远程诱骗型UUV掩护潜艇作战效能建模与仿真
2019-07-16刘海光
刘海光,李 伟,张 永
(海军潜艇学院 导弹兵器系,山东 青岛,266199)
0 引言
远程诱骗型无人水下航行器(unmanned undersea vehicle,UUV)是一种主动使用,自主工作,通过模拟潜艇特性,诱骗反潜飞机、水下监听系统等反潜兵力及装备,以掩护或协同潜艇作战,提升体系作战能力的新型水下信息战武器。其与现有自航式诱饵在使命任务、作战范围、指控模式等方面存在显著区别[1-2]。现有自航式声诱饵主要诱骗水下来袭鱼雷,一般以诱骗成功概率为其效能评价指标,其效能分析一般方法为:通过构建诱饵与来袭鱼雷相对运动模型,基于诱饵性能,研究在不同态势情况下诱饵对来袭鱼雷的诱骗概率[3-5]。
远程诱骗型 UUV作战目的是为提升体系作战能力,其作战对象为敌各种反潜平台,评价其作战效能应将其纳入作战体系中,不单考虑其对反潜兵力的诱骗成功概率,更应从作战整体考虑其所掩护潜艇作战任务的达成,因此,现有自航式声诱饵的效能分析方法不适用于远程诱骗型UUV。目前针对远程诱骗型UUV作战效能方面的研究较少,文献[6]依据现有经验,分析远程诱饵对敌反潜体系的影响,应用权重分析法比较了使用与不使用远程诱饵 2种情况下潜艇突破封锁的概率变化,该方法对经验数据依赖大,相关经验数据获取相对困难,甚至无法获取,一定程度上限制了该方法的应用。文中结合远程诱骗型UUV掩护潜艇作战的过程及目的,提出远程诱骗型UUV对抗反潜兵力作战效能指标,以反潜兵力搜索发现目标概率模型为基础,建立多枚诱饵诱骗反潜兵力的诱骗概率及牵制时间模型,构建典型作战想定模型,仿真分析其在掩护潜艇作战中的作战效能,给出作战效能影响因素。
1 掩护潜艇作战效能指标选取
远程诱骗型 UUV可以主动使用,实施大纵深远程机动,通过干扰、欺骗等手段与敌反潜平台进行信息对抗,扰乱敌海上侦察特别是反潜探测体系,调动消耗反潜兵力,从战役层面协同掩护主要兵力(如潜艇)完成作战任务,其从作战意图、作战时间和作战空间等方面具有作战平台属性。远程诱骗型 UUV掩护潜艇作战的基本过程为:通过模拟潜艇特性,隐真示假,在一定时间内将敌反潜兵力诱骗至远离己方潜艇所处海域,保证己方潜艇兵力安全突破敌封锁区,以达成作战目的。
