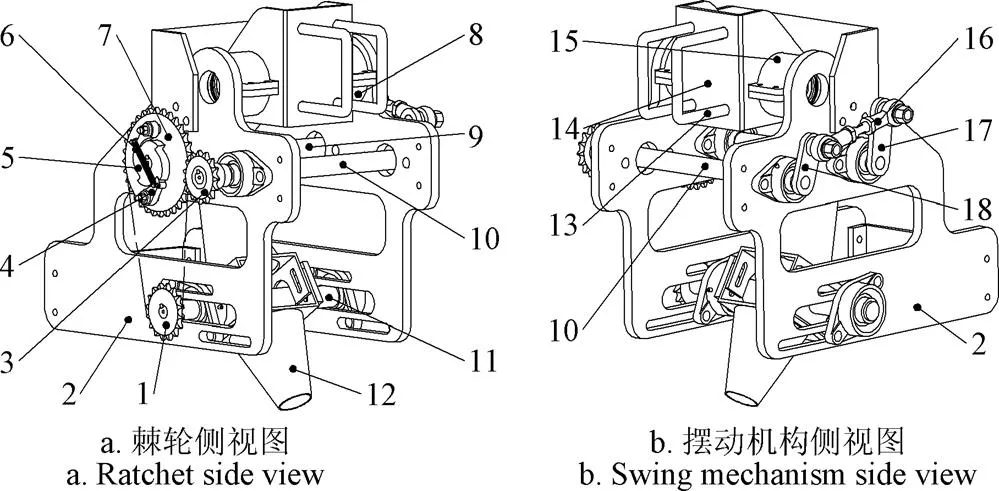
1.成穴器轴链轮 2.机架 3.主动链轮 4.棘爪 5.棘轮 6.弹簧 7.棘轮轴链轮 8.下轴瓦 9.棘轮轴 10.曲柄轴 11.成穴器轴 12.成穴器 13.U型卡 14.固定座 15.上轴瓦 16.连杆 17.从动杆 18.曲柄
1.Sprocket of opener shaft 2.Frame 3.Drive sprocket 4.Pawl 5.Ratchet 6.Spring 7.Ratchet shaft sprocket 8.Lower bearing 9. Ratchet shaft 10.Crankshaft 11.Opener axis 12.Opener 13.U-shaped card 14.Fixed seat 15.Upper bearing 16.Connecting rod 17.Driven rod 18.Crank
图1 半自动压缩基质型西瓜钵苗移栽机成穴装置结构示意图
Fig.1 Schematic diagram of hole-forming device for semi-automatic transplanter for watermelon seedlings raised on compression substrate
2 成穴器参数化设计
成穴器是半自动压缩基质型西瓜钵苗移栽机的核心部件,成穴器的结构参数与运动影响着成穴效果,而栽植穴的形状参数直接影响着栽植质量。成穴器为上端大、下端小圆锥形,以利于成穴时顺利刺入土壤中,工作时随着机器的前进,成穴器间歇转动,顺利的刺入、拔出土壤,在土壤中产生栽植穴。采用圆饼状压缩基质培育的西瓜钵苗的钵体直径为50~51.5 mm,高度为31.5~33 mm[12]。栽植时要求,穴底平整,栽植深度50~70 mm。根据西瓜钵苗钵体圆饼状外形尺寸参数,本研究确定的成穴器小端直径分别为50、60、70 mm,成穴器组件如图2所示。

1.成穴器安装轴 2.链轮 3.成穴器
1.Shaft of opener 2.Sprocket 3.Opener
图2 成穴器组件结构示意图
Fig.2 Schematic diagram of opener device
2.1 成穴机理及参数方程
半自动压缩基质型西瓜钵苗移栽机的成穴过程由入土阶段和出土阶段组成。工作时成穴器挤压剪切土壤,土壤受到剪切力和因挤压力产生的塑性变形,形成栽植穴,了解半自动压缩基质型西瓜钵苗移栽机的成穴机理有助于获得满足移栽要求的栽植穴。
图3为成穴器运动分析。如图3a所示,成穴器上的4个特殊点(分别为点、、、)在一定前进速度下形成的轨迹组成了栽植穴轮廓。成穴时点最先触碰土壤,点与点组成的阻力面向前下方运动剪切挤压土壤,随后点挤压剪切土壤并向最低点运动的过程为入土阶段,当成穴器与地面垂直,点、点处于同一水平深度时,入土阶段结束,成穴器开始向后上方运动进入出土阶段,出土阶段中,点与点组成的阻力面向后上方剪切并挤压土壤,随着机具的前进及旋转离开土壤,土壤中留下栽植穴[7]。

注:点为成穴器的旋转中心,为机器前进方向,点为成穴器底面中点,点与点的连线为成穴器中线;成穴器位置用成穴器中线与垂线夹角、表示,rad;为成穴器理论滚动半径,mm;为理论成穴深度,mm;为成穴器小端直径,mm;点、、、是成穴器上的特殊点;l为成穴器上点与点的连线;′为成穴器中线与l的夹角,为正值,rad;l为成穴器上点与点的连线;为成穴器入土阶段中成穴器中线与l的夹角,为正值,rad;l为成穴器上点与点的连线,′为成穴器出土阶段中,成穴器中线与l的夹角,rad;l为成穴器上点与点的连线,为入土阶段中成穴器中线与l的夹角,为正值,rad。图3b中实线部分表示的是成穴器的入土阶段,双点划线表示的是成穴器的出土阶段。
Note: Pointis center of rotation of opener;is direction of machine; pointis midpoint of bottom surface of opener; line connecting pointand pointis center line of opener; position of opener is represented by angleandbetween center line of opener and vertical line;is theoretical rolling radius of opener, mm;is theoretical depth of hole-forming, mm;is diameter of small end of opener, mm; points,,, andare special points on opener;lis connection pointand pointon opener;′ is angle between center line of opener andl, which is positive value, rad;lis line connecting pointand pointon opener;is angle between midline of opener andlin entering soil stage, which is positive, rad;lis connecting pointand pointon opener,′ is angle between midline of opener andlin leaves soil stage, rad;lis line connecting pointand pointon opener,is angle between midline of opener andlin entering soil stage, which is positive, rad. Solid line in Fig.3b shows opener entering soil stage, two-dot chain line indicates opener leaves soil stage.
