吊杯式栽植器运动轨迹优化与试验
2019-07-18王士国毛罕平李亚雄韩绿化
刘 洋,王士国,毛罕平,李 斌,王 涛,李亚雄,韩绿化
(1.新疆农垦科学院机械装备研究所,新疆 石河子 832000;2.农业农村部西北农业装备重点实验室,新疆 石河子 832000;3.江苏大学现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
毛罕平(1961-),男,浙江宁波人,教授,主要从事农业机械装备和设施农业环境控制技术研究。E-mail:maohp@ujs.edu.cn
我国西北干旱地区加工番茄移栽种植普遍需要铺设地膜[1],机械移栽时必须采用膜上成穴移栽的方法。在成穴移栽机研究方面,金鑫等[2]设计了曲柄滑槽式移栽机构,李华等[3]设计了行星轮系五杆移栽机构,俞高红等[4]研究了椭圆齿轮行星轮系移栽机构,陈建能等[5-6]研制了变形椭圆齿轮行星系和多杆式零速穴盘苗移栽机构,这些研究利用可视化运动仿真软件,从机构学角度优化出满足蔬菜穴盘苗成穴移栽要求的栽植器运动轨迹和机构结构参数,在机构上可以减小膜面穴口,保证移栽直立,但这些移栽机构的栽植器都是单侧与运动机构连接,受力条件较差,对移栽用地的整地要求较高。吊杯式移栽机对整地水平要求不高,工作可靠性高,在加工番茄铺膜移栽种植过程中得到了应用[7]。但是吊杯式移栽机在成穴移栽时膜面穴口较大,这会降低地膜保温、保墒的作用[8-9]。
为了解决吊杯式移栽机成穴时膜面穴口大的问题,李旭英等[10]优化得出栽植器入土部位为圆形时有利于减小膜面穴口尺寸。封俊等[11]提出了吊杯式移栽机的设计准则,崔巍等[12]研究了减小膜面穴口尺寸的约束条件,这对吊杯式移栽机构的设计具有指导意义,但是这些研究都是分析栽植器上一个点的运动轨迹,栽植器入土部位的形状不规则,与土壤是面接触,仅研究一点的运动轨迹是不全面的。为此,本文在分析吊杯式栽植器运动轨迹特性的基础上,进行多轨迹线运动仿真,优化出可以减小膜面穴口尺寸的运动轨迹,并通过移栽试验进行验证,为吊杯式移栽机的设计和性能优化提供参考。
1 栽植器运动轨迹特性
吊杯式栽植器在随移栽机行驶的同时绕定轴转动,始终处于垂直状态,当栽植器转动到定轴下方时在土壤中打开并成穴。此时在移栽机前进方向形成的膜面穴口尺寸为纵向尺寸,在栽植器打开方向形成的膜面穴口尺寸为横向尺寸,纵向和横向穴口尺寸互相垂直。
1.1 纵向运动轨迹分析
栽植器的运动示意图如图1所示。栽植器做平动,取栽植器的下端尖点e进行研究。在栽植器的转动中心建立坐标系xoy,可以得到点e的运动轨迹方程[12]:
(1)
式中,v0是栽植器随移栽机行驶的速度;t是运动时间;ω是栽植器转动的角速度;R是栽植器绕定轴转动的半径;l是栽植器自转的转动中心p到点e的距离。
