基于前馈-模糊PID反馈联合控制的4WIS研究
2019-07-16陈哲明
喻 敏,程 灿,周 鹏,陈哲明
(1.重庆生产力促进中心, 重庆 401147;2.重庆理工大学 汽车零部件先进制造教育部重点实验室, 重庆 400054)
近年来,对于四轮独立转向控制系统对汽车操纵稳定性控制的影响,很多学者进行了深入研究。文献[1-2]基于线性2自由度理想单轨模型对四轮转向模型进行推导,设计左右车轮转角相同,并利用模糊、滑模等控制策略实现对整车质心侧偏角的有效控制和横摆角速度的跟随,但该方法未考虑车辆转向运动协调性;文献[3-4]利用阿克曼转向定理,以2自由度线性理想模型作为参考模型,以模糊控制实现对整车的四轮独立转向控制。该方法虽然兼顾了车辆转向的运动协调性,但对理想模型跟踪效果并不理想。
针对上述研究存在的不足,本文建立了线性2自由度线性理想模型,利用Carsim软件进行参数化建模,以横摆角速度为控制目标,提出一种阿克曼定理前馈-模糊PID反馈的联合控制策略。该控制策略既能兼顾车辆转向时的运动协调性,又能有效改善汽车高速时的操纵稳定性和低速时的转向灵活性[5]。
1 整车四轮独立转向模型的建立
1.1 2自由度线性理想动力学建模
为满足四轮独立转向控制系统各车轮转向符合驾驶员期望及反映整车行驶的理想状态[6]的需求,建立2自由度线性理想模型,认为车辆只做侧向运动和绕Z轴的横摆运动,并做如下假设:忽略空气阻力和滚动阻力对车辆行驶状态的影响,将其输出的横摆角速度作为理想值。由此可得阿克曼四轮独立转向汽车的动力学微分方程为:
(1)

(2)
理想状态下令质心侧偏角β=0,将其代入式(1)(2)可得:
(mau2kf+bkfkrL)(θ1+θ2)=
(mbu2kr-bkfkrL)(θ3+θ4)
(3)
其中:车辆前、后轮侧偏角与其运动参数有关,θ1、θ2、θ3、θ4为车轮实际运动方向与汽车纵向运动方向之间的夹角。通过此夹角及侧偏角的关系[7],整理得到状态空间方程如下:

式中:kf为前轴侧偏刚度;kr为后轴侧偏刚度。其中:

1.2 阿克曼转向定理转向几何模型
阿克曼几何运动关系为汽车在转向行驶时,保证汽车所有的车轮都能绕同一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动运动[8]。如图1所示:θ1、θ2、θ3、θ4为4个车轮的转角;α1、α2、α3、α4为4个车轮的侧偏角;F1、F2、F3、F4为4个车轮产生的侧向力。基于阿克曼转向运动的2自由度四轮独立转向模型见图1。
图1 2自由度四轮独立转向模型
(4)
(5)
(6)

(7)
式中:D为车轮的轮间距;F为转向中心到后轴的距离;d为转向中心到前轴的距离;e为转向中心到左后轮的横向距离;r为车轮半径。
阿克曼转向定理能够解决传统车辆转向并不绕同一个瞬时转向中心导致的运动不协调的问题[9],由F=d-L,经整理可得:
(8)
(9)
(10)
(11)
将式(8)~(11)代入式(3)可推导出:
(12)
根据式(12),定义如下:
(13)
其中:K为两后轮转角和与两前轮转角和的比例关系;a为质心到前轴的距离;b为质心到后轴的距离。
将式(13)代入式(8)~(11)可得四轮独立转向系统中其余3个车轮转角函数关系为:
(14)
θ3=Kθ1
(15)
(16)
1.3 轮胎模型
轮胎模型能反映车轮在路面的附着情况,同时其在车辆非线性行驶状态的力学和参数特性影响着汽车行驶性能。在Carsim中选用“魔术公式”轮胎模型[10],模型公式如下:
y=Dsin{Carctan[BX1-E(X1-arctanBX1)]}
(17)
2 前馈-模糊PID反馈联合控制器建立
驾驶员通常期望车辆在转向及受到外界不稳定干扰如横向风、斜坡等情况时,车辆的质心侧偏角能够趋于零,这样能够维持车辆运行的稳定性[11]。本文建立基于前馈-模糊PID反馈联合控制器,在Carsim中搭建整车模型,在Simulink中搭建控制器模型,控制结构原理如图2所示。