图3 成穴器运动分析
Fig.3 Analysis of motion of opener
2.2 穴形参数方程
栽植穴的形成是运动的成穴器外轮廓与土壤相互作用的结果,分析成穴器上特殊点的运动轨迹,即可得出栽植穴的参数方程[14-15]。
在对成穴器进行运动分析时,建立图3b所示坐标系,成穴器与土壤接触的外形轮廓由点、、、的运动轨迹组成。图3b中实线部分表示的是成穴器的入土阶段,双点划线表示的是成穴器的出土阶段,栽植穴由1-2--3-4组成的包络线表示,12段为出土阶段中端点及非阻力面的运动轨迹,2段为端点在入土阶段中形成的运动轨迹,3为端点在出土阶段中形成的运动轨迹,34段为入土阶段中端点及阻力面的运动轨迹。
1)出土阶段中,栽植穴前缘12段的参数方程

式中l为成穴器上点与点的连线距离,mm;′为成穴器出土阶段中成穴器的转动弧度,数值逐渐变大,为正值,rad。
2)入土阶段中,栽植穴前缘2段的参数方程

式中为成穴器入土阶段中成穴器的转动弧度,数值逐渐变小,为负值,rad。
3)出土阶段中,栽植穴后缘3段的参数方程

4)入土阶段中,栽植后缘34段的参数方程

通过以上4组参数方程,分4部分描绘出栽植穴的轮廓。分析上述参数方程可知,当牵引速度一定时,成穴器旋转速度过大时,栽植穴的轮廓就由特殊点、的运动轨迹组成,此时栽植穴的轮廓就由参数方程(2)、(3)表示,但所成栽植穴尺寸较大且侧壁陡峭,不利于穴形的稳定。若成穴器转速较小时,栽植穴成穴轮廓由(1)~(4)组方程式表示,形成上端大、下端小的栽植穴,有利于保证穴形的稳定[14]。
2.3 栽植穴形状参数
联立公式(1)~(4)绘制轨迹曲线,轨迹曲线上的各点坐标可由参数方程得出。栽植穴轮廓参数化,有助于了解影响栽植穴轮廓主要因素。设处于轮廓线12、34任意距离地面深度为1的直线与栽植穴轮廓线交点为、,处于轮廓线2、4任意距离地面深度为2的直线与栽植穴轮廓线交点为′、′,成穴器旋转中心距地面高度为,因栽植穴前缘与栽植穴后缘关于轴对称,故穴口上部纵长l为
l=x−x=2x(5)
同理可得,栽植穴在深度为2时,穴口底部纵长l为

分析式(5)、(6)可知,在成穴器结构参数仅小端直径变化的情况下,理论成穴深度为影响穴口上部纵长l与穴口下部纵长l′n′的关键因素[14];穴口宽度(垂直于机器行走方向测量穴口)与成穴器尺寸参数及理论成穴深度有关。因此,本研究确定的成穴器理论成穴深度分别为50、65、80 mm。
3 EDEM仿真分析
3.1 成穴器建模
为保证仿真结果的准确性,采用Solidworks三维制图软件,按照1:1的比例建立小端直径分别为50、60、70 mm的3种成穴器组件模型,并将其另存为.stp格式[16-18]。
3.2 土壤颗粒参数
离散单元法是把离散体看作具有一定形状和质量的离散颗粒单元的集合,并将其理想化为相互独立、相互接触和相互作用的颗粒群体[17-18],因此土壤模型参数的准确性是离散元模拟的基础。为了提高模型的真实性,由于旋耕后耕层土壤较为疏松,孔间隙大,土壤颗粒的基本结构主要包括块状颗粒、核状颗粒、片状颗粒、柱状颗粒的情况,使用离散元软件中球型颗粒的不同组合替代不同类型的土壤颗粒形状,模拟土壤团聚体,共建立了球形、线形组合、三角形组合、四面体组合分别近似的代表块状、核状、片状、柱状土壤颗粒,土壤颗粒模型如图4所示,设置土壤颗粒填充半径为5 mm,模型参数见表1所示[19]。土壤颗粒参数通过参考相关文献取得[20-26],仿真前测量了选用试验地的土壤的含水率及土壤堆积角,通过土壤仿真堆积角修正颗粒参数。选用离散元模型基本参数如表2所示。