这种情况下评估远程诱骗型 UUV的作战效能,不但要考虑其对敌反潜兵力的诱骗概率,更应从作战体系整体来考虑潜艇突破成功率,因此,应选取潜艇突破封锁区成功概率作为远程诱骗型UUV掩护潜艇作战效能评价指标。
2 诱骗反潜兵力作战效能模型
2.1 单枚诱骗型UUV诱骗反潜机
由反潜巡逻机反潜工作方式可知,在反潜巡逻机巡逻搜索模式下,主要靠雷达搜索目标,反潜巡逻机对目标的搜索发现概率与远程诱骗型UUV诱骗反潜巡逻机的成功概率属于对同一事物不同侧面的描述[7-8]。远程诱骗型UUV在一定海域均匀分布时,其成功诱骗反潜巡逻机的概率按下式计算[9-10]
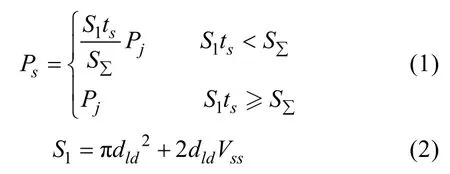
式中:S1为反潜巡逻机单位时间内搜索面积;ts为反潜巡逻机搜索时间;S∑为须搜索的海域面积;Pj为雷达探测信号接触目标概率;dld为雷达发现目标距离;Vss为反潜巡逻机搜索速度。
反潜巡逻机使用雷达搜索发现目标时,远程诱骗型 UUV可监测到反潜巡逻机信号,并模拟潜艇实施下潜规避。考虑到远程诱骗型 UUV目标特性较小,反潜巡逻机很难通过雷达信号确定目标准确位置,随即使用声呐浮标确定目标位置,此时目标概略位置已知,使用浮标成功发现目标概率可按下式计算[8,11]
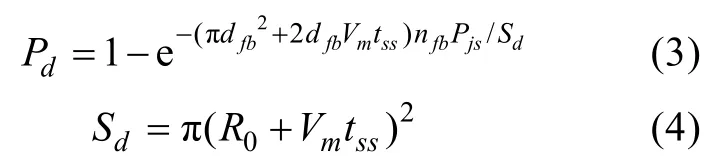
式中:dfb为浮标有效作用距离;Vm为目标速度;nfb为浮标数量;Pjs为能接触到并能识别的概率;Sd为使用浮标搜索面积;tss为反潜巡逻机使用浮标搜索时间;R0为巡逻开始时目标所处圆的半径。
使用雷达与使用浮标是 2个连续的过程,无论使用浮标探测结果如何,从作战效果来说远程诱骗型 UUV已经成功完成了一次诱骗。因此首次诱骗成功概率P1只与诱骗雷达成功率有关,即可计算为