对式(1)求一阶导数可以得到点e的运动速度方程:
(2)
将λ=ωR/v0定义为栽植器运动轨迹的特征系数。
根据零速投苗原理[13],当λ≥1时可以保持穴盘苗移栽直立。图2是λ取不同值的运动轨迹曲线。当λ=1时,运动轨迹为摆线,在轨迹线的最低点有一个速度为0的点(轨迹线1);当λ>1时,栽植器的运动轨迹为余摆线(轨迹线2);根据余摆线的性质[14-15],在余摆线环扣最大横弦处存在速度为零的点D和E。随着λ的增大,点D和E向上移动,两点间的距离lDE逐渐增大(轨迹线3和4)。在相同移栽深度H条件下,栽植器的下扎和上拔会与地膜形成两个交点A和B。随着λ的增大,环扣的交点C上移,点A和B间的距离lAB逐渐减小,当点C上移到与地膜表面相交时(轨迹线3),点A和B与点C重合,此时lAB= 0。随着λ的继续增大,点C会上移到地膜表面以上,此时lAB又开始增大(轨迹线4)。可以得出,当λ从轨迹线1开始增大时,lAB先减小然后增大,点C与地膜表面重合时是lAB变化的转折点。

图1 栽植器运动示意图Fig.1 Schematic diagram of planting device movement

图2 栽植器的运动轨迹Fig.2 Motion trajectories of planting device
栽植器始终做平动,膜面穴口的尺寸由地膜表面以下运动轨迹在水平方向的最大距离决定,通过对lAB和lDE的变化分析可知,存在一条lAB=lDE的轨迹线,使地膜穴口的纵向尺寸变化达到一个平衡值。
加工番茄移栽深度一般为60~80 mm[16]。取最大移栽深度80 mm进行研究,求此时lAB=lDE的λ值。
栽植深度为80 mm时点e的纵坐标y1为:
y1=-R-l+80
(3)
令θ=ωt,由式(1)和(3)可以求得栽植深度为80 mm时,栽植器上点e运动到点A转动的角度θA为:
(4)
以课题组研制的吊杯式移栽机为研究对象[7],相关参数为R=240 mm,l=181 mm,可以求得θA为0.7297 rad。
由式(1)可得栽植器上点e运动到A点的横坐标xA为:
(5)
因为点e运动到点D时水平方向的速度为零。由式(2)可知此时
v0-ωRsinθ=0
(6)
可以得到栽植器上点e运动到点D时转过的角度θD为:
(7)
由式(1)可得点e运动到D点的横坐标xD为:
(8)
因为余摆线是偶函数,呈轴对称[14]。为了使lAB=lCD,只需要保证点A和点D的横坐标xA和xD相等即可,由式(5)和(8)可得:
(9)
求解式(9)可得λ=1.093。
1.2 横向运动轨迹分析