图4 土壤颗粒模型

表1 土壤模型参数
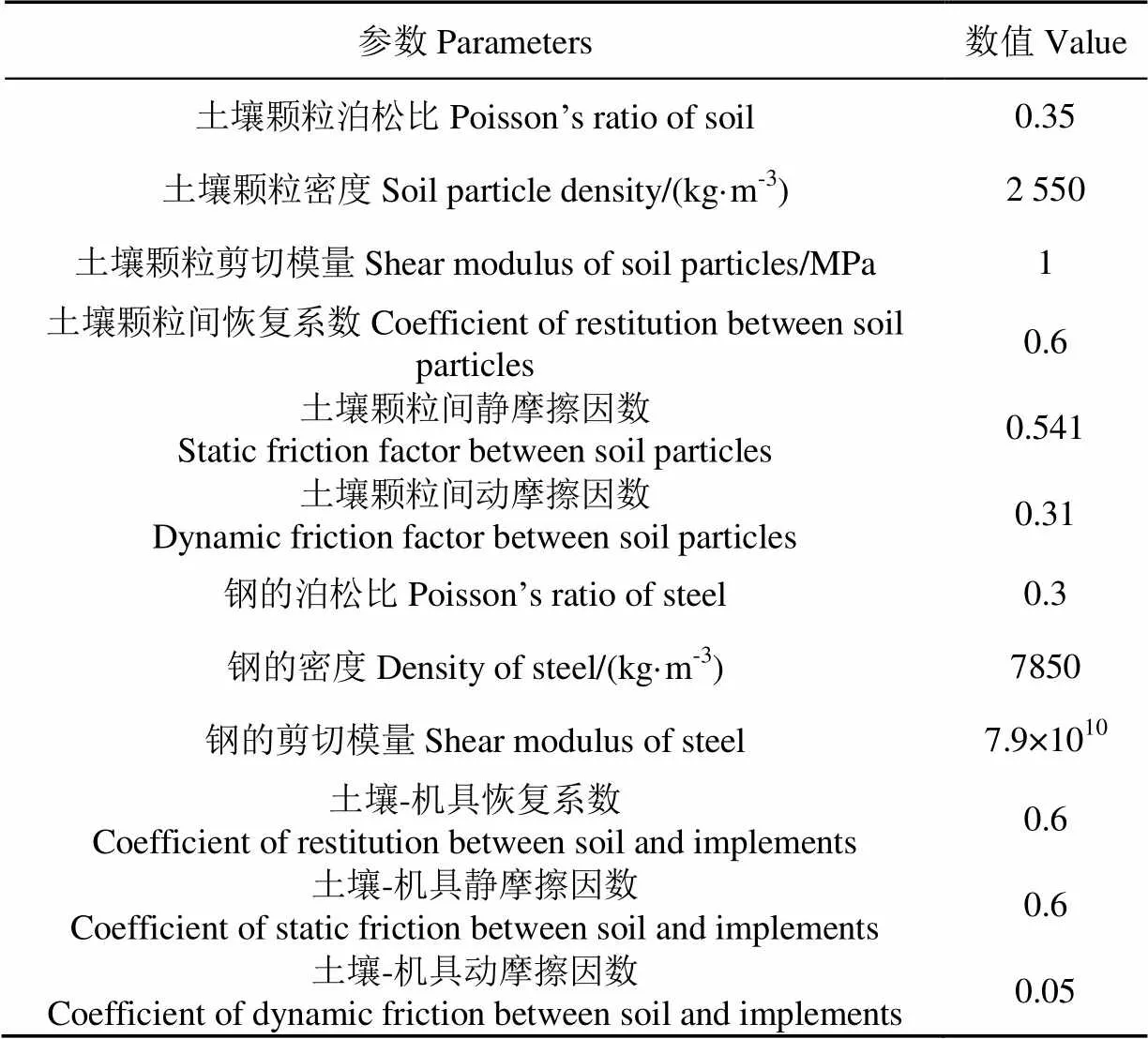
表2 离散元模型基本参数
3.3 土壤接触模型
颗粒运动必然会引起颗粒之间的相互碰撞,颗粒之间有力的产生,接触模型的分析计算直接决定了粒子所受的力和力矩的大小,对于不同的仿真对象,必须建立不同的接触模型,研究发现材料弹塑性模型适合土壤在受力条件下的应变特征[17-18],选择能够体现土壤弹塑性和土壤黏结性的The Edinburgh Elasto-Plastic Cohesion Model模型[20,27]。
3.4 EDEM成穴模型
为满足成穴作业要求,根据栽植穴理论成穴深度及成穴器的形状尺寸,在模型中建立尺寸(长×宽×高)为400 mm×200 mm×150 mm的虚拟土槽,参数设定完成后,颗粒工厂生成颗粒,沉积后形成土槽,待土槽中颗粒稳定后,导入的成穴器组件以5.14 rad/s旋转,并以0.6 m/s开始向方向运动,仿真过程共历时3 s[28-30]。
3.5 成穴过程验证与仿真分析
传统的试验方法表述成穴器与土壤相互作用过程较为困难,为更加形象的了解不同小端直径成穴器在不同理论成穴深度成穴时,对所成栽植穴的形状及尺寸参数的影响[24],根据成穴器参数化设计及栽植穴参数方程,成穴器小端直径分别为50、60、70 mm,理论成穴深度分别为50、65、80 mm,试验分组如表3所示。采用EDEM的clipping模块沿成穴器总成前进方向及垂直前进方向进行剖视。为便于观察成穴过程及栽植穴成穴效果,对模拟土槽的土壤分层上色。利用EDEM的tool模块中的测量命令,测量栽植穴深度及其穴口大小[17-18]。

表3 试验分组
成穴过程中的入土阶段如图5所示,从图中可以看出,已经有土壤颗粒产生失效破碎进入成穴器内部,随着成穴器的旋转,成穴器内部积聚的土壤颗粒不断增加。当成穴器垂直于地面时,成穴器向下压取土壤,因成穴器为倒锥形的形状,成穴器内土壤颗粒在重力的作用下对成穴器内壁产生侧压力,以及土壤颗粒之间的凝聚力共同的作用,有利于成穴器将土壤颗粒从栽植穴中取出。出土阶段土壤颗粒受到成穴器的剪切挤压继续破碎,使土壤颗粒随成穴器的旋转被带出地面[29],与本文机理分析部分描述的过程吻合。
为探究小端不同直径成穴器,在不同深度对成穴效果的影响,机具沿方向运动。成穴器小端直径为50 mm的成穴器,理论成穴深度为50、65 mm时,所成栽植穴穴口较圆,穴底颜色主要由绿色和蓝色组成,理论成穴深度为80 mm时,穴底由红色、绿色、蓝色组成,颜色差异表明穴底不平整。这是由于成穴器小端直径较小,成穴器压取土壤颗粒时,进入成穴器内部土壤颗粒数量有限,大部分剪切破碎的土壤颗粒聚集在成穴器外侧,土壤颗粒回填造成穴底不平整。小端直径为70 mm的成穴器,理论成穴深度为50、65、80 mm时,所成栽植穴底部主要由蓝色和绿色组成。这是由于小端直径为70 mm的成穴器,成穴器小端直径较大,破碎的土壤进入成穴器后,成穴器内壁斜度较大,压取进入成穴器内部土壤颗粒的弹性形变及黏结力不足以克服重力的作用掉落,导致栽植穴穴底不平整。小端直径为60 mm的成穴器,理论成穴深度分别为50、65、80 mm时,栽植穴穴底颜色主要由绿色构成,成穴效果如图6所示。小端直径为60 mm的成穴器,所成栽植穴的穴底平整度优于其他2种规格的成穴器。

1.土槽 2.成穴器
1.Soil-bin 2.Opener
图5 成穴器入土阶段绝对坐标位置
Fig.5 Absolute coordinate position of opener entering soil stage