图2 控制结构原理
2.1 阿克曼前馈控制设计
由四轮独立转向系统基于阿克曼转向几何关系推导出的其余3个车轮的转角与主动转向车轮输入角的函数关系,建立阿克曼前馈控制器,并以此在Matlab/Simulink建立控制器。
2.2 模糊PID反馈控制设计
模糊控制具有鲁棒性强及不依赖于模型的建立的优点,主要借助工程人员的实践经验对系统的模糊规则进行设计,输出合适的控制量。PID控制结构简单,有较强的适应性,但其控制的有效性主要依赖Kp、Ki、Kd这3个参数的调节,其控制系统容易受外界干扰因素的影响,鲁棒性较差,显然难以获取令人满意的控制效果。将模糊控制与PID控制相结合,使两者优势互补,发挥各自的特点,可取得更好的控制效果[12]。模糊PID控制器结构如图3所示。
图3 模糊PID控制器结构
2.3 PID控制参数设定
Kp1、Ki1、Kd1三个参数的选取对系统的控制效果有着重要的影响。为了获得最佳PID参数,首先利用试验法对PID参数进行设置。对这3个参数的设置通常采取先比例、后积分、再微分后经多次试凑才能最终确定,本文PID初始参数分别设置为:Kp1=240,Ki1=45,Kd1=12。
2.4 模糊控制器设定
选取车辆的横摆角速度γ和其理想值γd的误差E及其误差变化率Ec为模糊PID控制输入变量,输出变量为Kp、Ki、Kd。输入E的模糊集为{NB、NM、NS、ZO、PS、PM、PB},分别对应{负大,负中,负小,零,正小,正中,正大}7种程度,其模糊论域为[-15,15]。输入Ec的模糊集为{NB、NM、NS、ZO、PS、PM、PB},模糊论域为[-6,6]。输入变量的隶属度函数如图4、5所示。
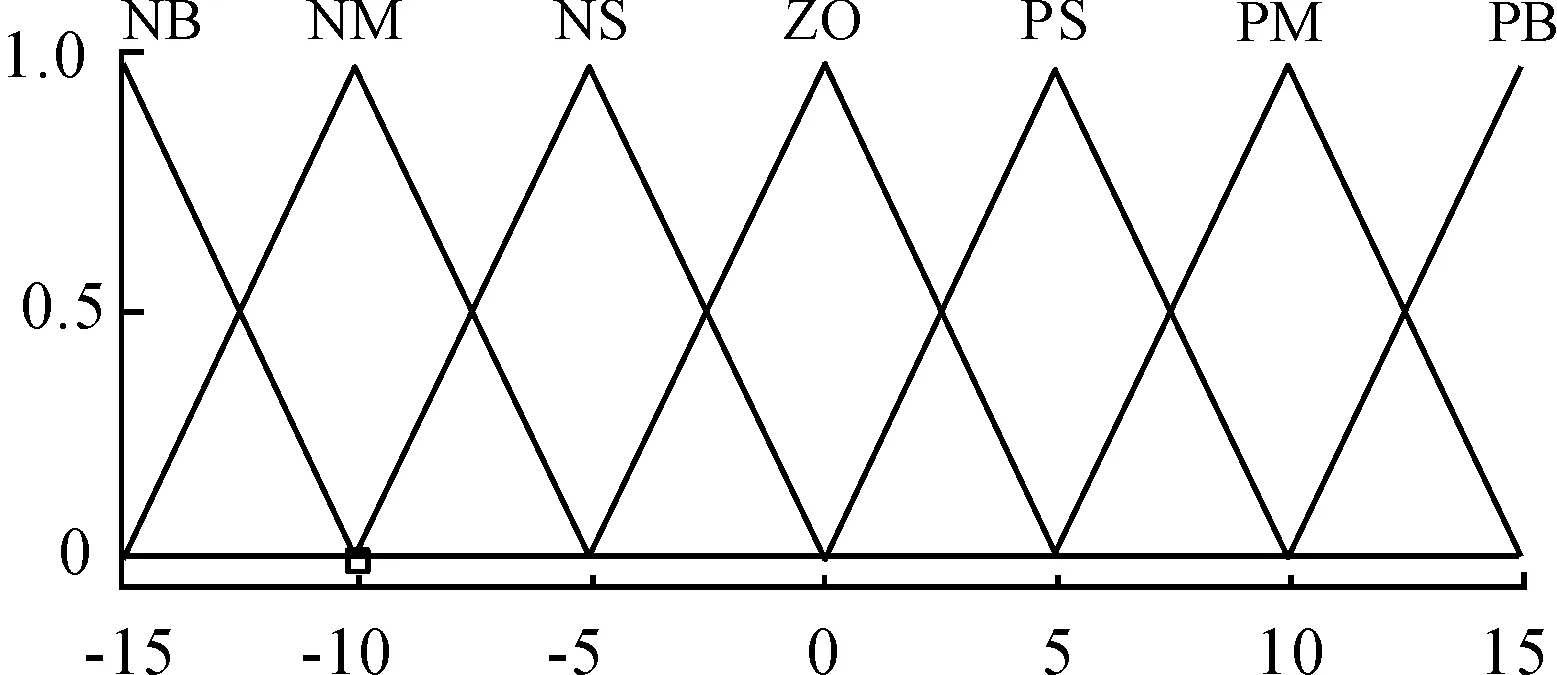
图4 输入变量E隶属度函数
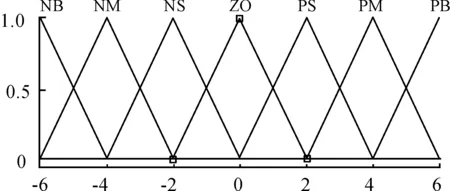
图5 输入变量Ec隶属度函数
输出Kp的模糊集为{NB、NM、NS、ZO、PS、PM、PB},模糊论域为[-25,25];Ki的模糊集为{NB、NM、NS、ZO、PS、PM、PB},模糊论域为[-10,10];Kd的模糊集为{NB、NM、NS、ZO、PS、PM、PB},模糊论域为[-2,2],均采用三角形隶属度函数。三者的隶属度函数如图6~8所示。