反潜巡逻机在使用浮标探测目标时,一般会使用主动声呐浮标。当远程诱骗型 UUV探测到主动声呐浮标信号后,会降低甚至关闭模拟信号并采用战术动作实现匿迹,使得反潜巡逻机丢失目标信号。远程诱骗型UUV在判断为成功摆脱反潜巡逻机后,会再次开启模拟信号,以便让反潜巡逻机再次发现,如此反复。反潜巡逻机丢失目标后,往往会再次使用浮标搜索,再次搜索发现概率可按式(3)计算。
从远程诱骗型 UUV被反潜巡逻机雷达发现,到反潜巡逻机使用完一次浮标阵的过程称为远程诱骗型 UUV的一个战术对抗周期Td。战术对抗周期也就是诱骗型 UUV对反潜兵力的牵制时间,由于反潜巡逻机的机动性很强,一个战术对抗周期的时间主要是布放浮标并进行目标探测的时间。假设在不同对抗周期内反潜巡逻机有效识别假目标的概率相等且为Psb,则反潜巡逻机对目标进行再次搜索的可能性可定为1-Psb,则连续2次诱骗概率为

由此可以得到连续n次成功诱骗的概率为

远程诱骗型 UUV与反潜巡逻机一次对抗过程一般会经历若干个对抗周期。在假定每次使用浮标阵时间相同的情况下,则实施k次诱骗的牵制反潜巡逻机时间是kTd,假定一架反潜巡逻机最多使用浮标声呐的次数为 4次,在反潜巡逻机航程满足要求的情况下,针对一架反潜巡逻机的一次任务中,单枚远程诱骗型 UUV对反潜巡逻机平均牵制时间

2.2 多枚远程诱骗型UUV诱骗反潜巡逻机
使用多枚远程诱骗型UUV对反潜巡逻机实施诱骗时,为增大诱骗成功概率,多枚远程诱骗型UUV在同一海域平均分布,且间距较大,不会发生2枚以上远程诱骗型UUV被同时发现,且远程诱骗型UUV间完全独立,至少有1枚远程诱骗型UUV被雷达发现的概率可按下式计算
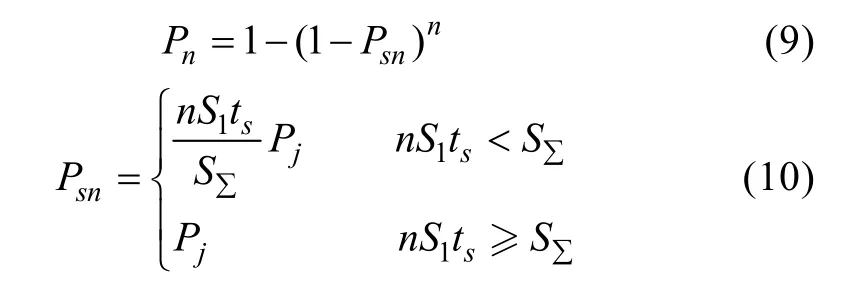
式中:n为使用远程诱骗型UUV的数量;Psn为使用雷达发现远程诱骗型UUV的概率。
在远程诱骗型 UUV的间隔大于浮标与反潜巡逻机通信距离的情况下,不会发生 2枚以上远程诱骗型 UUV被同时定位,通过以上分析可知,发生1枚远程诱骗型UUV被成功定位的概率

