地面合成孔径雷达与三维激光扫描集成技术在大坝监测中的应用
2019-07-18纪志刚洪琲琲
□文/纪志刚 洪琲琲
近年来,遥感技术研究不断深入,两种典型的遥感技术——地面合成孔径雷达和三维激光扫描技术,各有特点:地面合成孔径雷达精度高;三维激光扫描是三维视图,更直观。大坝一直是我国重要的防洪、发电和灌溉设施,需要采用必要的手段对大坝进行监测,而传统的监测手段已不能适应工程发展的要求,本文旨在将二种技术相结合应用于大坝变形监测,充分利用三维激光扫描技术三维可视化特性和地面合成孔径雷达的高精度特性,使二者相互补充,以达到三维方式高精度展示工程表面形变的目的。
1 地面合成孔径雷达和三维激光雷达扫描数据的配准
地面合成孔径雷达图像坐标系统[1]见图1。
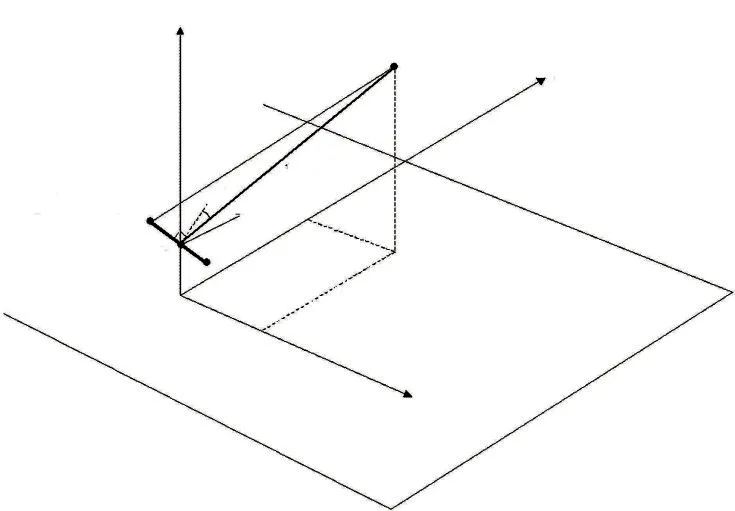
图1 地面合成孔径雷达坐标系统
图1中:P(x,y,z)为目标点坐标;A(xα,0,zα)为接收/发射天线的坐标,随传感器在轨道上位置的变化而变化,进而形成合成孔径天线;x轴平行于轨道方向;经过原点且垂直于轨道方向(距离向)为y轴方向;经过原点且垂直于xoy平面方向为z轴方向;zα为传感器中心位置距参考平面的高度;R(r,ψ)为传感器收发天线至目标点的距离[2]。
如图2 所示,将传感器在不同位置时的天线看为主辅天线。
主辅天线至P 点距离之差Δr 为
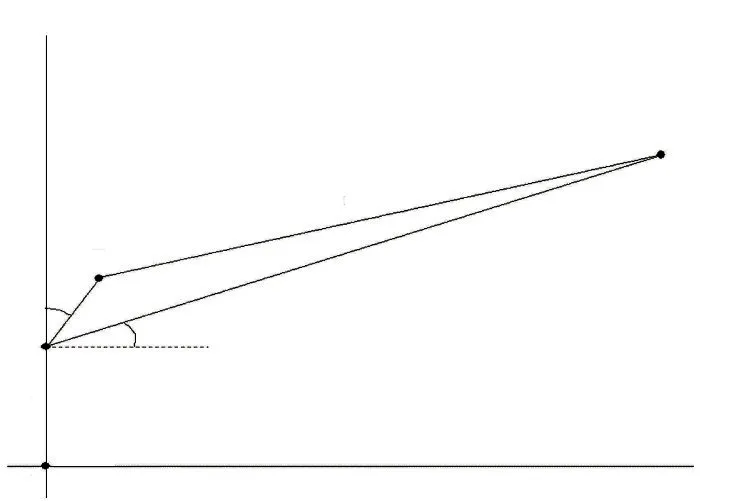
图2 地面合成孔径雷达成像