图6 输出变量Kp隶属度函数
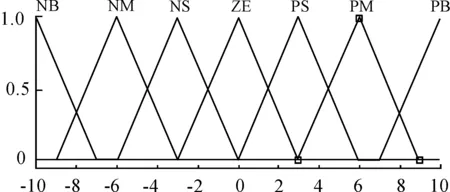
图7 输出变量Ki隶属度函数

图8 输出变量Kd隶属度函数
为保证对车辆稳定性具有良好的控制效果,借助于试验数据的总结,并根据Kp、Ki和Kd自整定要求,建立各参数对应的模糊控制规则。3个参数的模糊规则如表1所示.。

表1 Kp参数的模糊控制规则
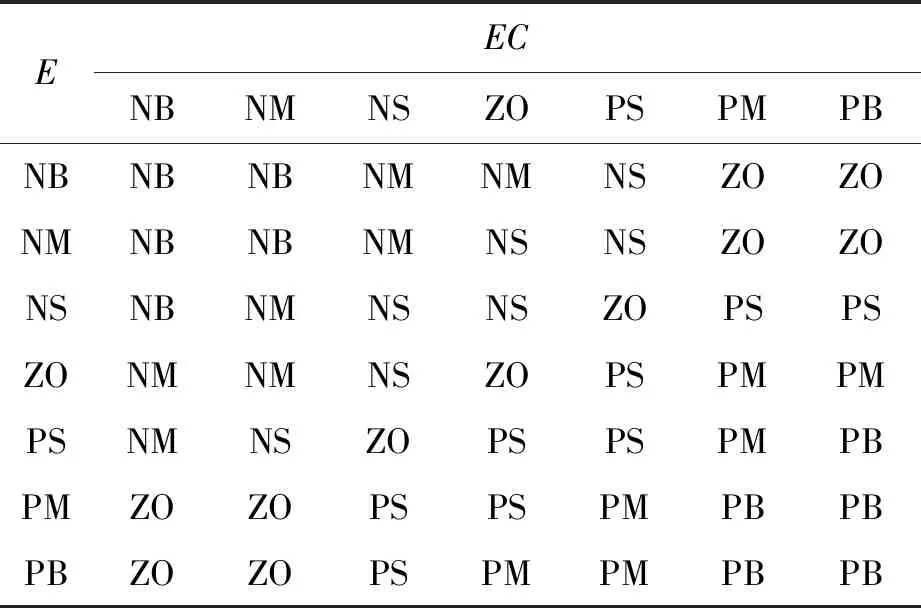
表2 Ki参数的模糊控制规则

表3 Kd参数的模糊控制规则
3 仿真结果对比与分析
Carsim整车结构参数如表4所示。本文采取Carsim/Simulink联合仿真试验验证基于阿克曼前馈与模糊PID反馈的联合控制策略的有效性。选取Carsim中C-Class Hatchback车型作为试验对象。左前轮角阶跃信号为输入,最大转角为8°。仿真车速分别为中速60 km/h、高速120 km/h。选取高附着路面条件μ=0.85,对比四轮独立转向(4WIS)前馈-模糊反馈联合控制与四轮独立转向(4WIS)前馈-模糊PID反馈联合控制效果,如图9所示。

