一种大气能见度光电测量系统半自动定标方法
2019-07-22李兵舰
李兵舰,杨 帆
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
大气能见度是重要的气象因素,对公路交通、航空航海、水文、森林、机场等地的气象监测都有着一定的影响。自1957年Koshmieder定律建立以来,各种大气能见度仪应运而生,大量投入到实际应用中[1]。目前国际上的大气能见度仪器主要有透射式能见度仪、前向散射式能见度仪、激光雷达等。
常规的能见度仪定标方法有工作母机传递法、标准仪器标校法和自我标校法。工作母机传递法是先由专业的能见度观测员提供当前能见度的真实值,再依照此真实值选择一台性能稳定、测量精度高的能见度仪作为工作母机进行定标,然后再通过工作母机提供的能见度实时测量数据对能见度仪器进行实时定标。该方法的缺点在于很难保证工作母机自身的测量精度,另外也存在着较大的人为因素产生的误差。使用此方法给能见度仪定标的厂家以洛阳凯迈测控有限公司为代表,其生产的CJY-1C型前向散射式能见度仪对能见度的监测较为稳定,常用于我国的民用机场和高速公路上[2]。使用标准仪器标校法定标的代表仪器是锦州阳光气象有限公司的NJD-1型前向散射式能见度仪。该定标方法使用堵光板模拟高能见度的测量,使用校准板模拟低能见度的情况,并且一般在高能见度和低能见度处抽查。此方法的不足之处为用于校准的散射标准器基于散射仪制作,所测的能见度数据和真实值之间存在转换误差。自我标校法的使用以芬兰VAISALA公司为代表,该公司的LT31型透射式能见度仪广泛应用于我国的机场等地,其集成了透射仪和散射仪[3]。由于透射仪测量低能见度时精度较高,而散射仪测量高能见度时有较好的测量精度,在定标时二者可以互为对方提供标校数据。该方法存在的问题是当透射仪或散射仪自身测量基准存在偏差时,再用于给对方标校就会出现误差,并且散射仪测量精度本来就低于透射仪,用散射仪给透射仪定标本来就有不合理之处。
目前国际上透射仪的定标大都采用人工外挂校准片的方法进行[4]。但是这种定标方法难以保证校准精度,容易受到人为因素的影响而造成误差,并且定标操作麻烦,维护成本高。为了克服这些问题,本文为所设计的能见度光电测量系统专门提出了一套半自动定标系统用于仪器定标。
1 光电测量系统
本文的大气能见度光电测量系统由光学发射模块、光学接收模块、仪器控制模块和数据处理模块四部分组成,系统结构图如图 1所示。样机采用双端式探测方式,发射端和接收端分开放置。

图1 系统结构图
系统在外场工作时,光学发射模块中的激光光源发出波长为620 nm的激光,经过斩波器和准直透镜组后从发射窗口出射后,由于受到空气中气溶胶粒子的影响,会发生散射、吸收等光学效应,使得光束到达接收端后会发生一定的衰减。这种衰减与大气消光系数有关,大气能见度通过公式可以用消光系数求得。光束到达光学接收模块后,由接收透镜组汇聚,经过滤光片将其他波长的光进行衰减,由光检测器探测并且将光信号转化为电信号传至后端处理。仪器控制模块主要有控制电源、自动光功率控制电路和光源驱动电路等组成,主要用于整个系统的控制。数据处理模块由信号处理、数据处理和显示模块等组成,在接收到由光检测器传来的电信号后,将信号经过A/D转换,再传至数据处理进行计算,最后将测量结果在显示模块显示。由于光学镜头极易受到空气灰尘等的污染,光学发射单元和光学接收单元都安装有窗口镜用于防护。
2 定标原理
近些年来,世界气象组织(WMO)建议使用气象光学距离(MOR)为核心来阐述能见度的观测[5]。气象光学距离是指由白炽灯发出的色温为2 700 K的平行光束的光通量在大气中削弱至初始值的5%所经过的距离[6]:
(1)
式中:σ为消光系数;ε为视觉对比阈值,根据国际气象组织的规定,ε=0.05[7]。
由Lambert-Bouguer定律,平行光在大气中的衰减可表示为:
T=e-σL
(2)
式中:T为透过率;L为基线长度。
若令C=-ln0.05,结合式(1)和式(2)可得消光系数和大气能见度之间的关系为:
(3)
在能见度校准时,若给定校准时的能见度真值为M0,那么校准时大气的透射率因子真值为:
(4)
若校准时给定的能见度标准值为M1,则可以得到实际校准时的透射率因子标准值为:
(5)
综上,由式(4)和式(5)可得校准后透射因子的偏差比例系数为:
(6)
校准完成后,在实际测量能见度真值为M的能见度时,由于校准时给定的标准值的误差,相应的透射因子也会存在一定比例的误差,则实际测量的透射因子为:
(7)
由式(2)和式(7)可得测得的大气消光系数为:
(8)
由式(1)和式(8)可得测得的能见度为:
(9)
根据误差理论,测量误差为:
(10)
令校准误差为:
(11)
则:
(12)
3 定标方法及流程
大气能见度测量的定标是选择不同透过率的3个滤光片来模拟不同能见度条件下的测量结果。如图2所示,定标装置由定标圆盘、支撑杆和基座组成。定标圆盘有4个档位,其传动通过手动控制,正常测量时采用档位0。档位1、2、3分别放置透过率为0.9、0.5和0.1的滤光片用于仪器定标。