其中有效基线长度B和倾角ε的求解公式


有效基线的水平分量与ψ有关,其关系表达式

对于ψ方向的点,有效水平基线即为初始水平基线在ψ方向的投影,可以得到地形高度z与干涉相位φ和Δr之间的关系

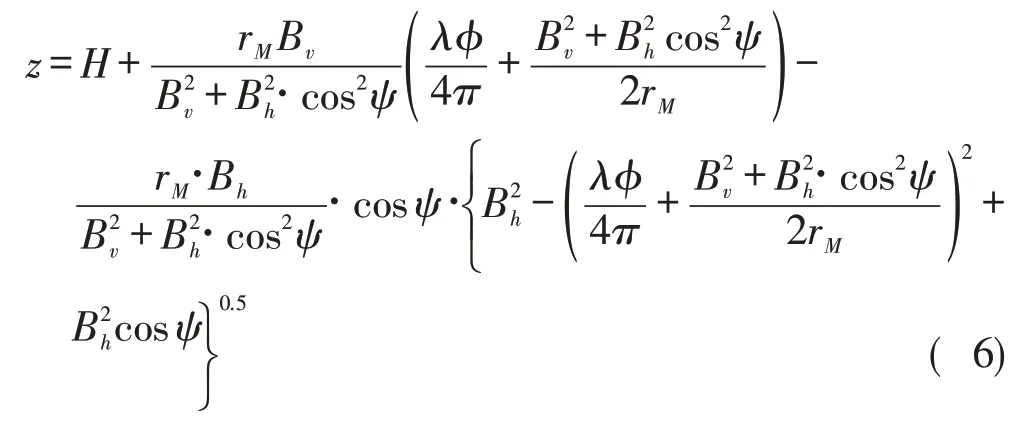
地面合成孔径雷达系统通过高程与相位的关系实现地形测量,(x,y)坐标的计算公式[2]

地面合成孔径雷达与三维激光扫描扫描数据之间的配准实际上就是两个空间直角坐标系之间的转换问题。三维激光扫描所需点云数据可以从导出的txt文件中经筛选得到,表示为xTLS、yTLS、zTLS;地面合成孔径雷达相应点平面坐标可通过matlab 的抓取功能,由gpick()函数从位移图中获得。然后根据式(1)~(7)反推,可得到地面点相对于参考面的高程(即z 坐标)和角度ψ,从而得到所需点的三维坐标(x,y,z)。这里地面合成孔径雷达空间坐标系表示为xSAR、ySAR、zSAR。
为准确地将地面合成孔径雷达影像配准到由三维激光数据建成的DEM(坐标定义为xDEM、yEM、zDEM)上,需要确定地面合成孔径雷达坐标系统和DEM 坐标系统之间的转换关系。
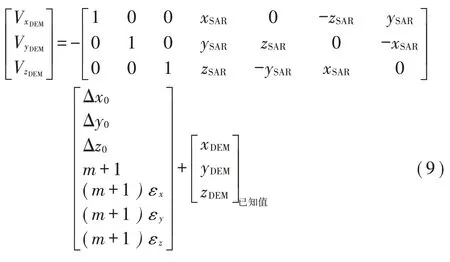
地面合成孔径雷达坐标系和DEM 坐标系统的转换存在7 个参数,分别为3 个平移参数、3 个旋转参数和1个尺度参数,相应的坐标变换公式
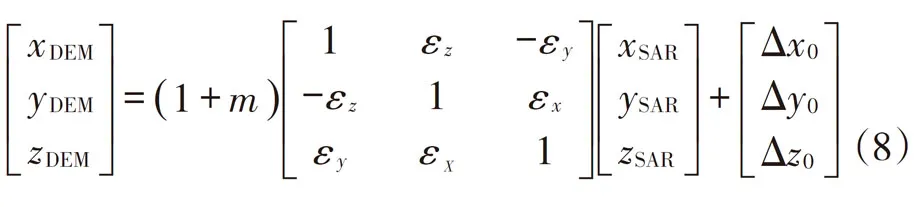
式中:△x0、△y0、△z0为平移参数;εx、εy、εz为旋转参数,m为尺度变化参数。
误差方程
根据最小二乘法VTPV=min的原则,利用至少3个已知控制点求得7个参数值[3],最后利用求得的转换参数实现两坐标系之间的转换。
2 工程实例
隔河岩大坝位于中国湖北长阳县长江支流的清江干流上,下距清江河口62 km、距长阳县城9 km,属于混凝土重力拱坝,最大坝高151 m。水库总库容34 亿m3。
2.1 数据获取
2.1.1 地面合成孔径雷达数据
试验进行期间天气状况良好,将地面合成孔径雷达设备安置在距离大坝300 m 的正前方,保证地面合成孔径雷达的视线方向与大坝形变方向一致,所获结果能直接反应大坝的形变情况。采样频率为20 min,对大坝进行持续观测,共维持8 h,获取28景影像。见图3。

图3 地面合成孔径雷达
2.1.2 点云数据
采用RIGEL 公司的VZ-400 型号三维激光扫描仪及用于控制和数据处理的RISCAN PRO 软件包,利用三维激光扫描仪进行扫描。先对大坝周围环境进行全景扫描,所用采样率为系统自动采样率;扫描完成后,重新设定采样率为10 mm,对大坝进行精扫,时间共持续20 min。见图4。