依据单枚远程诱骗型 UUV的情况分析,则使用n枚远程诱骗型UUV时,首次诱骗反潜巡逻机成功概率为

在远程诱骗型 UUV技术状态不变或相同环境下,连续k次诱骗成功后的牵制时间是kTd,假设敌反潜巡逻机每次有效识别假目标的概率为Psb。反潜巡逻机在判断为假目标后,放弃使用浮标声呐搜索,继续使用雷达搜索,假定反潜巡逻机使用浮标定位搜索的次数最大为 4次,平均牵制时间Tk平均有表1所示的8种情况,其中L表示使用雷达搜索,F表示使用浮标搜索,出现概率表示当前情况发生的概率。
2.3 远程诱骗型UUV诱骗水下监听系统
根据现有资料分析,在一定的海洋环境下,水下监听系统对处于其作用范围内的目标发现概率是时间的函数,时间越长发现概率越大[12],文中只考虑时间对发现概率的影响,假定发现概率与目标处于有效范围的时间成正比,在单位时间内发现处于其作用区域的目标概率为a,则水下监听系统发现目标概率
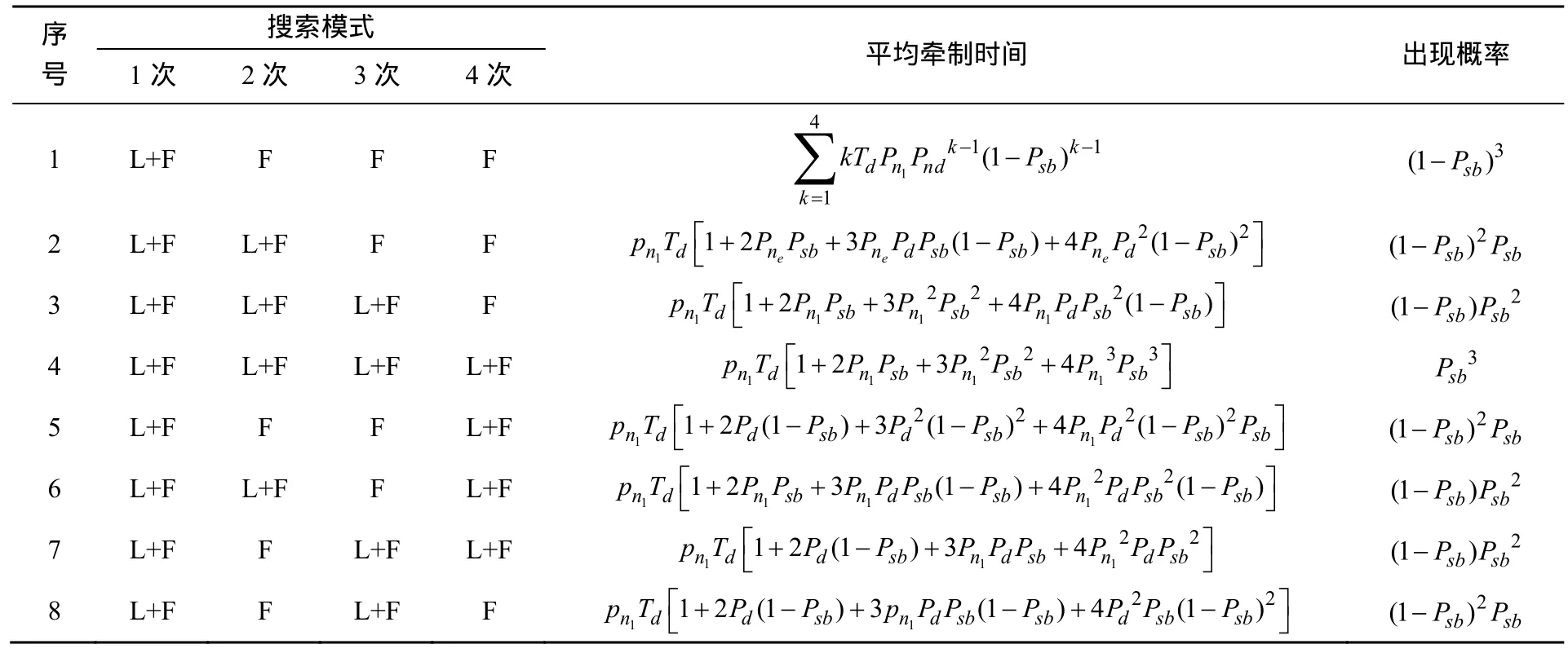
表1 多枚远程诱骗型无人水下航行器平均牵制时间Table 1 Average diversion time of multiple long-range decoy unmanned undersea vehicles(UUVs)
式中,t为远程诱骗型UUV处于水下监听系统有效作用区域的时间。
3 掩护潜艇作战效能分析
3.1 作战想定
作战想定:如图1所示,航道A、B为潜艇2条突破航道,敌方在航道外围布设有水下监听系统,同时反潜巡逻机沿航道外围进行不间断巡逻侦察。当监听系统检测到潜艇信号后,将信息传递给反潜巡逻机,反潜巡逻机随即实施应召反潜。远程诱骗型UUV规划从A航道模拟潜艇通过,诱骗敌反潜巡逻机前往,与此同时潜艇择机从B航道突破。
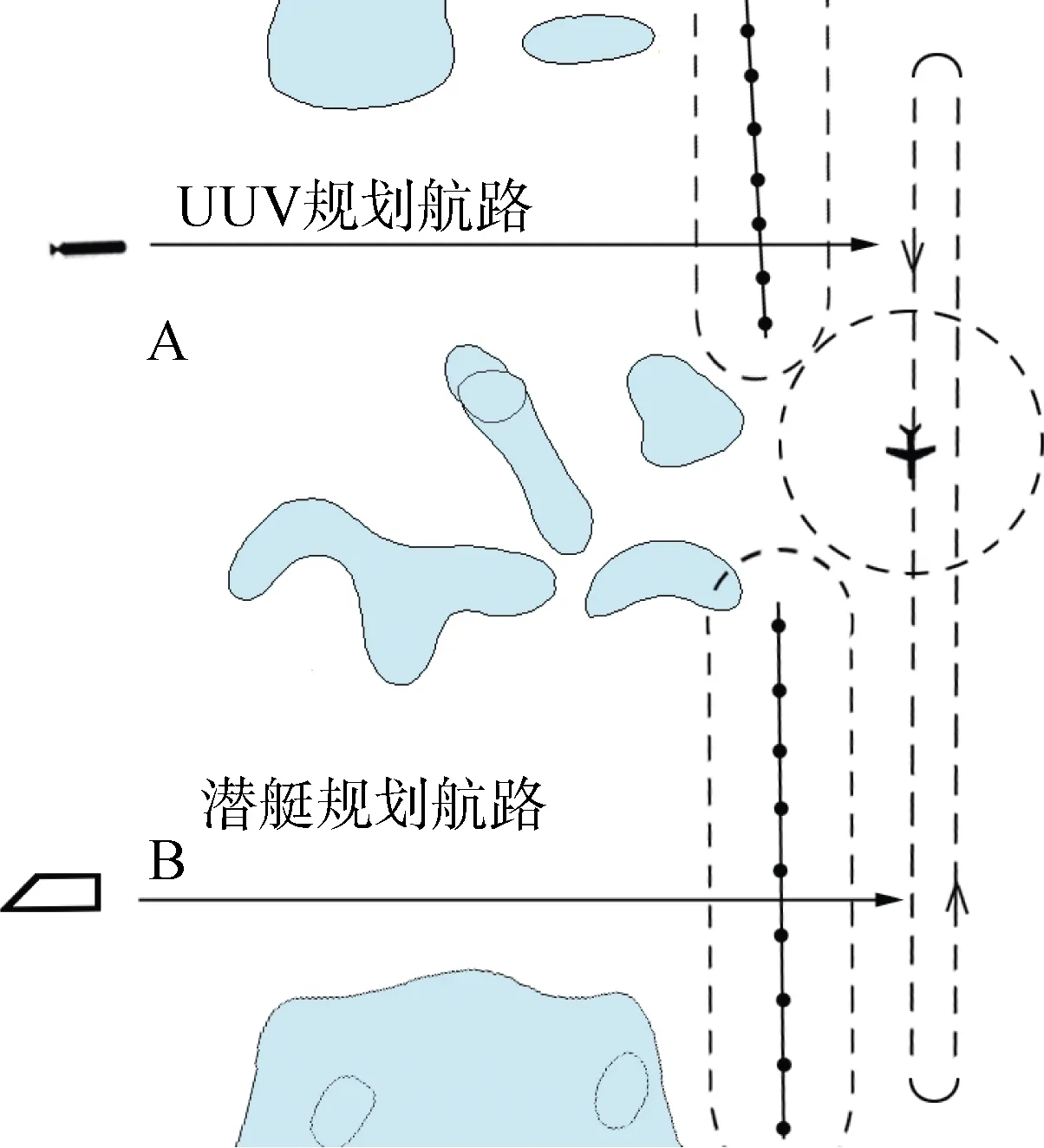
图1 掩护潜艇想定图Fig.1 Scenario sketch map of covering submarine