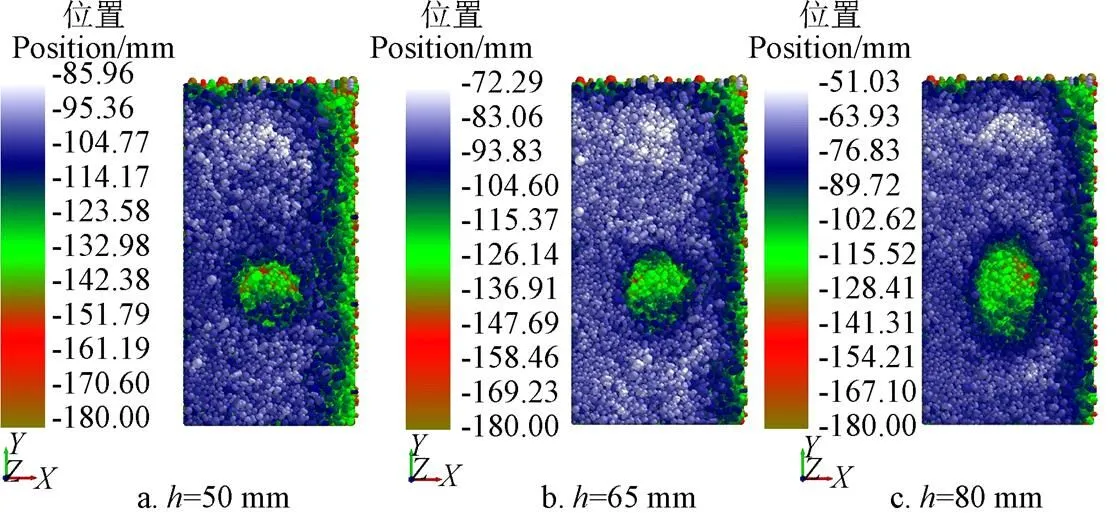
注:穴口上部纵长测量,沿着机器前进方向(轴方向),穴口上部宽度测量,垂直于及其行走方向(轴方向),为理论成穴深度,mm。
Note: Measurement of upper longitudinal length of the hole, along direction of machine (-axis direction), measurement of upper width of hole, perpendicular to direction of its walking (-axis direction),is theoretical depth of hole-forming, mm.
图6 小端直径为60 mm时成穴仿真效果
Fig.6 Simulation effect of hole punch when small end diameter is 60 mm
栽植穴仿真测量结果如表4所示,小端直径相同的成穴器随着理论成穴深度的增加,穴口上部纵长及有效成穴深度是增大的,穴口上部宽度受成穴器与土壤接触截面尺寸的影响,与理论成穴深度正相关[31]。成穴器小端直径越大,所成穴形的穴口上部宽度、穴口上部纵长越大,当理论成穴深度为50、65 mm时,所成栽植穴穴口上部纵长及穴口上部宽度相差不大,所成穴口较圆,当理论成穴深度为80 mm时,成穴器与土壤接触范围较大,穴口上部纵长增加,所成穴口为椭圆形。理论成穴深度为50 mm时,有效成穴深度分别为38、39、37 mm,不能满足栽植要求;理论成穴深度为80 mm,成穴器小端直径为60、70 mm时,栽植穴穴口上部纵长分别为158.56、166.63 mm,穴口尺寸较大,减弱了覆膜移栽作物保水、增温效果,不利于幼苗生长发育[32-33]。
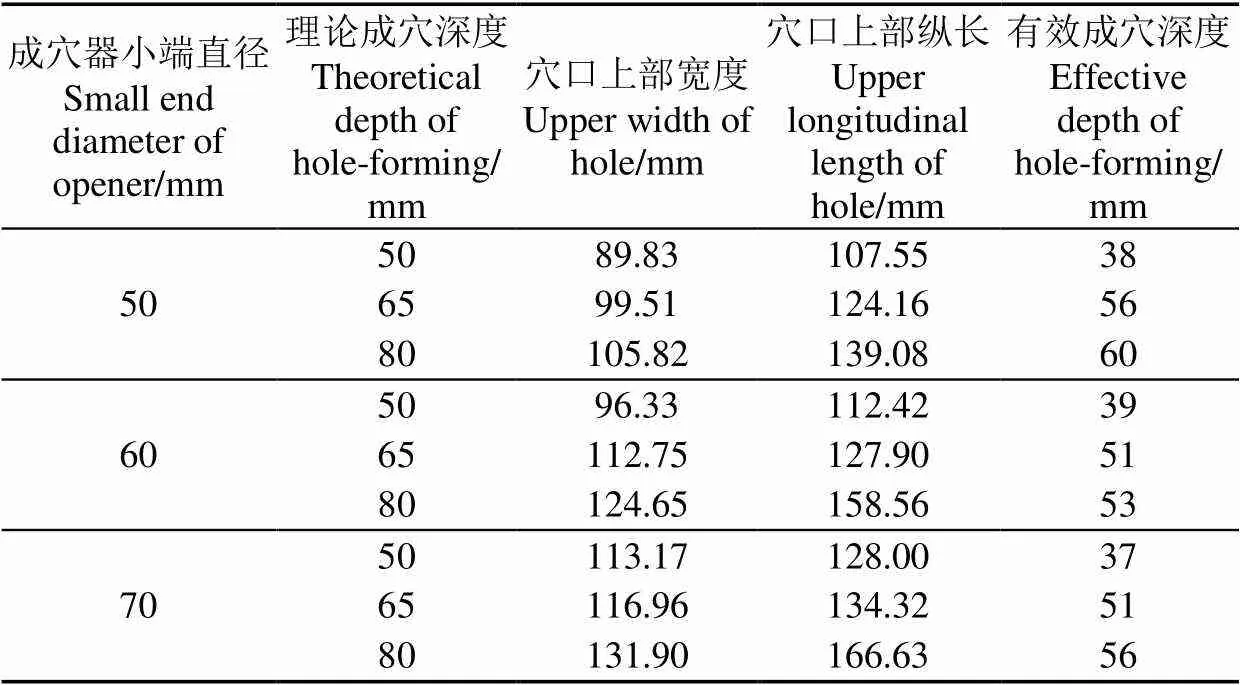
表4 栽植穴仿真结果
由图6中栽植穴的成穴效果及表4中的仿真结果分析可知,成穴器小端直径为60 mm,理论成穴深度为65 mm(图6b),穴底颜色主要为绿色,穴底较为平整,有效成穴深度为51 mm,穴口上部纵长、穴口上部宽度尺寸相对较小,能够满足幼苗移栽要求。
4 试验与分析
为检测上述设计方法的准确性和成穴装置工作的可靠性,试制试验样机1台及3对小端直径分别为50、60、70 mm的成穴器,在理论成穴深度分别为50、65、80 mm时,进行田间试验。田间试验于2018年10月在山东省金利达机械制造有限公司的试验田进行,烘干法测得土壤含水率为13.8%。试验田要求旋耕后整地,保证地面平整,地轮直径600 mm,设计时取滑移率为1.2,工作时地轮与成穴器的传动比为1:1.26。
4.1 试验方法
为方便试验结果的测量,试验时试验地不铺膜,试验分组如表3所示,共9组试验,每组试验连续完成30个栽植穴,测定中间连续的20个栽植穴的穴口上部纵长、穴口上部宽度及有效成穴深度。各试验指标测量结果取平均值为每组试验的结果。图7所示为田间试验情况。

图7 田间试验
图8为栽植穴仿真与田间试验测量结果。由图8可知,同一成穴器随着理论成穴深度的增加穴口上部纵长也随之增大;同一理论成穴深度的不同成穴器,所成穴口上部纵长随着成穴器小端直径的增大而增大。成穴器小端直径变化对穴口上部纵长的影响弱于理论成穴深度的变化,理论成穴深度对穴口上部纵长的大小影响较为显著。试验结果与仿真结果变化趋势一致,仿真结果与试验结果之间的误差最小值为0.34%,最大值为12.78%,误差平均值为6.7%[34]。