表4 车辆结构参数
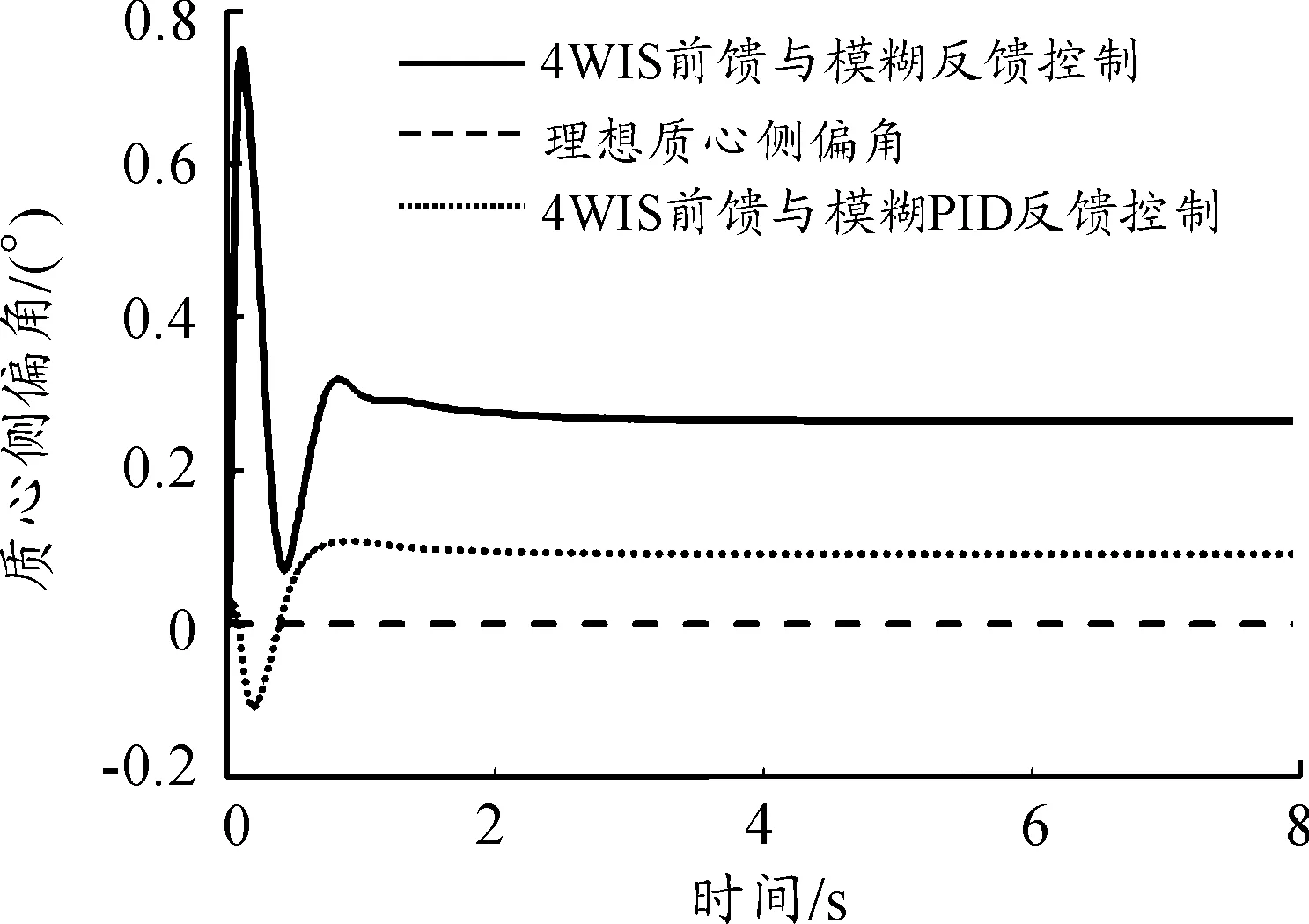
图9 60 km/h质心侧偏角对比

图10 60 km/h横摆角速度对比
如图9所示,在60 km/h的车速条件下经过前馈-模糊PID反馈联合控制的4WIS整车质心侧偏角在短时间波动后就平稳地过渡到稳定状态,比前馈-模糊反馈联合控制的4WIS的波动量有较大的缩短,质心侧偏角偏转幅度减小明显;且汽车稳态值接近理想状态。