图4 地面三维激光扫描
2.2 数据处理
2.2.1 预处理
分别对采集的地面合成孔径雷达和三维激光扫描数据进行滤波和去噪处理。见图5和图6。

图5 大坝表面位移

图6 大坝表面点云
图5中正值表示目标与仪器直接视线向距离的增加,负值表示目标与仪器直接视线向距离的减少。由图5可以看出,在整个观测时间段内,坝体的大部分位移在2 mm以内,大坝整体处于相对稳定状态。
2.2.2 三维干涉雷达点云的生成
基于matlab 的多维可视化功能,三维干涉雷达点云的生成通过matlab程序实现。
首先,从IBIS_DV 软件和RISCAN PRO 软件中提取合成孔径雷达和三维激光扫描处理后的位移图数据和点云数据。
在 matlab 中分别利用 gpick()函数从图 5 和图 6 中分别选择7 个公共控制点,获取公共控制点的图上坐标,见表1。
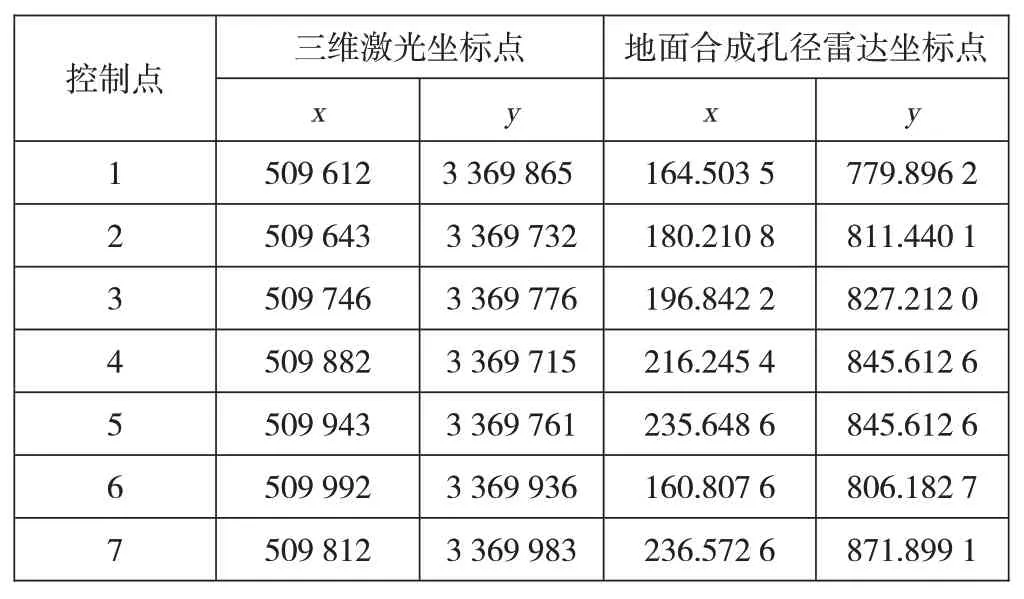
表1 公共控制点坐标 m
对三维激光扫描点,利用已知的平面坐标,通过循环结构,找到点1~7在局部坐标系中的三维坐标;对地面合成孔径雷达点,首先利用已知平面坐标,结合式(1)~(8)反求出平面点对应的高程坐标。见表2。
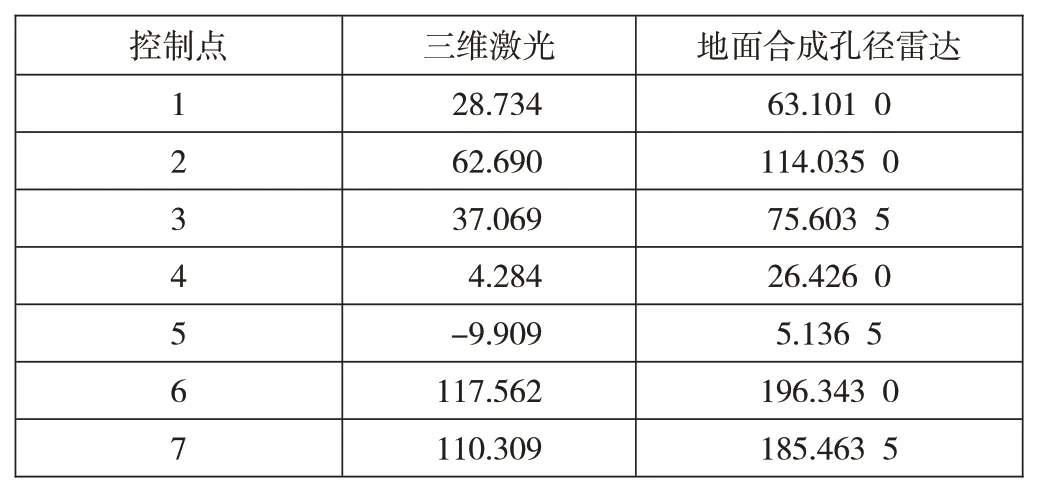
表2 所选控制点高程坐标 m
然后进行坐标转换,获得最终配准结果,见图7。

