弯道制动工况下车辆参数估计
2019-07-22谭子胡龚贤武刘峰云高齐赵轩
谭子胡,龚贤武,刘峰云,高齐,赵轩
(1.长安大学汽车学院,陕西 西安 710064;2.长安大学电控学院,陕西 西安 710064;3.长城汽车股份有限公司,河北 保定 071000)
随着电动汽车的发展,驱动电机的冗余控制使汽车在驱动力矩的分配方案上具有可控性.根据单个驱动电机的力矩反馈信号能估算出驱动轮的驱/制动力[1],相对于传统车参数估计模型而言,用准确的输入量代替未知参数,进一步提高了参数估计模型的估计精度.
随着高精度GPS的应用,信息融合的方法得到广泛运用,通过载体姿态测量的方法直接获得车辆的横摆角或质心侧偏角[2].纵向车速、横摆角速度、质心侧偏角、纵向加速度以及侧向加速度可通过不同的传感器配置方案来测量与修正[3].这些能准确测量的参数可以作为参数估计模型的参考量,从而简化参数估计模型和提高估计精度.
轮胎作为车身与路面的载体,准确估计车轮作用力,能提前预测车辆的运动状态和控制车辆.其中,轮胎侧向力是影响车辆横向稳定性的关键因素,对车辆的操纵稳定性具有重要意义[4].如何提出简单又相对准确的模型来估计车轮作用力和其它参数,成为研究的焦点.国内外学者提出了不同的车辆参数估计模型对侧向力进行估计,但未考虑制动下从动轮的制动力作用.
Katriniok等[5]将经验轮胎公式引进模型的状态方程中,使状态方程离算化变得困难,计算量大.Doumiati和Baffet等[6-7]忽略从动轮纵向力,将驱动力之和作为估计量,利用扩展开卡尔曼滤波算法估计侧向力,曲线拟合程度较高,但在峰值处误差较大.Doumiati等[8]利用扩展卡尔曼滤波算法对侧倾时垂直载荷进行估计,然后再对侧向力进行估计,但未考虑车辆制动状态下从动轮的制动力作用.
在国内,大多文献以四轮驱动车辆为研究对象,未考虑后轴驱动车辆从动轮的制动力对车辆稳定性的影响[9-11].解少博等[12]采用UKF滤波器对23个参数进行估计,将前轮纵向力也作为估计量,但计算量大,噪声参数不易调节.
在Doumiati和Baffet[6-8],都采用松弛轮胎模型,将松弛长度作为常数,然而松弛长度不易测量.在Vantsevich等[13]中指出,松弛长度随垂直载荷与速度的变化而变化,Maurice[14]指出松弛长度随着侧偏角的大小而变化.因此,如何取松弛长度初值以及将松弛长度作为常数对车辆参数模型有什么影响,需要进一步观测与验证.
上述文献中,忽略了从动轮的纵向力对车辆稳定性的影响;进行车轮驱动力比例分配时存在较大误差,同时没有考虑弯道制动工况下参数的估计效果;将松弛长度作为常数,未验证参考值的准确性.然而,在制动过程中从动轮的制动力对车辆影响比较大,在制动工况下忽略从动轮制动力会带来较大误差.针对以上问题,本文提出了基于UKF的前轮转向后轮驱动的电动车车辆参数估计模型,将驱动轮的驱/制动力作为已知量,减少驱动轮纵向力分配误差;考虑从动轮的制动力对车辆稳定性的影响;将松弛长度作为状态量,分析松弛长度对侧偏力的影响,在此基础上调节松弛长度初值.最后,通过弯道制动双移线工况和高速匀速双移线工况来验证观测器的合理性.
1 动力学模型
1.1 车辆模型
七自由度的整车模型是研究四轮汽车动力学常用的模型[15-16],如图1所示.车辆模型为前轮转向、后轮驱动的双轨道车辆模型,忽略车轮的滚动阻力、空气阻力的影响,包含纵向运动、侧向运动、横摆运动和车轮的滚动运动.