由图8可知,同一成穴器,随着理论成穴深度的增加穴口上部宽度增大,同一理论成穴深度的不同成穴器所成穴口上部宽度随着成穴器小端直径的增加而增大。成穴器小端直径越大,随着理论成穴深度的增加,穴口上部宽度增加的越缓慢。试验结果与仿真结果变化趋势一致,仿真结果与试验结果之间的误差最小值为7.23%,最大值为20.87%,误差平均值为12.33%。
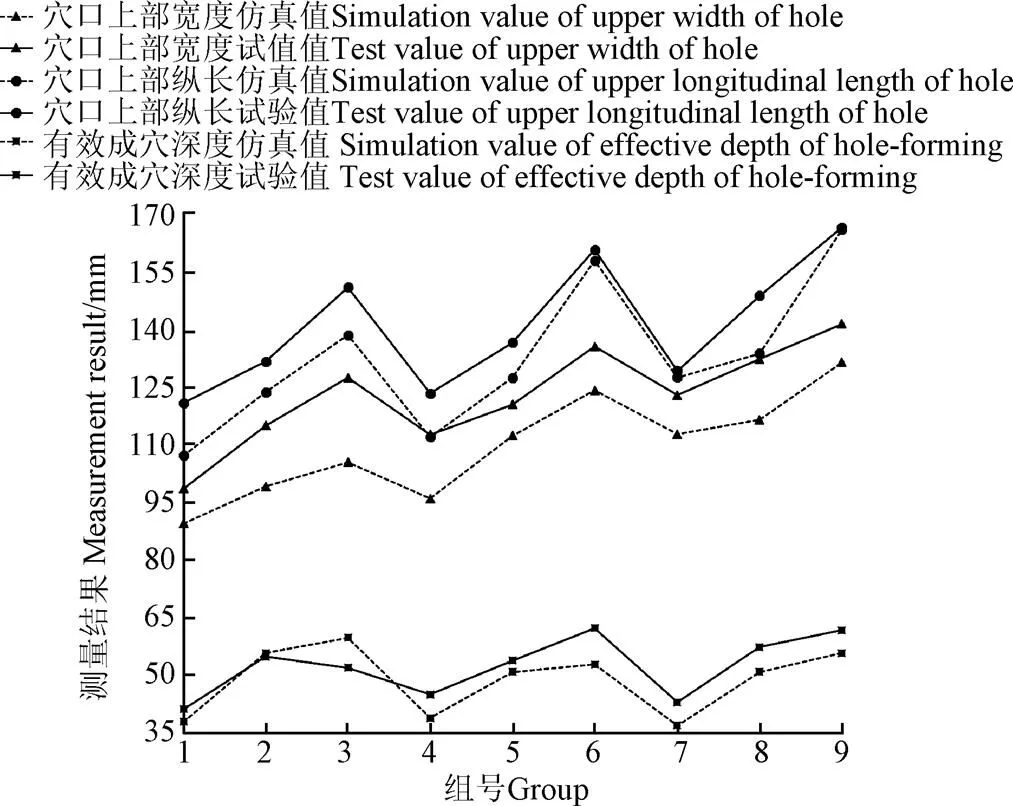
图8 栽植穴仿真与田间试验测量结果
由图8中有效成穴深度试验值曲线可知,组3中试验有效成穴深度为52.1 mm,小于组2有效成穴深度(55 mm)。因理论成穴深度深与土壤接触范围较大,土壤颗粒受到扰动的范围较广。试验地土壤含水率比较低,土壤颗粒尺寸较小。成穴器小端直径小,进入成穴器内部的剪切破碎的土壤颗粒数量少,大部分剪切破碎的土壤颗粒在成穴器外侧,受到扰动的土壤颗粒回填,有效成穴深度减小。其余各组试验结果与仿真结果变化趋势一致。试验测得小端直径为60 mm,理论成穴深度分别为50、65、80 mm时,栽植穴有效成穴深度分别45.1、54、62.5 mm;小端直径为70 mm,理论成穴深度分别为50、65、80 mm时,栽植穴有效成穴深度分别43.1、57.5、61.9 mm,说明随着理论成穴深度的增加栽植穴的有效成穴深度是增加的,同一理论成穴深度的不同成穴器所成穴形有效成穴深度一致,仿真结果与试验结果之间的误差最小值为1.79%,最大值为17.92%,平均误差为10.46%。
由田间试验结果可知,组1、组4、组7所成栽植穴平均有效成穴深度分别41.3、45.1、43.1 mm,不能满足农艺要求。组3、组6、组9所成栽植穴有效成穴深度分别为52.1、62.5、61.9 mm,穴口上部纵长分别为151.6、161.4、167.2 mm,减弱了覆膜移栽作物保水、增温效果。组2、组5、组8所成栽植穴有效成穴深度分别为55、54、57.5 mm,能够满足栽植要求,组8所成栽植穴上部穴口尺寸相对于组2、组5较大。组2、组5所成栽植穴穴口上部尺寸相差不大,其中组2所成栽植穴的出土位置,土壤回填产生了斜面,组5所成栽植穴穴底较为平整。因此,组5所成穴形更利于栽植(小端直径为60 mm,理论成穴深度为65 mm)。结合3项试验数据及仿真结果可知,3项指标的平均误差为9.83%,说明仿真环境下合适的土壤颗粒参数及黏结模型可以模拟出机具与土壤相互作用的情况。
4.2 膜上成穴试验
随后为检测成穴装置是否满足膜上成穴要求,在相同的条件下进行了膜上成穴试验,膜上成穴与不覆膜成穴试验结果变化趋势一致。成穴效果如图9所示,成穴装置能够满足膜上成穴要求。
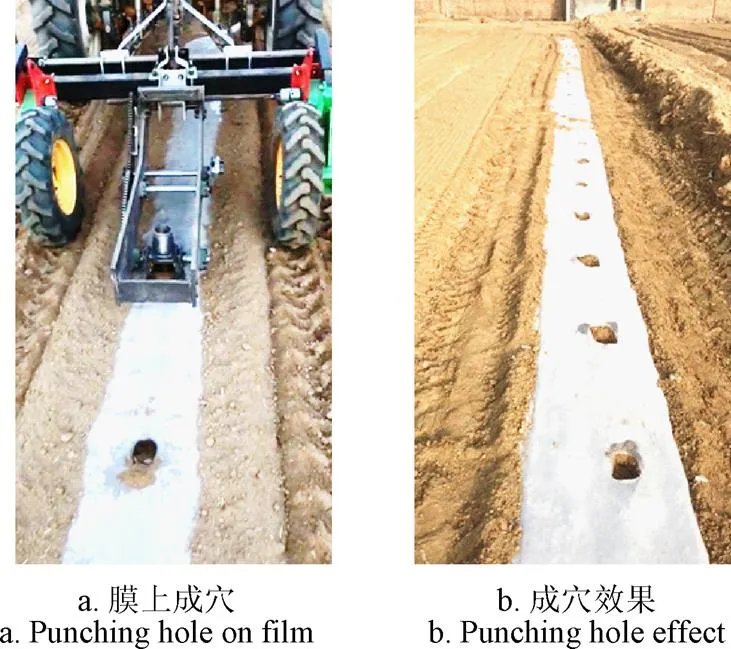
图9 膜上成穴功能验证及膜上成穴效果
5 结 论
1)通过分析成穴器的运动机理,研究成穴器的运动参数方程,建立了栽植穴参数方程,在成穴器结构参数仅小端直径变化的情况下,理论成穴深度为影响穴口上部纵长、穴口下部纵长和穴口宽度的关键因素。利用离散元法对成穴器成穴过程进行研究,验证了成穴器结构参数与运动参数的合理性,探究小端直径不同的成穴器在不同理论成穴深度的成穴效果,测量了栽植穴穴口上部纵长、穴口上部宽度,有效成穴深度。