栽植器破膜成穴打开的位置关系到膜面穴口的尺寸和移栽直立状态[8,12]。栽植器应该在水平方向速度为零的点打开并将穴盘苗投落,但是栽植器从闭合状态到打开足够大,将穴盘苗投落有一个运动过程,因此栽植器应该在水平方向零速度点两侧打开,即摆线的最低点两侧、余摆线的下扎或上拔的最大横弦两侧打开。栽植器在余摆线下扎过程中打开时,回土流和栽植器最下端的土壤会进入栽植器内部将穴盘苗支撑住,穴盘苗不能随着栽植器的下扎继续深入土壤,穴盘苗脱离栽植器的时间较长,这不利于穴盘苗移栽直立;栽植器在上拔阶段打开时,穴盘苗相对栽植器的速度较大,脱离时间较短,利于移栽直立;摆线的打开位置介于余摆线下扎和上拔打开位置的中间。栽植器在打开后要始终处于张开状态,直到穴盘苗完全与栽植器分离后才可以闭合,否则会出现夹带苗现象。张开的栽植器会增大地膜的撕裂,为了减小地膜穴口的尺寸,应该在栽植器入土后尽可能迟些打开。综合考虑穴盘苗移栽直立和膜面穴口尺寸,应该选择余摆线的运动轨迹,在栽植器上拔阶段打开栽苗。
2 栽植器运动仿真分析
通过对1.1节栽植器上一点的运动轨迹进行研究,得出的λ值可以用于指导运动轨迹的选择。但是栽植器与土壤是面接触,可以用ADAMS软件仿真分析栽植器的成穴运动,在栽植器下端入土部位的两侧等距离的各选择5个点(图3),仿真得到这10个点的运动轨迹包络线,用包络线来研究膜面穴口的尺寸。

图3 栽植器上仿真取点位置Fig.3 Simulation point location on the planter
吊杯式移栽机构上一般设置4个栽植器,它们的运动轨迹相同,这里只取一个栽植器进行运动轨迹分析(图4)。利用三维制图软件建立移栽机构的三维模型,为了减少仿真分析时约束副的添加,将移栽机构中相邻两个不发生运动的零件绘制成一个部件,在三维模型中用不同的颜色代表各部件;将三维模型导入ADAMS软件中,在支撑盘的转动轴处同时添加平移副和转动副用以驱动整个机构的平移和转动,在支撑盘和支撑板之间添加固定副,在其他部件之间添加转动副,整个移栽机构共添加1处平移副、2处固定副和6处转动副(图4)。吊杯式移栽机为半自动移栽机,移栽频率一般为45~55株·min-1,取移栽频率50株·min-1进行仿真,此时栽植器转动的角速度ω为1.309 rad·s-1,该ω就是支撑盘转动轴处转动驱动副的角速度值,可以计算得不同λ值时移栽机的行驶速度v0(表1),并将v0设置为支撑盘转动轴处平动驱动副的速度值,进行运动仿真后可以得到栽植器的运动轨迹曲线(图5)。
图6是在移栽机构前进方向仿真分析得到的3条典型的运动轨迹包络线。可以看到随着λ值的增大,包络线中运动轨迹线的环扣都在增大。从运动轨迹的最下端向上测量80 mm,然后测量该位置水平方向包络线最外侧的距离,从图中可以看到,该处的尺寸是轨迹包络线在地膜以下最大的宽度。将测量结果统计在表1中,可以看到,地膜穴口纵向尺寸随着λ值的增大,先减小然后增大。λ=1.093时,穴口的纵向尺寸最小,为70.6 mm。