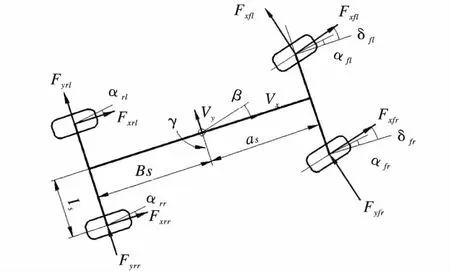
图1 后轮驱动的七自由度整车模型Figure1 The seven freedom degrees of rear drive vehicle model
根据模型建立x、y、z3个方向上的方程组,车辆质心纵向加速度、侧向加速度、横摆力矩方程、运动学方程、车轮侧偏角及车轮垂直载荷方程分别为:
ax=(Fxflcosδfl+Fxfrcosδfr-
Fyflsinδfl-Fyfrsinδfr+Fxrl+
Fxrr)/m
(1)
ay=(Fxflsinδfl+Fxfrsinδfr+
Fyflcosδfl+Fyfrcosδfr+Fyrl+
Fyrr)/m
(2)
Mz=ls(Fxflcosδfl+Fxfrcosδfr-
Fyflsinδfl-Fyfrsinδfr+Fxrr-
Fxrl)+as(Fyflccosδfl+
Fyfrcosδfr+Fxflsinδfr+
Fxfrsinfr)-bs(Fyrt+Fyrr)
(3)
(4)
(5)
(6)
式中:ax为纵向加速度,ay为侧向加速度,Mz为横摆力矩,Fxfl、Fxfr、Fxrl、Fxrr分别为左前轮、右前轮、左后轮、右后轮纵向力,Fyfl、Fyfr、Fyrl、Fyrr分别为左前轮、右前轮、左后轮、右后轮侧向力,δfl、δfr为左前轮、右前轮转角.
(7)
(8)
式中:αfl、αfr、αrl、αrr分别为左前轮、右前轮、左后轮、右后轮侧偏角,vx、vy、γ分别为纵向速度、侧向速度和绕z轴的横摆角速度.FZfl、FZfr、FZrl、FZrr为车轮的垂直载荷,ax和ay分别为纵向加速度和侧向加速度,hg为质心高度.
1.2 从动轮制动力估计
车辆为前置后驱电动车,从动轮纵向力可以根据dugoff轮胎模型计算出,驱动轮纵向力可以通过电机反馈信号及液压制动力矩信号来获取,数值更加准确.Dugoff轮胎纵向力表达式如下:
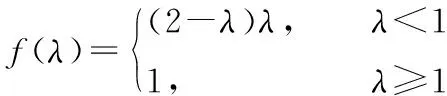
(9)
式中,λ表示纵向滑移率,Cy表示轮胎侧偏刚度,Cx表示轮胎纵向刚度,α表示轮胎侧偏角,μ为路面附着系数,ε为速度影响系数,是一个与轮胎结构和材料有关的参数,它可以修正车轮滑移速度对轮胎力的影响[17].
2 状态观测器设计
2.1 松弛轮胎模型
为了提高侧向力的估计精度,观测器单独考虑每个轮胎的侧向力,引入松弛轮胎模型[18],其定义如下:
(10)

在dugoff原始轮胎模型中,侧偏刚度为不受垂直载荷转移影响的常数.根据文献[8]表明,轮胎垂直载荷转移对侧偏刚度系数有较大的影响,变化的垂直载荷可以表达成关于垂直载荷的多项式.将侧偏刚度拟合成关于垂直载荷的多项式,最终的线性拟合公式为:
Cyij(x)=0.001 214x2-15.34x-2 550
(11)
2.2 基于UKF的车辆参数模型设计
由纵向速度、侧向速度、横摆率、侧向力和松弛长度构成状态向量如下:


由转向角、纵向力、侧向力近似值构成控制向量如下:

由纵向加速度、侧向加速度、横摆率和后轴平均速度(后轴各轮的速度可以通过速度传感器测出)构成观测向量如下:

为了估计前后轴松弛长度,引入状态模型如下:
(12)
将状态向量和控制向量带入到公式(4)、(5)、(6)、(10)、(12)中,构成状态方程如下:
f1=[(u2+u3)cosu1-(x4+x5)sinu1+u4+u5]/m+x2x3
f2=[(u2+u3)sinu1-(x4+x5)cosu1+x6+x7]/m-x1x3
f3={l5[(-u2+u3)cosu1+(x4-x5)×
sinu1+x4-x5]+as((x4+x5)×
cosu1+(u2+u3)sinu1)-bs(x6+x7)}/Jz
f6=0
f7=0
(13)
将后轴平均速度作为观测量,后轴速度可以通过车轮上速度传感器获得,并与公式(1)、(2)、(6)构成观测方程组:
(14)
3 UKF原理
无迹卡尔曼滤波器采用不敏变换,可以将估计参数的均值和协方差向真值逼近到三阶,精度与二阶的泰勒级数一致,比扩展卡尔曼滤波器(extended kalman filter,EKF)线性化误差更小一些[19].UKF观测器设计如下:
(1) 采样点权值:
(15)
(2) 状态更新状态:
(16)
(3) 向前一步预测方差:
(17)
(4) 观测预测方程:
(18)
(5) 滤波器增益:
(19)
(6)状态估计方差:
P(k+1|k+1)=P(k|k+1)-K(k)Pz×KT(k)
(20)
在2次试验中,将α=0.001,β=2,n=9,路面附着系数μ=0.85,纵向初始速度值与试验一致,其它变量设置较小的任意值.2次试验变量的初值为x0=[21 0 0 0 0 0 0 0.4 0.4]T,模型过程噪声和测量噪声对估计结果有重要影响,取
Qm=diag[10^(-7),10^(-7),10^(-7),10^-6,10^-6,10^-6,10^-6,10^(-7),10^(-7)]′;Qs=diag[0.9,0.9,10^(-3),1]′,状态初始协方差为P0=I9*9的单位矩阵.