2)由仿真结果及田间试验结果分析可知,同一成穴器随着理论成穴深度的增加穴口上部纵长、穴口上部宽度是增加的,同一理论成穴深度的不同成穴器所成穴口上部纵长、穴口上部宽度随着成穴器小端直径的增加而增大,成穴器小端直径变化对穴口上部纵长的影响弱于理论成穴深度的变化,理论成穴深度对穴口上部纵长的大小影响较为显著。成穴器小端直径越大,随着理论成穴深度的增加,穴口上部宽度增加的越缓慢。穴口上部纵长、穴口上部宽度和有效成穴深度仿真结果与试验结果之间的误差最小值、最大值、平均值分别为0.34%、12.78%、6.7%;7.23%、20.87%、12.33%;1.79%、17.92%、10.46%。结合3项试验数据及仿真结果可知,3项指标的平均误差为9.83%。成穴器小端直径为60 mm,理论成穴深度为65 mm时,穴底较为平整,所成栽植穴利于圆饼状压缩基质培育的西瓜钵苗栽植,穴口上部纵长、穴口上部宽度尺寸相对较小,利于覆膜移栽作物的生长。
仿真环境下合适的土壤颗粒参数及黏结模型可以模拟出机具与土壤相互作用的情况,该研究能够为成穴器的优化改进提供参考。
[1] 胡君辉,葛政元,田海丹,等. 压缩型基质营养钵在嫁接西瓜育苗上的应用效果[J]. 浙江农业科学,2009(1):61-62.
[2] 李桂芬,何毅,覃斯华,等. 西瓜和甜瓜压缩型基质营养钵育苗技术规程[J]. 中国瓜菜,2016,29(10):46-48.
[3] 张庆. 压缩型基质营养钵西瓜育苗技术研究[D]. 上海:上海交通大学,2010.
Zhang Qing. Study on Nursery Technique of Watermelon with Compressed Substrate Block[D]. Shanghai: Shanghai Jiao Tong University, 2010. (in Chinese with English abstract)
[4] 向伟,吴明亮,官春云,等. 油菜钵体苗移栽栽植孔成型机设计与试验[J]. 农业机械学报,2017,48(10):40-48,58.
Xiang Wei, Wu Mingliang, Guan Chunyun, et al. Design and test of transplanting hole-forming machine for rapeseed potted seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(10): 40-48,58. (in Chinese with English abstract)
[5] 石铁. 全自动玉米秧苗移栽机的研制与试验[J]. 农业工程学报,2015,31(3):23-30.
Shi Tie. Development and test of automatic corn seedling transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 23-30. (in Chinese with English abstract)
[6] 封俊,秦贵,宋卫堂,等. 移栽机的吊杯运动分析与设计准则[J]. 农业机械学报,2002,33(5):48-50.
Feng Jun, Qin Gui, Song Weitang, et al. The kinematic analysis and design criteria of the dibble-type transplanters[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 33(5): 48-50. (in Chinese with English abstract)
[7] 向伟. 油菜移栽机栽植孔成型机构试验研究[D]. 长沙:湖南农业大学,2014.