由图10可知:4WIS前馈-模糊PID反馈控制比4WIS前馈-模糊PID反馈控制横摆角速度更加平稳,偏转幅度与波动时间几乎可以忽略,且更趋于理想横摆角速度。综上所述,在中速条件下,经4WIS前馈-模糊PID反馈控制后,车辆不仅提高了整车的稳定性,稳态横摆角速度值也更趋近于理想车辆。
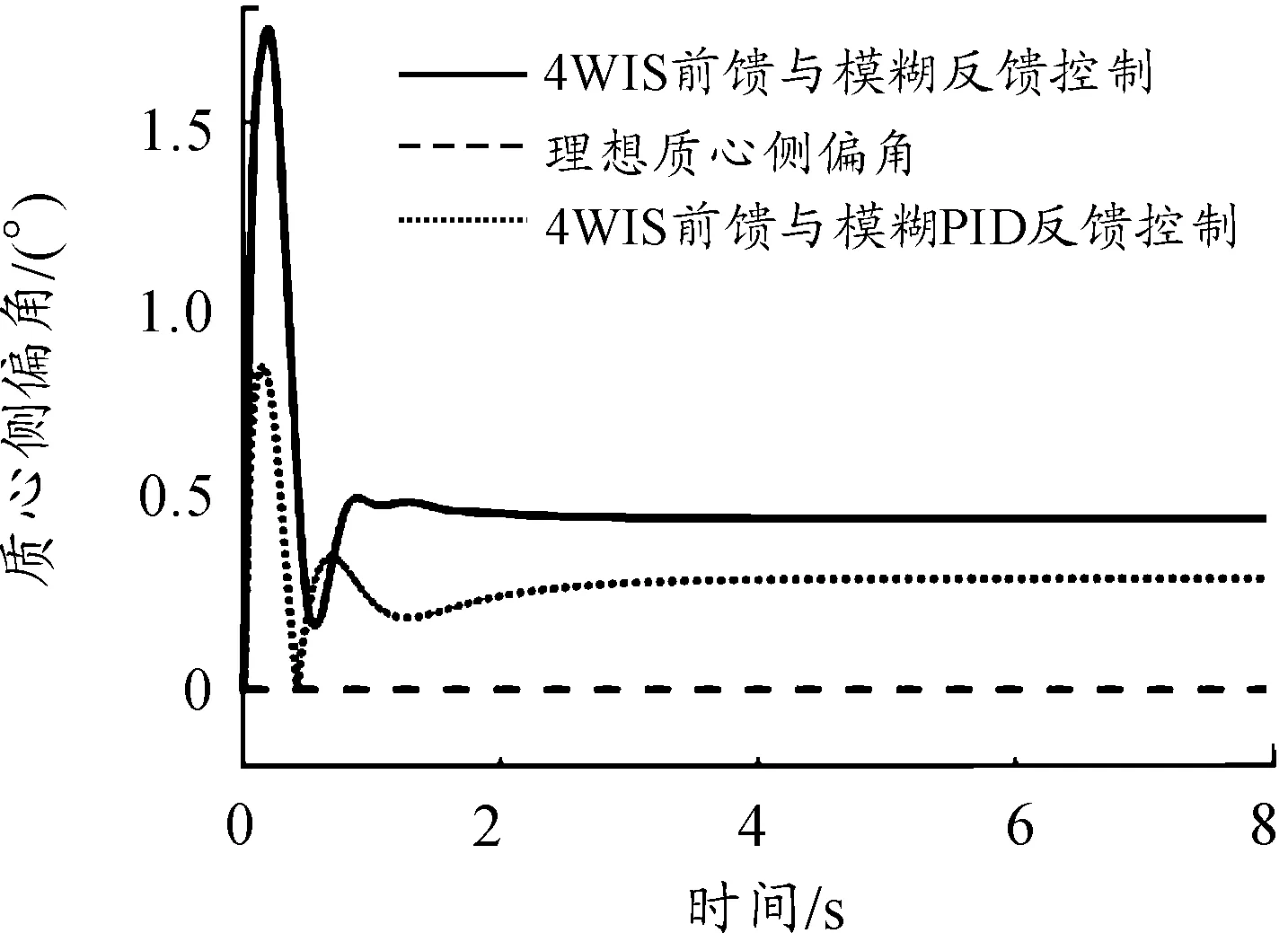
图11 120 km/h质心侧偏角对比