4 试验验证与分析
Carsim软件是专门针对车辆动力学的仿真软件,被广泛地应用于现代汽车控制系统的开发[20].本文采用在Simulink环境中搭建参数估计模型,在Carsim仿真软件中模拟驾驶环境,2个软件之间进行参数输入与输出,如图2所示.
由上述可知,在该试验中纵向驱/制动力为已知量.从图3可以看出,弯道制动双移线试验中从动轮制动力(前轴)在制动过程中比较大,甚至出现峰值,因此从动轮的制动力对车辆的稳定性有很大的影响.

图2 基于Matlab/Simulink与Carsim联合仿真平台Figure 2 The simlink platform based on the co-simulation Matlab/Simulink and Carsim
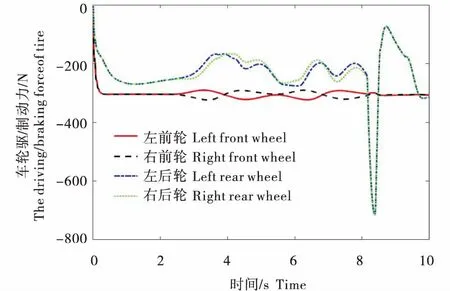
图3 车轮驱/制动力Figure 3 The driving /braking force of tire
4.1 弯道制动双移线试验
为了验证观测器在弯道制动工况下的稳定性与准确性,选取典型双移线工况,初始速度为80 km/h,地面摩擦系数为0.85,以匀减速进行试验.图4为车辆质心位置的3个参数估计曲线,从图中可以看出,质心纵向速度和横摆率的估计值与参考值接近100%重合,侧向速度存在偏差.
侧向速度的估计值产生偏差的原因:纵向速度远大于侧向速度,接近100倍,而侧向速度估计方程是关于纵向速度的函数,因此,过小的侧向速度,在计算过程中产生累计误差;另一方面,观测方程中纵向加速度为近似值,忽略横摆率的影响,进一步增加了误差;待估计的纵向力与侧向速度的绝对值大小而言,侧向速度值更小,在综合UKF增益的作用下,进一步增加了侧向速度误差.
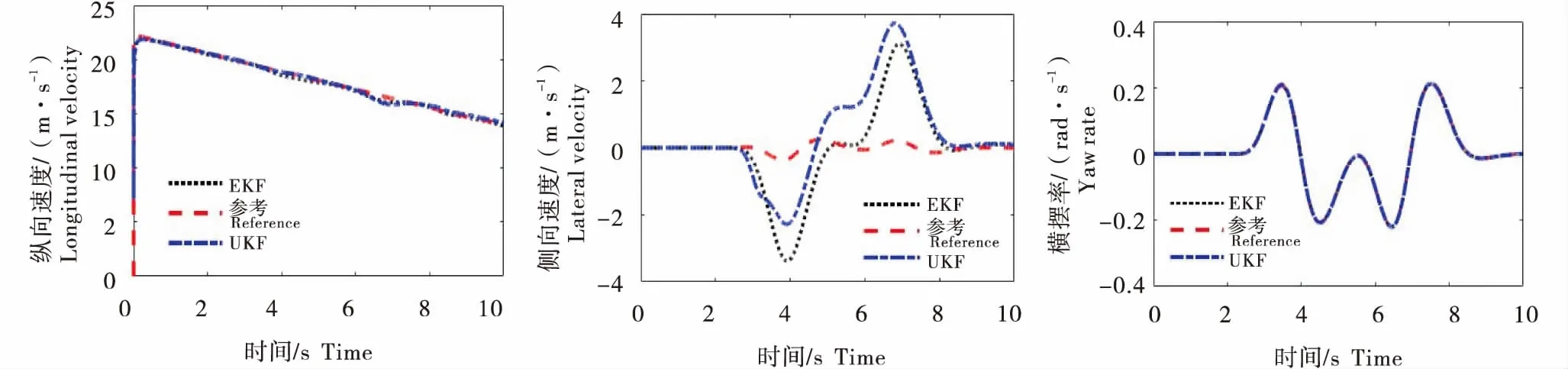
图4 弯道制动工况下车辆质心参数估计结果Figure 4 Estimated parameters of gravity center under streering and braking condition
从图5可知,侧向力的估计值与参考值完全重合,说明设计的观测器能准确的估计弯道制动工况下的侧向力,松弛长度能更好地体现轮胎的侧向动力学特性.