在没有应召信息的情况下,反潜巡逻机沿着巡逻线飞行,并以自身发现目标信号为依据实施反潜。如果同时有 2个目标信息,反潜巡逻机采用就近原则实施反潜作业。反潜巡逻机在执行应召反潜任务的过程中,在判明当前目标性质之前,不再执行新的反潜任务。
潜艇突破水下监听系统的距离大于1.5倍的反潜巡逻机发现距离后,没有被反潜巡逻机发现,可以认为潜艇成功突破,在此之前若反潜巡逻机发现潜艇,则认定潜艇突破失败。
反潜巡逻机沿南北长300 n mile航线直线往复搜索,巡逻线距离水下监听系统15 n mile。反潜巡逻机巡航速度为 300 kn/h,雷达对远程诱骗型UUV的最大发现距离为5 n mile,单个浮标作用距离为2 n mile。水下监听系统对潜艇和远程诱骗型UUV的有效作用距离为15 n mile。假定在1 h内水下监听系统发现处于其作用区域的目标概率为 0.4,反潜飞机有效识别假目标的概率为0.3。
3.2 作战想定建模
根据上述作战想定,构建模型如图2所示。
潜艇与远程诱骗型UUV初始位置横坐标为0,潜艇初始位置纵坐标在0~100 n mile随机选取,远程诱骗型UUV初始位置纵坐标在200~300 n mile随机选取;潜艇及远程诱骗型UUV航向与X轴夹角为0。当远程诱骗型UUV横坐标大于150 n mile时,开始诱骗反潜巡逻机。水下监听系统阵列位置:X为150 n mile处,沿Y轴方向分布。每段长度100 n mile,2段间隔100 n mile。
反潜巡逻机巡逻线位置:X为165 n mile处,沿Y轴分布,航线长度为300 n mile。反潜巡逻机沿监听阵外沿往返飞行,初始位置随机确定。
3.3 仿真计算
1)使用单枚远程诱骗型UUV协同突破
基于以上作战想定及计算模型,使用单枚远程诱骗型 UUV,在远程诱骗型 UUV和潜艇选择不同航速情况下,利用蒙特卡洛法进行仿真,潜艇突破成功概率与潜艇及远程诱骗型 UUV航速的关系如图3所示。
2)使用2枚远程诱骗型UUV协助突破