图12 120 km/h横摆角速度对比
如图11所示,在120 km/h的车速行驶条件下,4WIS前馈-模糊PID反馈联合控制的整车质心侧偏角比4WIS前馈-模糊反馈联合控制的不稳定状态波动时间短,且前者的质心侧偏角得到了较好的控制。如图12所示,4WIS前馈-模糊PID反馈控制的横摆角速度偏转量比4WIS前馈-模糊反馈控制的偏转量要小,汽车运行更加平稳。
选取低附着路面条件μ=0.4,在不同的车速条件下对汽车运行的稳定性进行验证,仿真结果见图13。
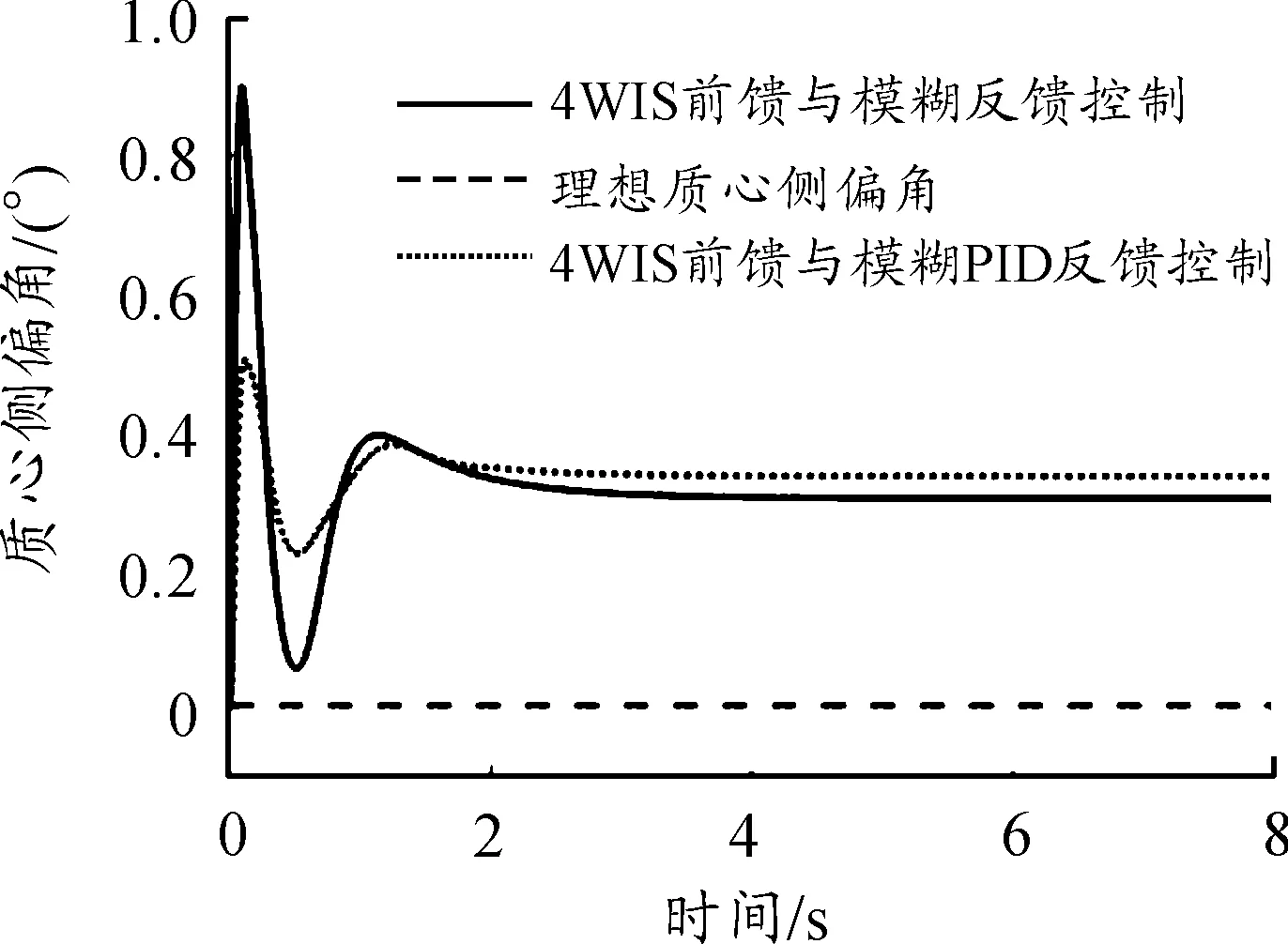
图13 60 km/h质心侧偏角对比
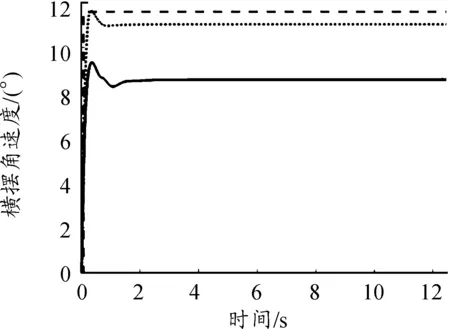
图14 60 km/h横摆角速度对比
由图13可知:在60 km/h的车速条件下,经过前馈-模糊PID反馈控制的4WIS整车质心侧偏角在短时间的波动后就平稳地过渡到稳定状态,虽然不稳定状态的波动时间与前馈-模糊反馈控制的4WIS大致相同,但汽车具有不足转向的趋势,有利于汽车在转向工况下维持车辆运行的稳定性。