Xiang Wei. Experiment Study on Planting Hole Forming Device of Transplanting Machine for Rape[D]. Changsha: Hunan Agriculture University, 2014. (in Chinese with English abstract)
[8] 卢勇涛,李亚雄,刘洋,等. 国内外移栽机及移栽技术现状分析[J]. 新疆农机化,2011(3):29-32.
Lu Yongtao, Li Yaxiong, Liu Yang, et al. Status analysis of abroad’s transplanting machine and transplanting technology[J]. Xinjiang Agricultural Mechanization, 2011(3): 29-32. (in Chinese with English abstract)
[9] 王晓东. 水轮式打穴移栽机成穴机理及试验研究[D]. 北京:中国农业大学,2005.
Wang Xiaodong. The Experimental Study on the Water-Wheel Transplanter’s Punching Mechanism[D]. Beijing: China Agricultural University, 2005. (in Chinese with English abstract)
[10] 于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J]. 农业机械学报,2014,45(8):44-53.
Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transsplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese with English abstract)
[11] 王晓东,封俊. 国内外膜上移栽机械化的发展状况[J]. 中国农机化,2005(3):25-28.
Wang Xiaodong, Feng Jun. State and development of transplanting mechanization with mulch film at home andabroad[J]. Chinese Agricultural Mechanization, 2005(3): 25-28. (in Chinese with English abstract)
[12] 韩长杰,徐阳,张静,等. 半自动压缩基质型西瓜钵苗移栽机设计与试验[J]. 农业工程学报,2018,34(13):54-61.
Han Changjie, Xu Yang, Zhang Jing, et al. Design and experiment of semi-automatic transplanter for watermelon seedlings raised on compression substrate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 54-61. (in Chinese with English abstract)
[13] 贾洪雷,王万鹏,陈志,等. 农业机械触土部件优化研究现状与展望[J]. 农业机械学报,2017,48(7):1-13.
Jia Honglei, Wang Wanpeng, Chen Zhi, et al. Research status and prospect of soil-engaging components optimization for agricultural machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 1-13. (in Chinese with English abstract)
[14] 向伟,吴明亮,官春云,等. 履带式油菜苗移栽栽植孔成型机的设计与试验[J]. 农业工程学报,2015,31(15):12-18.
Xiang Wei, Wu Mingliang, Guan Chunyun, et al. Design and experiment of planting hole forming device of crawler transplanter for rape (Brassica napus) seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(15): 12-18. (in Chinese with English abstract)
[15] 陈建能,王伯鸿,张翔,等. 多杆式零速度钵苗移栽机植苗机构运动学模型与参数分析[J]. 农业工程学报,2011,27(9):7-12.
Chen Jianneng, Wang Bohong, Zhang Xiang, et al. Kinematics modeling and characteristic analysis of multi-linkage transplanting mechanism of pot seedling transplanter with zero speed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(9): 7-12. (in Chinese with English abstract)
[16] 黄玉祥,杭程光,苑梦婵,等. 深松土壤扰动行为的离散元仿真与试验[J]. 农业机械学报,2016,47(7):80-88.
Huang Yuxiang, Hang Chengguang, Yuan Mengchan, et al. Discrete element simulation and experiment on disturbance behavior of subsoiling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 80-88. (in Chinese)
[17] 胡国明. 颗粒系统的离散元素法分析仿真[M]. 武汉:武汉理工大学出版社,2010:64-101.
[18] 王国强. 离散单元法及其在EDEM上的实践[M]. 西安:西北工业大学出版社,2010:2-58.
[19] 王燕. 基于离散单元法的深松铲结构与松土效果研究[D]. 长春:吉林农业大学,2014.
Wang Yan. Simultion Analysis of Structure and Effect of the Subsoiler Based on DEM[D]. Changchun: Jilin Agricultural University, 2014. (in Chinese with English abstract)
[20] 王宪良,胡红,王庆杰,等. 基于离散元的土壤模型参数标定方法[J]. 农业机械学报,2017,48(12):78-85.
Wang Xianliang, Hu Hong, Wang Qingjie, et al. Calibration method of soil contact characteristic parameters based on DEM theory[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 48(12): 78-85. (in Chinese with English abstract)
[21] 石林榕,赵武云,孙伟. 基于离散元的西北旱区农田土壤颗粒接触模型和参数标定[J]. 农业工程学报,2017,33(21):181-187.
Shi Linrong, Zhao Wuyun, Sun Wei. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 181-187. (in Chinese with English abstract)
[22] 方会敏,姬长英,Ahmed Ali Tagar,等. 秸秆-土壤-旋耕刀系统中秸秆位移仿真分析[J]. 农业机械学报,2016,47(1):60-67.
Fang Huimin, Ji Changying, Ahmed Ali Tagar, et al. Simulation analysis of straw movement straw-soil-rotary blade system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 60-67. (in Chinese with English abstract)
[23] 方会敏,姬长英,Farman Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28.
Fang Huimin, Ji Changying, Farman Ali Chandio, et al. Analysis of soil dynamic behavior during rotary tillage based on discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese with English abstract)
[24] 王学振,岳斌,高喜杰,等. 深松铲不同翼铲安装高度时土壤扰动行为仿真与试验[J]. 农业机械学报,2018,49(10):124-136.
Wang Xuezhen, Yue Bin, Gao Xijie, et al. Discrete element simulations and experiments of disturbance behavior as affected by mounting height of subsoiler's wing[J]. Transactions of the Chinese Society of Agricultural Machinery, 2018, 49(10): 124-136. (in Chinese with English abstract)
[25] Janda A, Ooi J Y. DEM modeling of cone penetration and unconfined compression in cohesive solids[J]. Powder Technology, 2016, 293: 60-68.
[26] 王超,刘从京,李洪文,等. 非对称式大小圆盘开沟装置设计与试验[J]. 农业工程学报,2018,34(18):28-36.
Wang Chao, Liu Congjing, Li Hongwen, et al. Design and experiment of asymmetric large-small double discs ditching device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 28-36. (in Chinese with English abstract)
[27] 王宪良. 农机作业土壤压实评价及组合铲松土技术研究[D].北京:中国农业大学,2018.
Wang Xianliang. Study on Evaluation of Soil Compaction by Agricultural Tire and Combination Shovel Loose Soil Technology[D]. Beijing: China Agricultural University, 2018. (in Chinese with English abstract)
[28] 高国华,王凯,孙晓娜. 嫁接机钢针顶起穴盘苗过程 EDEM模拟验证及参数优化[J]. 农业工程学报,2017,33(21):29-35.