为提高潜艇突破概率,模拟同时使用 2枚远程诱骗型UUV实施诱骗,2枚远程诱骗型 UUV起始点随机分布,且间距大于反潜飞机的发现距离,两诱饵纵坐标间距大于 2倍的反潜飞机发现距离,突破成功概率与潜艇及远程诱骗型 UUV航速的关系如图4所示。
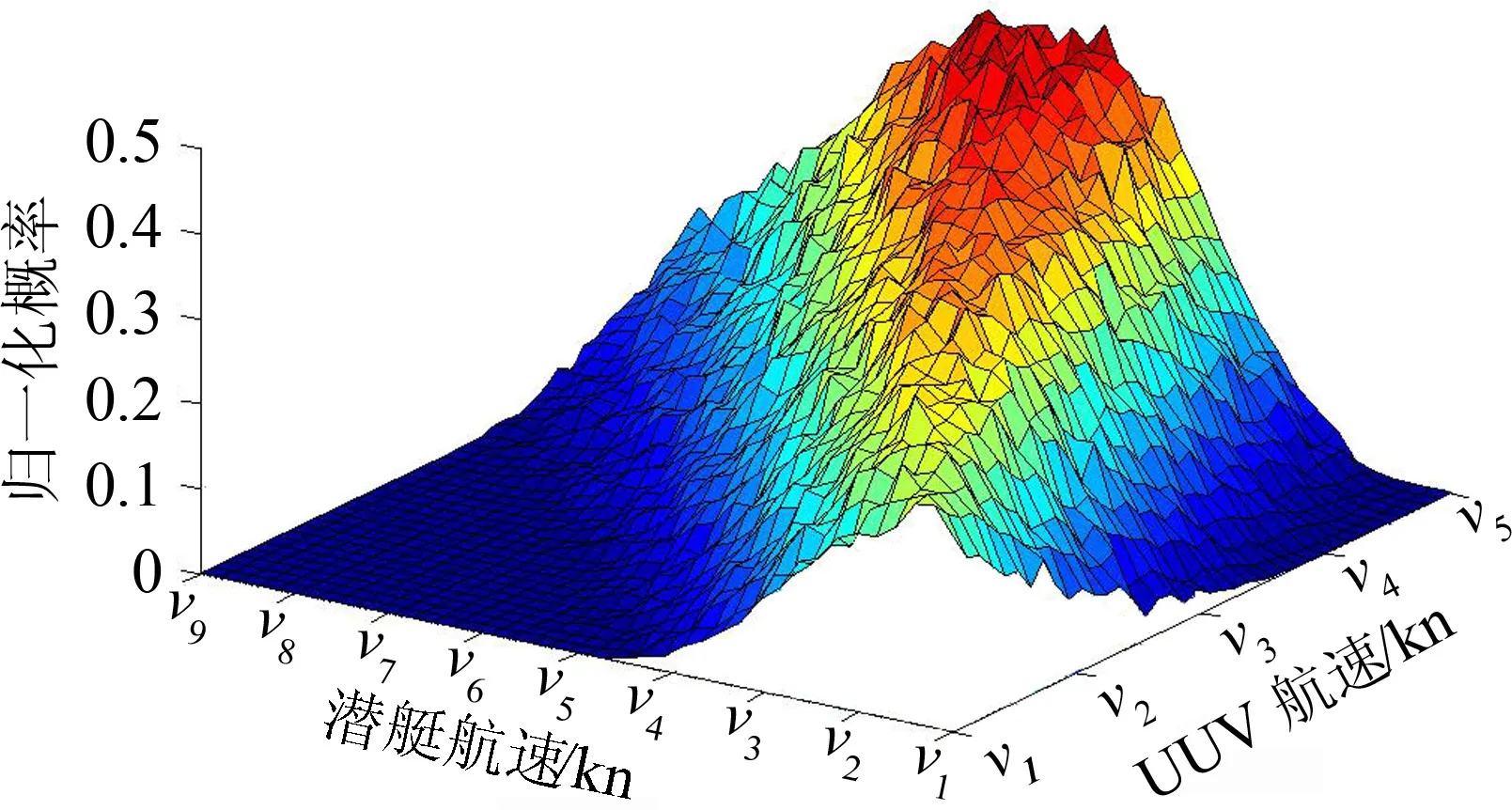
图3 突破概率与潜艇及单枚UUV航速关系Fig.3 Relations of breakthrough probability with speeds of submarine and single UUV
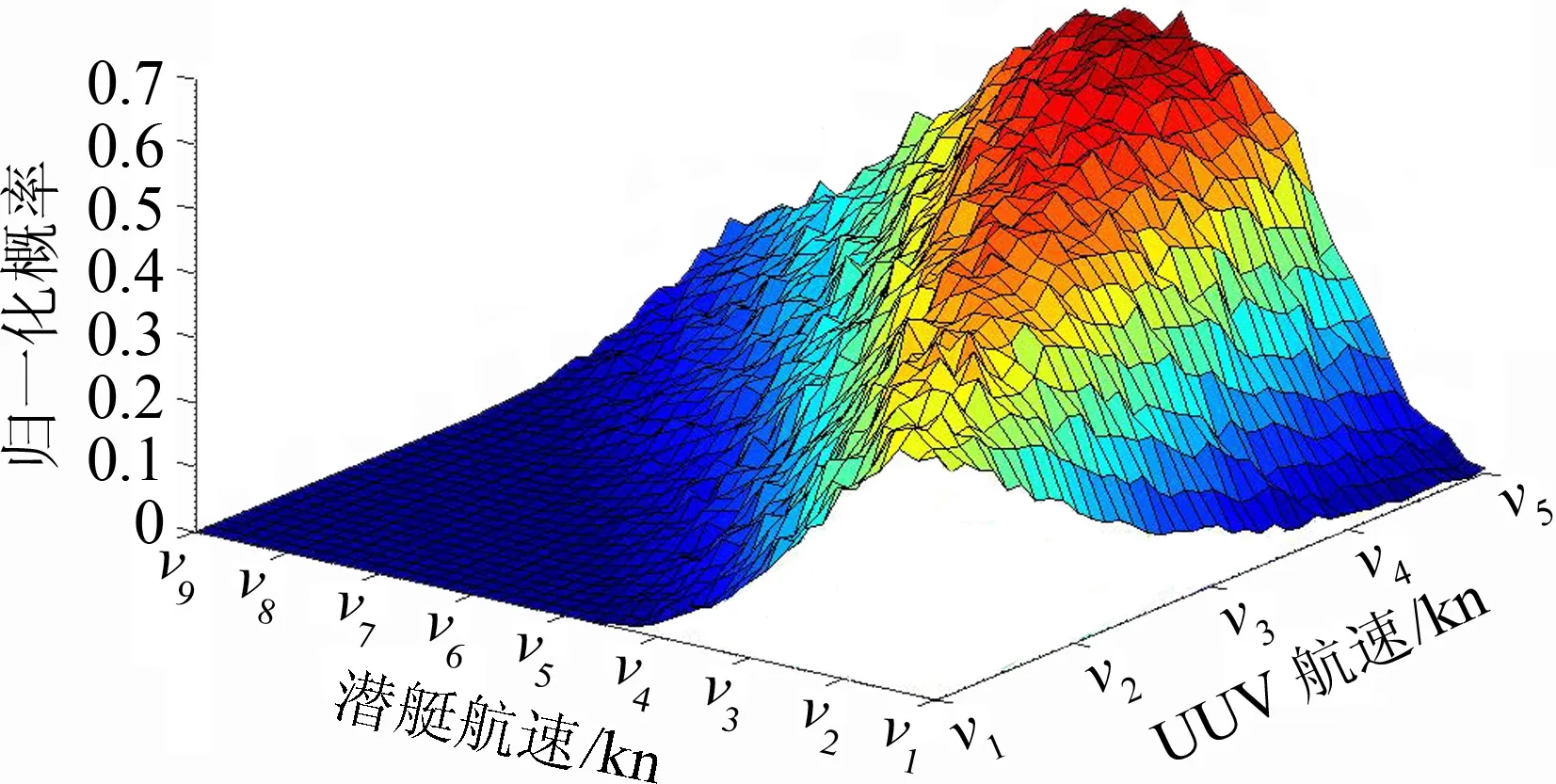
图4 突破成功率与潜艇及2枚UUV航速关系Fig.4 Relations of breakthrough probability with speeds of submarine and two UUVs
3)防守相对不严密情况下的突破
将想定条件改变如下:2条监听线长度改为200 n mile,间隔为200 n mile,敌反潜巡逻机航线长为600 n mile。潜艇初始位置纵坐标在0~200 n mile内随机选取,远程诱骗型 UUV初始位置纵坐标400~600 n mile内随机选取。使用2枚远程诱骗型 UUV,在其他条件不变情况下突破成功概率与潜艇及远程诱骗型 UUV航速的关系如图5所示。
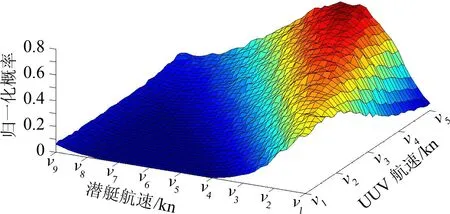
图5 防守不严密情况下突破概率与潜艇及2枚UUV航速关系Fig.5 Relations of breakthrough probability with speeds of submarine and two UUVs in the case of untight defense
3.4 结果分析
1)潜艇速度与远程诱骗型 UUV速度差别较大时(相当于不使用远程诱骗型 UUV)潜艇突破概率较低,在远程诱骗型UUV掩护下,潜艇成功突破概率有了明显提升。