图7是栽植器在上拔阶段打开仿真分析得到的运动轨迹包络线。该包络线的最大宽度与栽植器的最大开合度以及打开的位置有关,与栽植器在前进方向的运动轨迹形状没有关系。为了保证番茄穴盘苗可以顺利地从栽植器中落下,栽植器的最大张开尺寸设置为50 mm,测量80 mm高度轨迹线的最大宽度为71.3 mm,这就是膜面穴口横向尺寸的理论值。
3 膜上成穴移栽试验
3.1 试验方法
为了验证理论计算和仿真分析的结果,用吊杯式移栽机进行移栽试验。移栽机构上的支撑板可以控制栽植器在上拔阶段打开(图8),而栽植器的运动轨迹可以通过改变地轮到栽植器的链轮传动比进行调整。
移栽时,地轮通过链条传动驱动栽植器转动,λ的计算公式为[17]:
(10)
式中,D是地轮的直径,为600 mm;Z1、Z2、Z3和Z4分别是图6中地轮转动轴、中间传动轴和栽植器转动轴位置的链轮齿数;Z2为30齿,Z3和Z4为22齿。
理论株距L为:
(11)
通过调整Z1的齿数得到不同的λ值,链轮齿数与λ值的关系见表2。
3.2 试验条件
在地面用壤土起垄,垄高20 cm,垄宽80 cm,地轮行驶在土垄两侧(图9);在土壤表面铺设厚度为0.01 mm、宽度为100 cm的聚乙烯地膜;试验时土壤含水率26.4%,土壤坚实度450 N·mm-2;用128孔穴盘培育的穴盘苗进行试验,苗平均株高16 cm,移栽深度8 cm,移栽频率取50和55株·min-1,每组试验移栽番茄穴盘苗256株,对膜面穴口的纵向、横向尺寸和株距进行测量,并统计倾斜率,认为当穴盘苗的苗茎与地面夹角小于30°时[18],倾斜严重。

表1 不同λ值时的移栽机行驶速度和穴口纵向尺寸
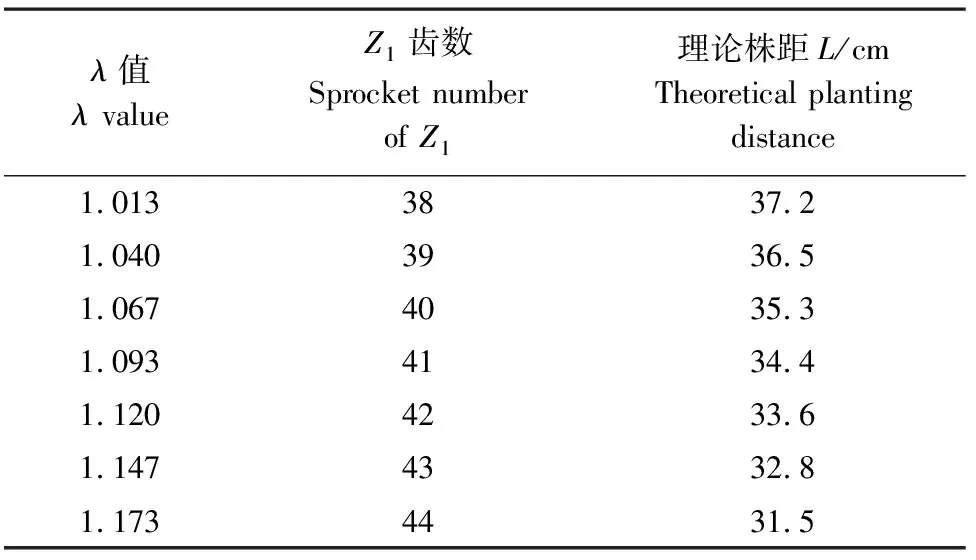
表2 链轮齿数与λ值的关系
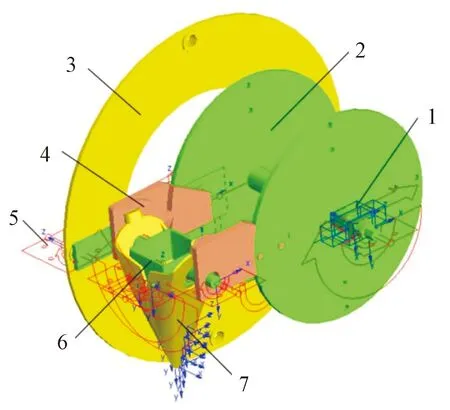
1. 平移副;2. 支撑盘;3.外盘;4.支撑板;5.转动副;6.栽植器转动轴;7. 栽植嘴1. Translational pair; 2. Support dish; 3. Outer disk; 4. Support plate;5. Rotating pair; 6. Planter axis; 7. Planting nozzle图4 吊杯式移栽机构仿真模型Fig.4 Three-dimensional model of basket-typetransplanting mechanism

图5 仿真运动的轨迹线Fig.5 The trajectories of simulation motion

图6 栽植器运动轨迹包络线Fig.6 The motion trajectories envelope of planting device
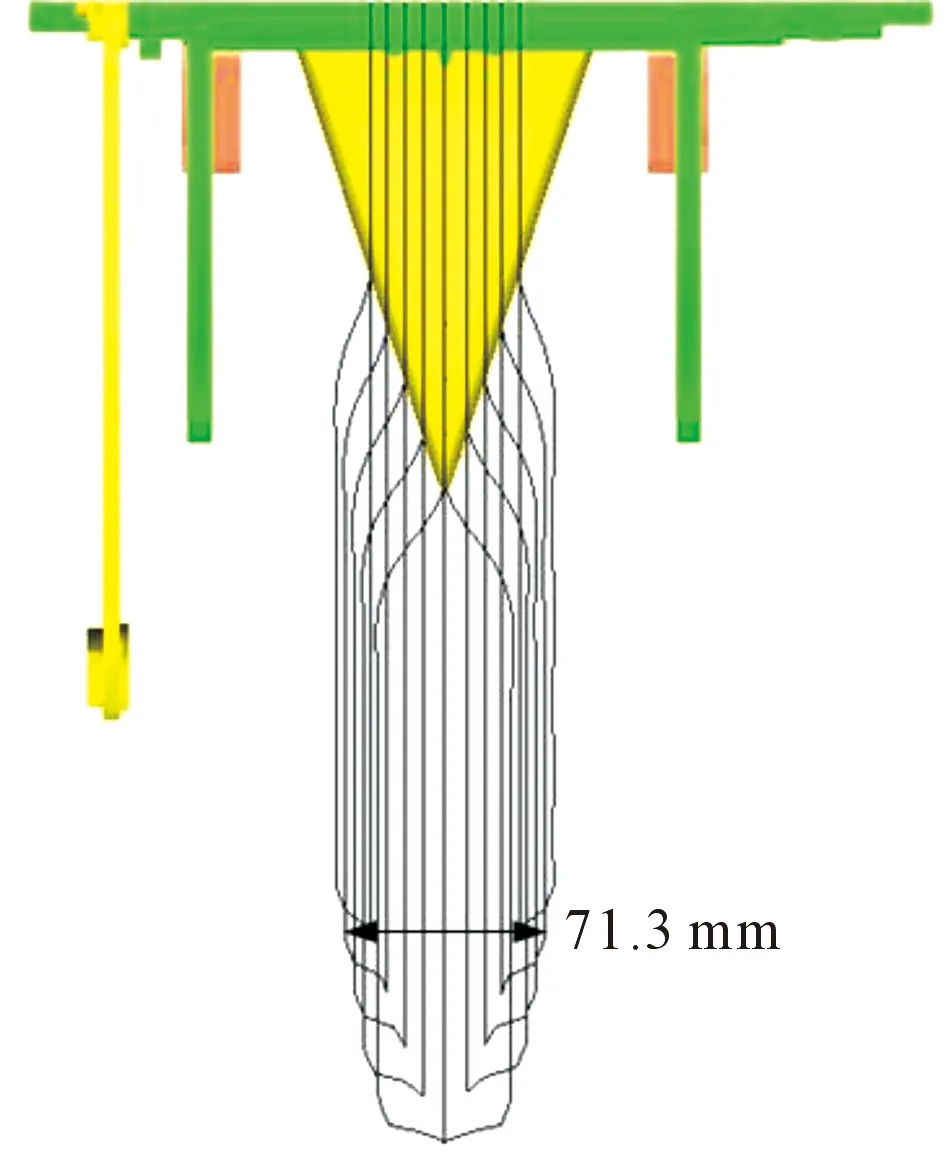
