可控便携式汽车移动机器人设计*
2019-07-22马登秋郑红建李馨婷叶振环
马登秋,郑红建,李 飞,卢 超,蒋 兵,陈 派,李馨婷,叶振环
(1.遵义师范学院 工学院,贵州 遵义 563006;2.贵州天义电器有限责任公司,贵州 遵义 563000)
1 引言
随着社会进程的发展,科技水平逐渐提高,人们的生活和生产水平也越来越高,汽车也成为人们出行的主要代步工具。据有关资料显示:2017年,中国汽车产量达2 901.54万辆,同比增长3.19%;销量达2 887.89万辆,同比增长3.04%[1]。由于城市汽车数量的迅速增加,各种各样的交通问题也随之而来。例如,上下班和节假日期间车流量极大,造成交通拥堵;车辆的乱停乱放问题严重,不仅影响城市的文明形象,也影响市民出行,甚至可能会引起交通事故等[2]。为了解决汽车乱停乱放的问题,设计制作了汽车移动机器人,它具有体积较小、操作简单、便于移动等优点。
2 可控便携式汽车移动机器人设计方案
可便携式汽车移动机器人简易结构如图1所示。
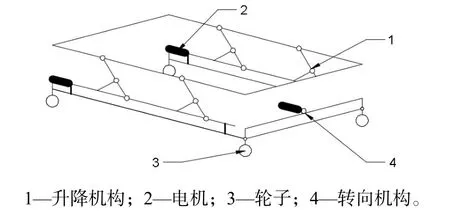
图1 可便携式汽车移动机器人简图
可控便携式汽车移动机器人可以不借助汽车动力移动汽车,分为结构部分和驱动控制部分。在结构上主要由转向机构、升降机构和驱动机构三大部分组成,其各部件主要功能是:升降机构把汽车与地面分离;驱动机构把汽车移动;转向机构实现转向功能,各机械结构在驱动控制部分的作用下运行。
3 可控便携式汽车移动机器人结构设计
3.1 转向机构设计
对于转向机构,一般基于汽车转向机构设计,但因可控便携式汽车移动机器人趋于微型化,无论是结构特征还是使用要求等都与汽车的转向机构存在差异[3],所以汽车转向机构并不能完全适应于汽车移动机器人,可控便携式汽车移动机器人转向机构需要进行一定的改进。本设计提出两种转向方案:①摇杆式转向机构,具体如图2所示,该机构通过电机正反转驱动摇杆摆动,带动轮子摆动,从而实现转向的功能;②齿条转向机构,具体如图3所示,齿轮齿条机构是通过电机的正转和反转作用于齿条2,使得齿条左右移动,从而引动其他基本杆件运动,进而带动轮子摆动,实现转向的功能。由于摇杆机构摆动具有不确定性、可靠性低等特点,而齿轮传动效率高、可靠,所以,可控便携式汽车移动机器人转向机构采用齿轮齿条机构。
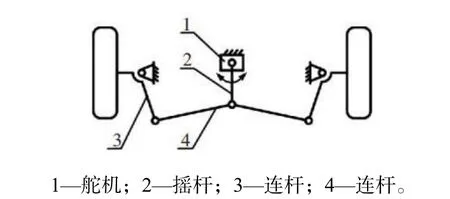
图2 摇杆转向机构简图
3.2 升降机构设计
目前,常见的升降机构有液压杆式升降机构、丝杠式升降机构和链条式升降机构[4]。便携式汽车移动机器人作为一种微型移动工具,升降机构不能过大,否则会影响灵动性和便携性。由此汽车移动机器人升降机构便排除了液压杆式升降结构和钢丝绳式升降结构这两种较大的升降机构,可控便携式汽车移动机器人升降机构采用丝杆式升降机构。