2)使用单枚远程诱骗型 UUV,由于牵制反潜巡逻机的时间相对较短,当潜艇速度和远程诱骗型UUV速度相当时,即当远程诱骗型UUV与潜艇几乎同时到达封锁线时,突破成功概率较高,而当潜艇速度小于或大于远程诱骗型 UUV速度时,即当两者不同时到达封锁线时,突破成功率明显下降,因此,这种情况下,远程诱骗型 UUV和潜艇需要相互配合,实现几乎同时通过封锁区域,此时远程诱骗型 UUV被发现后才能牵制敌反潜巡逻机,两者到达水下监听系统的时间差越大,潜艇突破成功率就越低。
3)使用 2枚远程诱骗型 UUV,随着牵制反潜巡逻机时间变大,突破成功概率明显提高。突破概率的最高点集中在远程诱骗型 UUV速度略高于潜艇速度情况下,表明当牵制时间变大时,可以让远程诱骗型 UUV首先达到封锁区,将反潜巡逻机吸引到远程诱骗型 UUV工作区,潜艇再择机突破。因此在战术使用时,可根据远程诱骗型UUV使用数量决定突破战术。
4)在敌防守严密的情况下,不使用远程诱骗型UUV,潜艇成功突破的可能性较低。在敌防守不严密,潜艇单独突破的成功概率较高时,在保证隐蔽性的情况下,潜艇应选择以较高的速度突破。
5)在使用远程诱骗型UUV掩护突破时,当远程诱骗型UUV牵制反潜巡逻机时间小于潜艇突破反潜封锁带时间时,应让远程诱骗型 UUV与潜艇同时到达封锁线;当远程诱骗型UUV牵制反潜巡逻机时间大于潜艇突破反潜封锁带时间时,应让远程诱骗型 UUV先到达封锁线,产生诱骗效果,潜艇再择机突破,远程诱骗型UUV牵制反潜巡逻机的平均时间相较潜艇突破反潜封锁带的时间越大,远程诱骗型UUV先到达封锁带时间就可以越早;同时应尽可能加大潜艇的突破速度。
4 结束语
文中通过分析远程诱骗型 UUV掩护潜艇作战目的及过程,提出了远程诱骗型 UUV掩护潜艇突破反潜封锁作战效能评价指标,建立了单枚及多枚远程诱骗型 UUV诱骗不同反潜兵力概率模型和牵制时间模型,构建了远程诱骗型 UUV协助潜艇突破反潜巡逻机与水下监听系统所组成的反潜体系作战效能模型。