图7 栽植器打开形成的包络线Fig.7 The envelope of the planter opening process

1. 地轮;2. 链条;3. 中间轴;4. 支撑板;5. 栽植器1. Wheel; 2. Chain 3. Intermediate shaft; 4. Support plate; 5. Planter图8 吊杯式移栽机的传动示意图Fig.8 Structure diagram of basket-type transplanterdrive system

图9 膜上成穴移栽试验Fig.9 The experiment of hole-forming transplanting on the film
3.3 试验结果
穴口的纵、横向尺寸见图10。可以看到,移栽试验测量的膜面穴口纵向尺寸明显大于理论值(图10(a)),这是因为理论分析得到的穴口尺寸仅是栽植器上选取的点的包络线的宽度,而成穴移栽时栽植器的打开会撕裂地膜,使地膜的穴口沿着机具前进方向扩展,同时移栽机的行驶滑移也会加剧地膜的撕裂。从图10(a)可以看到,两种移栽频率条件下,地膜穴口纵向尺寸随着λ值的增加先减小然后增大,在λ=1.093时,移栽频率为50株·min-1和55株·min-1的穴口纵向尺寸分别为10.12 cm和9.49 cm,为最小值;λ=1.173时,两种移栽频率条件下的穴口纵向尺寸分别为14.74 cm和13.12 cm,为最大值。试验结果表明λ值对膜面穴口纵向尺寸的影响与仿真分析结论一致。移栽频率为50株·min-1的穴口纵向尺寸始终大于55株·min-1的尺寸,这是因为地轮会与地面形成摩擦滑移,移栽频率为50株·min-1时,栽植器在成穴过程中滑移的时间相对较长,导致穴口的纵向尺寸较大[7]。由图10(b)可以看出,随着λ值的增加,两种移栽频率条件下穴口横向尺寸也有先减小然后增大的趋势,但是形成的穴口横向尺寸小于理论值,这是因为地膜具有弹塑性[19],铺设地膜时为了使膜面平整,在地膜纵向存在一定的张紧力,栽植器扎破地膜离开后,在张紧力的作用下,地膜穴口横向尺寸会收缩减小,可以看到移栽频率为50株·min-1和55株·min-1时,穴口的横向尺寸变化范围分别为3.07~4.23 cm和3.08~4.05 cm,变化较小。可以得出,λ值的变化对地膜穴口纵向尺寸影响显著,对穴口横向尺寸影响不明显,λ=1.093时膜面穴口的尺寸最小。图11是λ为1.093和1.173时地膜穴口尺寸对比。
图12是不同λ值的移栽株距。可以看到,移栽频率为50株·min-1和55株·min-1时,株距都随着λ值的增大而减小,变化范围分别为39.8~33.5 cm和39.1~33.1 cm。移栽过程中,地轮与地面之间的滚动摩擦使得移栽机存在滑移,导致移栽株距大于理论值。移栽频率为50株·min-1的株距始终大于55株·min-1的株距,说明提高移栽频率,减小地轮滑移时间,可以减小移栽株距与理论值之间的偏差。