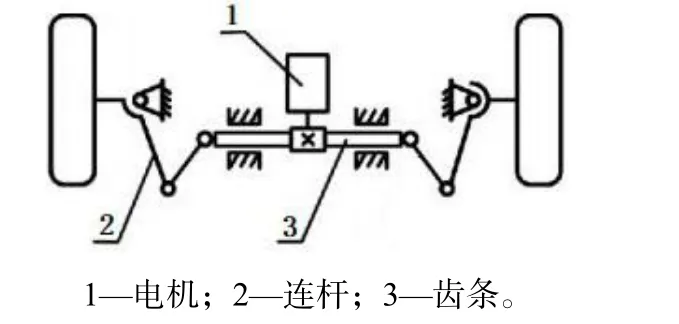
图3 齿条转向机构简图
丝杆式机构如图4所示,四杆承重机构后面的短杆可以打开,使其进入汽车轮胎底部,对汽车进行升降处理;箱体机构中的电机带动螺纹杆,与螺纹杆升降机构的其他四杆进行联动,机构其中两机械点以左右移动来实现四杆承重机构的升降,即可实现汽车的升降;轮系机构可以在一定程度不平整的路面移动,且没在升起汽车时,轮系保持不动并自锁。
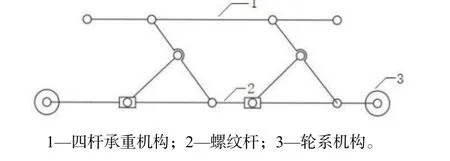
图4 丝杆式机构简图
3.3 驱动机构设计
可控便携式汽车移动机器人有多种驱动方案供选择,比如,特殊移动机器人的同步转向四轮驱动、常见汽车的前轮转向后轮驱动等[5]。由于便携式汽车移动机器人是作为微型机器人来设计,它的体积结构较小,如果让转向和驱动都同时存在,需要考虑特殊的机械结构。所以,可控便携式汽车移动机器人将驱动机构分为主动组和从动组,分别对应汽车的前轮和后轮。主动组由两个汽车移动机器人构成,可以同时完成驱动和转向,移动汽车时分别装载在汽车的两个前轮,转向由转向机构控制,驱动部分采用轮毂电机作为驱动动力源;从动组也由两个汽车移动机器人构成,但从动组轮系是简单的万向轮机构,用来辅助移动,移动汽车时分别装载在汽车的两个后轮。
根据机器人转向机构、升降机构和驱动机构的设计确定机器人各零部件具体尺寸,并对各个零部件进行绘制,可控便携式汽车移动机器人三维模型与爆炸图如图5所示。

图5 可控便携式汽车移动机器人
3.4 控制系统设计
在可便携式汽车移动机器人的设计中,要使汽车移动机器人各个部分之间相互紧密配合,需要相关程序来控制,即汽车移动机器人的控制系统。可控便携式汽车移动机器人控制系统由单片机系统控制,机器人控制程序设计分为通讯模块程序和控制模块程序。机器人控制系统工作基本流程如图6所示。在机器人电源接通后,首先判断脱扣部分是否锁紧,未锁紧的情况下通过通讯模块输出“脱扣未锁紧”,脱扣锁紧后方可驱动升降电机;在机器人移动之前判断升降是否完成,升降未完成的情况下通过通讯模块输出“升降未完成”,升降完成后方可驱动移动或转向电机,等到达运送目的地之后即可完成机器人移动;把汽车放下,完成汽车的移动。
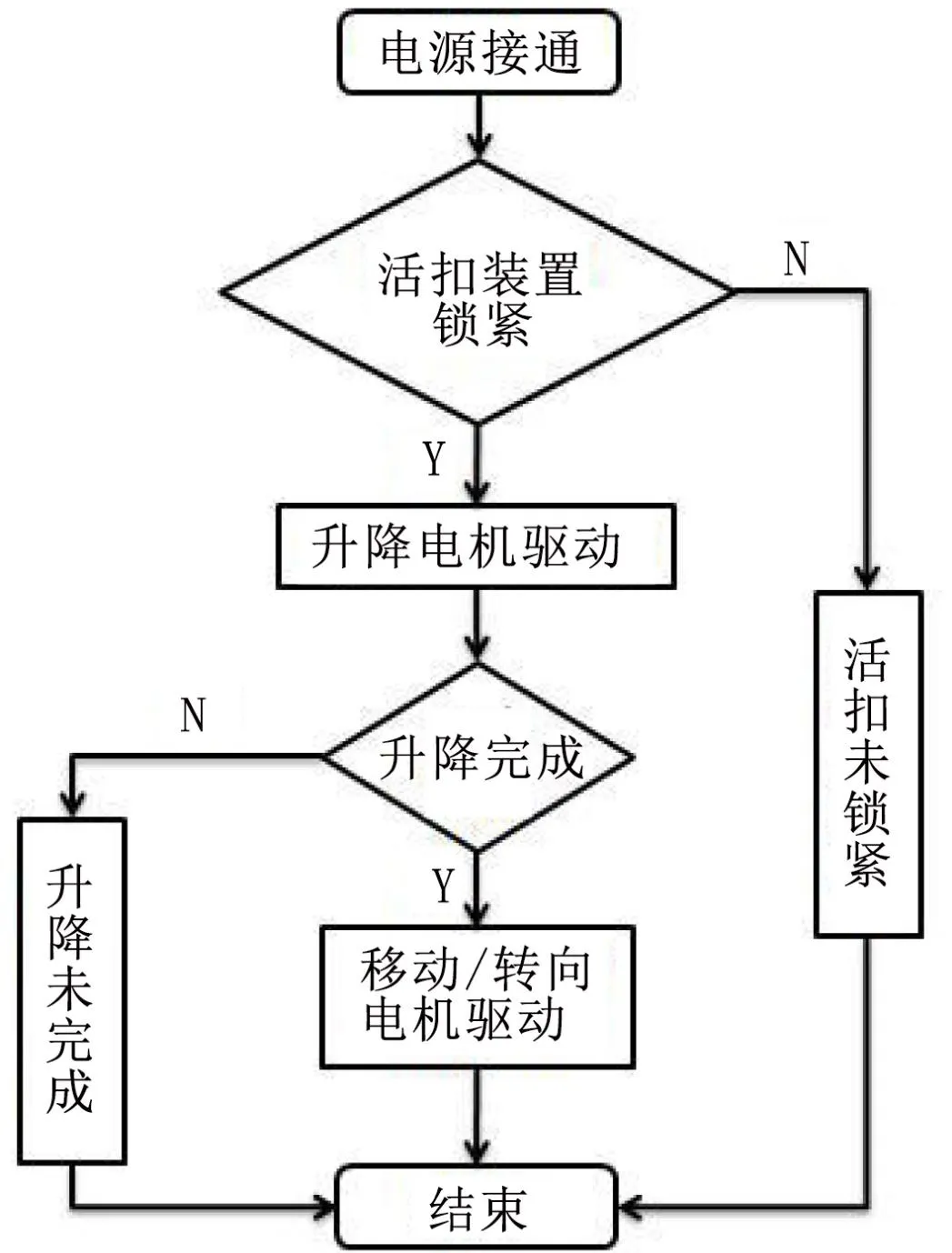
图6 控制系统流程图
4 结语
目前,汽车成为人们出行的主要代步工具,汽车不文明停放问题突出,为了规范不文明停放车辆的行为,开发出了可控便携式汽车移动机器人,分为结构部分和驱动控制部分,其中结构由转向机构、升降机构和驱动机构组成。在出现乱停乱放现或急需移动汽车时,机器人可不借助汽车自身动力或者大型拖车解决相关问题,该可控便携式汽车移动机器人可为交通管控等提供极大的帮助。