从图6可知,EKF观测器中松弛长度变化不大,可以当作常数,初值大小对观测器的影响不大;而在UKF观测器中,先出现峰值再向初值靠近,是一个动态变化的过程.出现峰值的原因是在峰值点处,车辆正处于转弯过程中,侧偏力突然增大,存在动态调节的过程.观测器动态调节松弛长度的过程,更能体现轮胎侧向特性变化.
4.2 高速弯道双移线试验
车辆在高速运动时对参数估计模型的稳定性较高,为了更好的验证观测器的稳定性与准确性,选取典型高速双移线工况,初始速度为80 km/h,地面摩擦系数为0.85,以恒定速度进行试验,行驶过程不进行减速.
从图7~9可知,纵向速度、横摆率、车轮侧向力的估计值与参考值接近100%重合;当车辆在转弯时,侧向加速度接近0.4g时,侧向力估计值仍能与参考值吻合;侧向速度与松弛长度的变化规律与弯道制动工况下的变化规律一样,试验结果表明该观测器在高速时也具有较好的观测效果.图7可知,当车辆高速行驶时,侧向速度变化比弯道制动工况下估计值波动大,这是因为车辆在弯道高速行驶时,车辆横摆力矩变化大,导致侧向速度波动大.
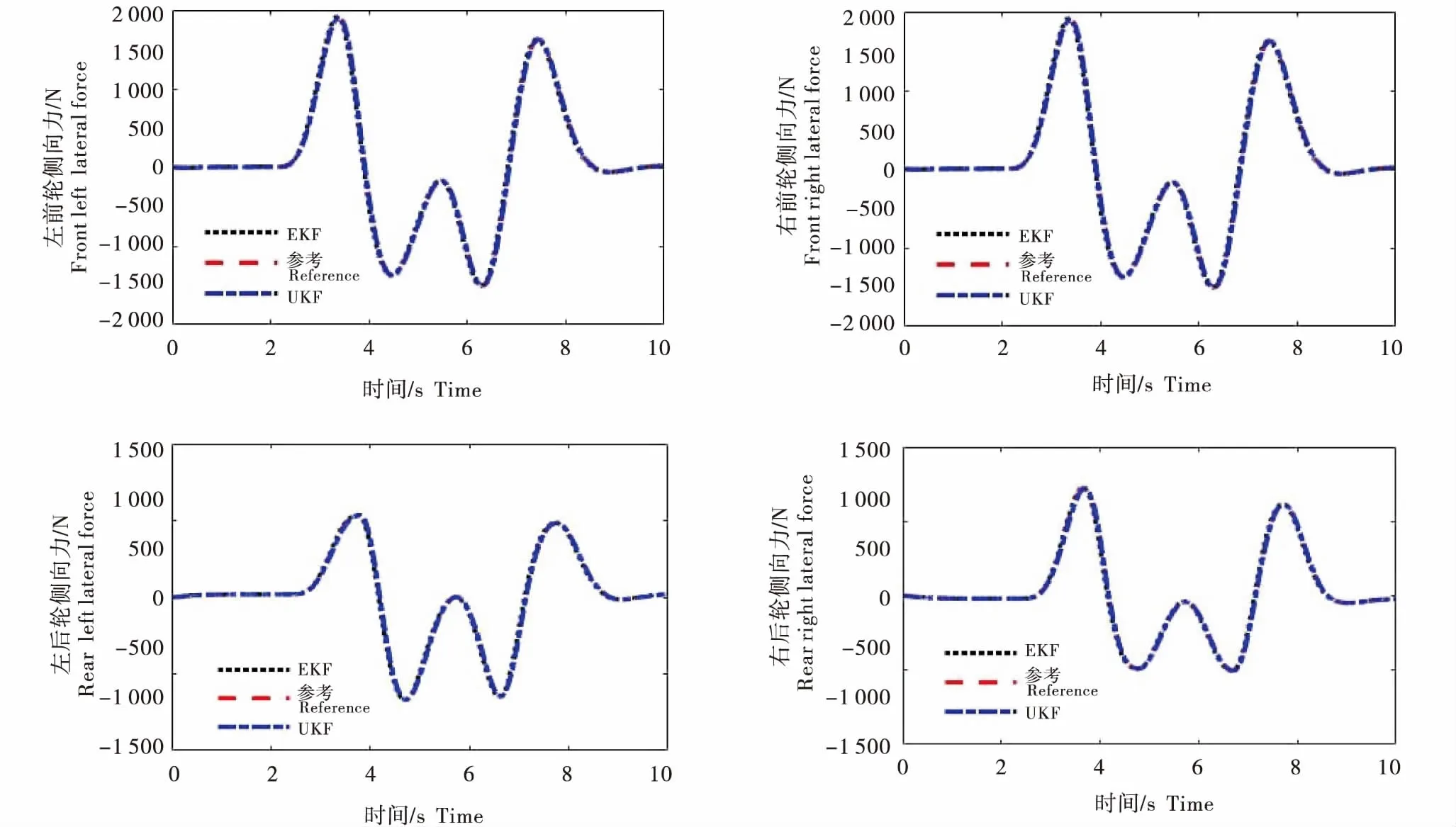
图5 弯道制动工况下侧向力估计结果Figure 5 Estimation of lateral forces under streering and braking condition

图6 弯道制动工况下松弛长度估计结果Figure 6 Estimation of relaxation length under streering and braking condition