表3是不同λ值时的移栽倾斜率。可以看到,移栽频率为50株·min-1和55株·min-1时,倾斜率的变化范围分别为1.93%~3.54%和1.73%~3.91%,变化范围非常小。穴盘苗的苗叶有一定的展幅,栽植器投苗时对穴盘苗有挂带现象,成穴时回土流得不均匀,这些都会导致穴盘苗移栽倾斜。但是栽植器是在上拔阶段的零速投苗点两侧打开,无论栽植器的运动轨迹如何变化,穴盘苗被投落时水平方向的速度都非常小,因此λ的变化对倾斜率影响不明显。

图10 不同λ值时地膜穴口尺寸Fig.10 The dimension of film hole at different λ value
图11 膜面穴口尺寸对比Fig.11 Comparison of the film hole dimension
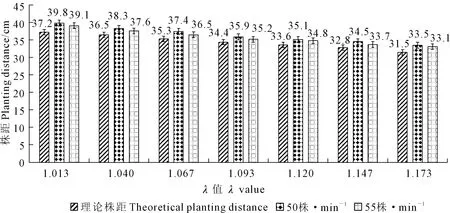
图12 移栽株距Fig.12 Transplanting plant spacing
对于膜面穴口,应该尽可能的小,这样有利于减少土壤中水分的蒸发。但是通过试验可以发现,λ值对膜面穴口的纵向尺寸和移栽株距影响是不同的,而株距和膜面穴口尺寸都关系到作物的生长和产量,应该根据蔬菜种植的农艺要求选择λ值。
成穴移栽时,穴口的尺寸是由栽植器、土壤和地膜的相互作用形成的,这就要求不仅要优化栽植器的结构和λ值,还应该提高整地和铺膜质量,使土壤细碎平整,地膜可以与地表土壤紧密地接触在一起,减少地表大颗粒土壤将地膜顶起导致的栽植器扎破地膜的距离大于移栽深度[20]。同时注重移栽机的工作性能和整地质量才可以达到最佳的移栽效果。

表3 移栽试验结果
4 结 论
1)对吊杯式栽植器的运动轨迹进行分析得出,当轨迹为余摆线,余摆线环扣最大横弦的距离等于轨迹线与地膜交点间的距离,且栽植器在上拔阶段打开时有利于减小膜面穴口和保证移栽直立,计算得此时运动轨迹的特征系数λ为1.093。
2)膜上成穴移栽结果表明,随着λ值的增加,穴口的纵向尺寸先减小然后增大。移栽频率为50株·min-1和55株·min-1,λ=1.093时的穴口纵向尺寸分别为10.12 cm和9.49 cm,穴口尺寸最小;两种移栽频率下,随着λ值的增加,穴口横向尺寸的变化范围分别为3.07~4.23 cm和3.08~4.05 cm,变化较小;λ值的变化对地膜穴口纵向尺寸影响显著,对穴口横向尺寸影响不明显。移栽株距随着λ值增加逐渐减小,提高移栽频率可以减小移栽株距。移栽频率为50株·min-1和55株·min-1时,倾斜率的变化范围分别为1.93%~3.54%和1.73%~3.91%,变化范围非常小,λ值对倾斜率的影响不明显。