根据典型作战想定,对使用远程诱骗型 UUV掩护潜艇作战进行了仿真,检验不同条件下潜艇突破成功概率,潜艇突破岛链成功率与战场环境、远程诱骗型 UUV的使用数量、敌防守兵力、采用的突防战术等因素有关,并提出了提升潜艇突破成功概率的方法和措施。仿真结果表明,所建模型对效能影响因素表达较为全面,对经验数据依赖较少,具有较高的适用性。但是,文中只分析了反潜巡逻机、水下监听系统2种反潜兵力联合反潜情况下远程诱骗型 UUV掩护潜艇突破封锁的作战效能,尚没有研究远程诱骗型 UUV诱骗反潜水面舰艇、反潜直升机等其他反潜兵力的作战效能,有待进一步展开研究,便使研究结论更具普遍性,更符合战场实际。
相关文章导航
1.邓新文,朱文振,谢勇.潜艇转向旋回防御主动声自导鱼雷的战术意义与作战运用[J].水下无人系统学报,2019,27(1).
2.杨智栋,李荣融,蔡卫军,等.国外水下预置武器发展及关键技术[J].水下无人系统学报,2018,26(6).
3.岳玲,樊书宏,冯西安.鱼雷协同制导对水声通信能力的需求分析[J].水下无人系统学报,2018,26(5).
4.钟宏伟,李国良,宋林桦,等.国外大型无人水下航行器发展综述[J].水下无人系统学报,2018,26(4).
5.李华,张静.远声自导鱼雷二次转角作战使用方法[J].水下无人系统学报,2018,26(4).
6.曹萌,倪文玺,蒋继军.反鱼雷鱼雷全弹道数学仿真系统设计与应用[J].水下无人系统学报,2018,26(3).
7.林龙信,张比升.水面无人作战系统技术发展与作战应用[J].水下无人系统学报,2018,26(2).
8.董金鑫,张东俊,张磊,等.UUV试验评估组织执行体系构建与思考[J].水下无人系统学报,2018,26(1).
9.聂卫东,马玲,张博,等.浅析美军水下无人作战系统及其关键技术[J].水下无人系统学报,2017,25(5).
10.钟宏伟.国外无人水下航行器装备与技术现状及展望[J].水下无人系统学报,2017,25(4).
11.钱东,赵江,杨芸.军用UUV发展方向与趋势(下)——美军用无人系统发展规划分析解读[J].水下无人系统学报,2017,25(3).