Gao Guohua, Wang Kai, Sun Xiaona. Verification for EDEM simulation of process of jacking tray-seedling by steel needle ingrafting machine and parameter optimization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 29-35. (in Chinese with English abstract)
[29] 熊平原,杨洲,孙志全,等. 基于离散元法的旋耕刀三向工作阻力仿真分析与试验[J]. 农业工程学报,2018,34(18):113-121.
Xiong Pingyuan, Yang Zhou, Sun Zhiquan, et al. Simulation analysis and experiment for three-axis working resistances of rotary blade based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 113-121. (in Chinese with English abstract)
[30] 邓佳玉,胡军,李庆达,等. 基于 EDEM 离散元法的深松铲仿真与试验研究[J]. 中国农机化学报,2016(4):14-18.
Dong Jiayu, Hu Jun, Li Qingda, et al. Simulation and experimental study on subsoiler based on EDEM discrete element method[J]. Journal of Chinese Agricultural Mechanization, 2016(4): 14-18. (in Chinese with English abstract)
[31] 郑侃,何进,李洪文,等. 基于离散元深松土壤模型的折线破土刃深松铲研究[J]. 农业机械学报,2016,47(9):62-72.
Zheng Kan, He Jin, Li Hongwen, et al. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 62-72. (in Chinese with English abstract)
[32] 祖米来提·吐尔干,林涛,严昌荣,等. 地膜覆盖时间对新疆棉田水热及棉花耗水和产量的影响[J].农业工程学报,2018,34(11):113-120.
Zumilaiti Tuergan, Lin Tao, Yan Changrong, et al. Effect of plastic film mulching duration on soil temperature and moisture in field and cotton water comsumption and yield in Xinjiang[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 113-120. (in Chinese with English abstract)
[33] 李井云,李建波,李颖慧,等. 地膜覆盖西瓜套种地瓜栽培技术[J]. 吉林蔬菜,2018(合刊2):19-20.
[34] 陈建能,黄前泽,王英,等. 钵苗移栽机椭圆齿轮行星系植苗机构运动学建模与分析[J]. 农业工程学报,2012,28(5):6-12.
Chen Jianneng, Huang Qianze, Wang Ying, et al. Kinematics modeling and analysis of transplanting mechanism with planetary elliptic gears for pot seedling transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(5): 6-12. (in Chinese with English abstract)
Parameter optimization of opener of semi-automatic transplanter for watermelon seedlings raised on compression substrate
Han Changjie, Xu Yang, You Jia, Zhang Jing, Yuan Panpan
(,,830052,)
Aiming at the problems of the poor quality of the hole shape formed by the transplanter will cause the seeding to tilt, when watermelon seedlings raised on pie-shaped compression substrate for transplanting. Opener parameters of hole-forming device in semi-automatic transplanter for watermelon seedlings raised on compression substrate is optimized to meet the agronomic requirements of transplanting compression substrate watermelon seedling and combining the characteristics of dryland transplanting machinery. Through analyzing the movement mechanism of the opener, this paper established the parameter equation of the planting hole. It was concluded that the depth of the hole-forming was the main factor affecting the longitudinal length of the upper part of the hole mouth. The Edinburgh Elasto-Plastic Cohesion Model, which can reflect the elastoplasticity and cohesiveness of soil. The simulation analysis of the hole-forming process of the opener was carried out by using the discrete element method. The rationality of the structure parameters and motion parameters of the opener was verified, and the hole-forming effect of different diameters of the small end of opener was explored at different theoretical depth of hole-forming. According to the simulation results, the diameter of the small end of opener was 60 mm and the theoretical depth of hole-forming was 65 mm. The bottom of the hole was relatively flat, effective depth of hole-forming was 51 mm. The upper longitudinal length of hole and the upper width of hole were relatively small. It was conducive to the growth of coated transplanted crops. In order to verify the accuracy of the above design method and the reliability of the operation of the hole-forming device, a prototype and 3 sets of opener with different small end diameters were trial-manufactured to carry out field experiments, and the upper longitudinal length of hole, upper width of hole and effective depth of hole-forming were measured. The results of the experiment combined with the simulation analysis showed that the upper longitudinal length of hole and the upper width of hole were increased with the increase of the theoretical depth of hole-forming. The upper longitudinal length of hole and the upper width of hole increased with the increase of the diameter of the small end of the opener. The influence of the diameter change of the small end of the opener on the upper longitudinal length of hole was weaker than the change of theoretical depth of hole-forming. The theoretical depth of hole-forming had a significant effect on the upper longitudinal length of hole. The larger the diameter of the small end of the opener, the more the upper width of hole increased as the theoretical depth of hole-forming. The minimum error between simulation result and the test result of upper longitudinal length of hole was 0.34%, the maximum was 12.78%, and the average error was 6.7%. The minimum error between the simulation result and test result of the upper width of hole was 7.23%, maximum was 20.87%, and average error was 12.33%. The minimum error between effective depth of hole-forming simulation results and test results was 1.79%, the maximum was 17.92%, and the average error was 10.46%. The research can provide a reference for the optimization and improvement of the opener.
mechanization; transplants; optimization; opener; discrete element
2019-03-04
2019-05-15
国家自然科学基金项目(51565059);“十三五”国家重点研发计划(2017YFD0700803-2);自治区重点研发计划(2018B01001-3);自治区研究生科研创新项目(XJGRI2017-074)
韩长杰,副教授,博士,主要从事农业机械设计与智能农业装备的研究。Email:hcj_627@163.com
10.11975/j.issn.1002-6819.2019.11.006
S223.92
A
1002-6819(2019)-11-0048-09
韩长杰,徐 阳,尤 佳,张 静,袁盼盼. 半自动压缩基质型西瓜钵苗移栽机成穴器参数优化[J]. 农业工程学报,2019,35(11):48-56. doi:10.11975/j.issn.1002-6819.2019.11.006 http://www.tcsae.org
Han Changjie, Xu Yang, You Jia, Zhang Jing, Yuan Panpan. Parameter optimization of opener of semi-automatic transplanter for watermelon seedlings raised on compression substrate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 48-56. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.11.006 http://www.tcsae.org