图7 三维干涉雷达点云
图7是高精度位移信息和三维可视化空间信息的集成,保留了合成孔径雷达和三维激光扫描两者的优点。
准确的雷达位置信息是配准进行的前提,配准连同校准阶段一同进行,是一个迭代循环的过程。当目标发生显著位移变化时,需要重新采集数据并重复上述步骤,通过不断计算两者的相关系数,最终完成配准。
2.3 结果分析
为了看大坝表面点具体的位移情况,从大坝上下位置各取5个点进行分析,见图8。

图8 所选控制点标识
提取10个所选点的位移数据,计算两两之间的相关系数[3]

式中:xi和yi为两组不同的位移-时间序列;rxy即为序列xi和yi之间的相关系数且|rxy|≤1,在这个范围内,相关系数越大,代表两组序列的相关性越大。
经计算,所选10个点的相关系数见表3。
由表3 可知,10 个点的相关系数均在0.88 以上,相关性较高。另外,7~9 点与其他点的相关性相对较低,可能是因为这3 个点位置较低,受到的水压较大。
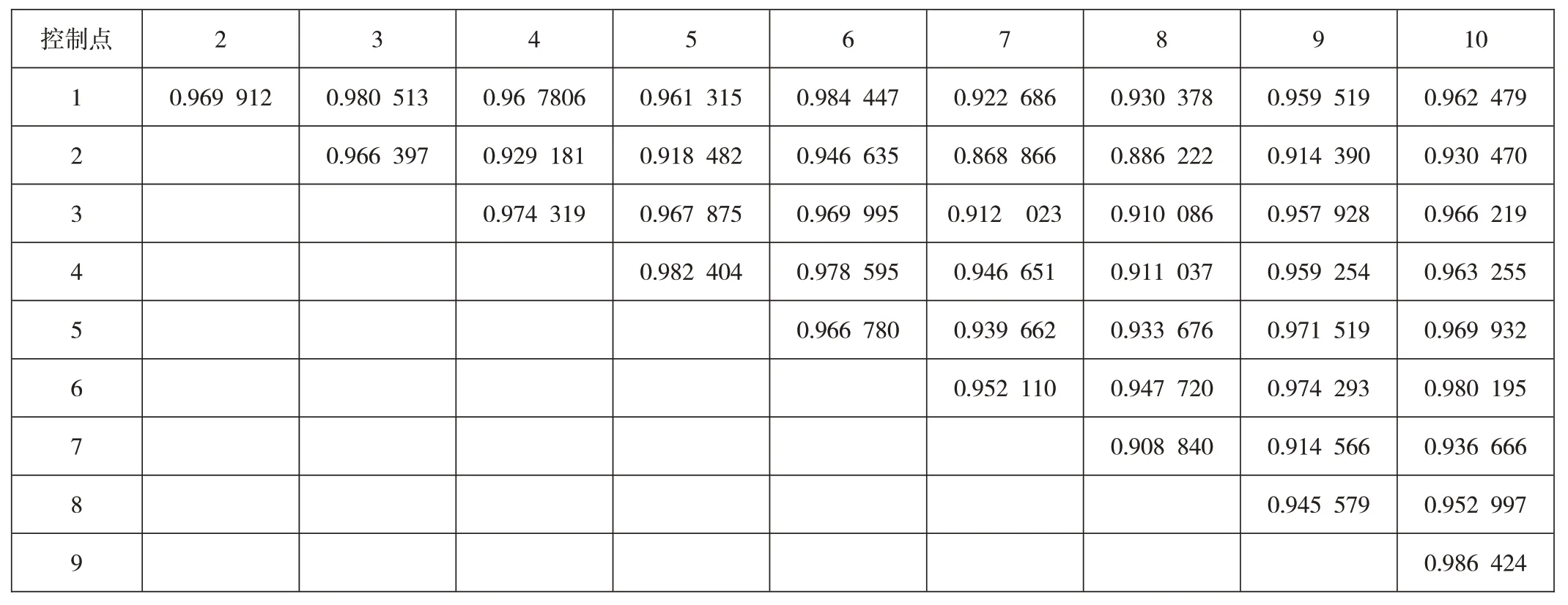
表3 控制点相关系数
3 结语
来源于地面合成孔径雷达的结构形变数据与来源于地面三维激光扫描的点云数据可以共同应用于大坝结构的稳定性分析。地面合成孔径雷达与地面三维激光扫描各具特性,将两者结合使用,提供了一种全新的大坝形变监测方法和应急手段,克服了传统二维视图所带来的不便。