图2 定标系统的结构图
系统校准时,选择天气情况良好、能见度较好的时候,先使系统正常工作半小时以上,首先调至档位1,输入给定的标准值,待能见度示数稳定后更换另一档位,重复操作直至3个档位定标完成。定标完成时,定标装置会被移动到观测站中,正常测量时不会用到。大气能见度的定标需要得到一个用于定标的能见度真值,通常由专门的气象人员给出。本文定标系统的优点在于人工旋转校准盘自动完成校准,操作简单,并且能见度校准系统询问是否校标的指标即为测量的能见度,因此校准的条件有保证。另外,本文测量仪器的定标装置不需要专门人员来维护。
图3为能见度定标流程图,其中校准阈值R0与校准值的稳定阈值a均由人为设定。目前,根据经验及国外生产厂家的建议,大多要求R0在10 km~15 km。查询到校准在对应标准值的±10%以内时,即可认为完成相应透过率点的校准。
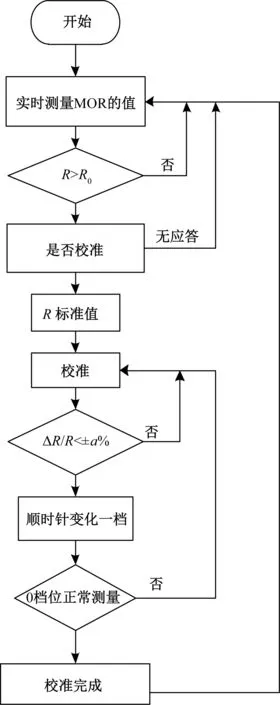
图3 定标流程图
4 测量结果和比较
定标实验中,使用3个定标档位:20∶00~21∶00使用档位1,其校准镜片透过率为0.9;21∶00~22∶00使用档位2,其校准镜透过率为0.5;22∶00~23∶00使用档位3,其校准镜片透过率为0.1。能见度的定标结果显示在图4中。图中横坐标表示时间,纵坐标为大气能见度,单位是km。如图4所示,档位1的相对偏差σ1=2%,档位2的相对偏差σ2=1.9%,档位3的相对偏差σ3=1.7%。由于3个档位的相对偏差均在标准值的10%以内,校准完成。

图4 定标结果图
5 结束语
本文提出了一种大气能见度光电测量系统半自动定标方法,避免了传统透射仪定标时人工替换校准片的繁琐步骤,具有操作简单、校准条件有保证等特点。本文首先从大气能见度定标原理出发,从理论上研究了大气能见度定标方法。然后根据定标原理设计了定标方案,并制定了定标流程。最后进行了大气能见度定标试验,并对测量结果进行了分析。定标结果表明本文定标系统定标结果相对偏差较小,能够完成透射式能见度仪的定标。