由图14可知:4WIS前馈-模糊PID反馈控制比4WIS前馈-模糊PID反馈控制的横摆角速度更加平稳,偏转量与波动时间几乎可以忽略。综上所述,在中速时,经4WIS前馈-模糊PID反馈控制提高了整车的稳定性,满足传统驾驶对稳定性的要求。
如图15所示,在120 km/h的车速行驶条件下,4WIS前馈-模糊PID反馈联合控制的整车质心侧偏角与4WIS前馈-模糊反馈联合控制的不稳定状态波动时间大致相等,但是前者的质心侧偏角偏转量与波动得到了较好的控制,控制效果更佳。如图16所示,4WIS前馈-模糊PID反馈控制的稳态横摆角速度增益相比4WIS前馈-模糊反馈控制时更接近理想值且不稳定状态波动更小,控制更平稳。

图15 120 km/h质心侧偏角对比

图16 120 km/h横摆角速度对比
4 结束语
利用四驱轮毂电动汽车具有四轮独立转向的特点,基于阿克曼转向几何模型,设计了基于阿克曼定理的前馈,在此基础上利用模糊PID控制策略搭建反馈控制器,对车辆进行联合控制,并考虑不同的附着路面对汽车在转向工况下行驶稳定性的影响。仿真结果表明:4WIS前馈-模糊PID反馈联合控制策略对汽车在转向工况下有较好的控制效果,满足驾驶员的驾驶要求。本文研究对车辆稳定控制研究具有积极的意义。