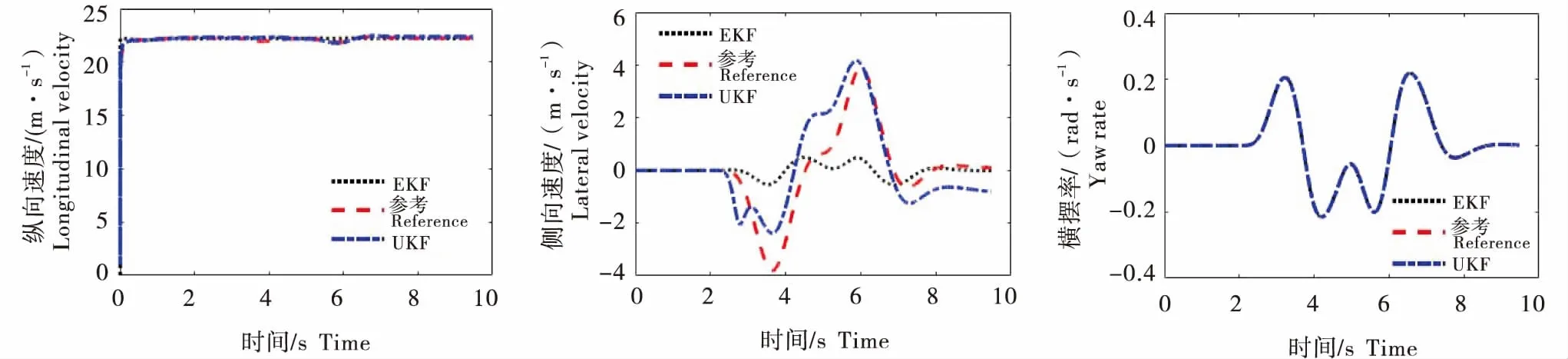
图7 高速弯道工况下车辆质心参数估计结果Figure 7 Estimated parameters of gravity center under streering and high speed condition
图8 高速弯道工况下侧向力估计结果Figure 8 Estimation of lateral forces under streering and high speed condition

图9 高速弯道工况下松弛长度估计结果Figure 9 Estimation of relaxation length under streering and high speed condition
5 结论
在设计前轮转向后轮驱动的电动汽车参数估计模型时,将驱动轮的驱/制动力作为已知状态量,能有效避免驱动力分配误差;考虑从动轮的纵向力,更能体现制动过程车辆的受力状况.
在EKF观测器中,松弛长度变化不大,可以当作常数;在UKF观测器中,松弛长度在初始调节过程中出现波峰,但很快接近初值.将松弛长度作为状态量,能根据估计效果调整初值,同时也能体现车轮的侧向动力学特性,提高侧向力的估计精度.
通过弯道制动双移线实验和弯道高速恒速双移线试验,试验结果表明,设计的观测器能有效地观测车辆在制动和高速工况下的状态参数.
