燃料装卸系统主循环控制程序的现场调试
2019-07-12周树桥黄晓津
周树桥,于 晖,黄晓津
(清华大学核能与新能源技术研究院,先进核能技术协同创新中心,先进反应堆工程与安全教育部重点实验室,北京 100084)
0 引言
高温气冷堆核电站示范工程(high temperature gas-cooled reactor pebble-bed module,HTR-PM)是我国拥有完全自主知识产权的、具有第四代特征的先进核能系统。无需停堆换料是高温气冷堆的独特优点。该功能是由燃料装卸相关工艺系统实现的[1-2]。燃料装卸主循环涉及球形元件从堆芯卸出和气力提升回堆芯,是整个燃料装卸流程中的关键[2-3]。基于HTR-PM的现场调试经验,本文主要阐述燃料装卸主循环控制流程的调试经验,着重阐述辐射测量过程在分布式控制系统(distributed control system,DCS)[4-5]上的模拟和关键工艺参数的调试。经现场调试和试验验证,确认了主循环复杂控制流程可实现稳定的元件循环,相关的控制策略和参数配置可以使流程得到优化。
1 燃料装卸工艺系统及其控制设计
HTR-PM含两个反应堆。针对两个反应堆,分别配备有成套的燃料装卸系统设备,主要有主循环相关设备、辐射测量设备、新燃料供应设备、乏燃料卸出设备、氦气压缩机、抽真空相关设备,以及其他相关的气力输送设备。其中,主循环相关设备和燃耗测量设备为两个反应堆分别独立配置,其余管道和设备多为两堆共用。针对各工艺设备和流程的控制和监测需求,配备有多台DCS控制柜和扩展柜。燃料装卸工艺实现的功能为:匹配反应堆各个阶段的运行需求,将球形燃料(及石墨)元件[6-7]装入和卸出堆芯。实现这个功能目标对应可分解的工艺流程主要包括:新燃料送入堆芯、卸料主循环、辐射测量、元件卸出流程、气力输送、气氛切换、设备及管道吹扫等流程。其中,主循环流程在反应堆功率运行阶段需要实现每天数千个球形元件的循环和提升回堆芯动作,同时需新装入数百个新燃料元件和卸出数百个乏燃料元件,动作频次高、持续时间长,是燃料装卸的关键流程。
1.1 燃料装卸系统主循环的设备组成
燃料装卸主循环部分主要由一体化卸料装置(实际含两路卸料设备,可分别独立启停和运行)、碎球分离装置、桥联装置、辐射测量定位器、装料输送装置,以及管道上部署的计数器、压力边界对应的隔离阀门等设备组成。燃料装卸主循环流程如图1所示。
主循环流程可阐述为:卸料装置从反应堆堆芯卸出球形元件(包括燃料元件和石墨元件),经碎球分离装置进行碎球分选。其中:碎球将储存在碎球罐中,完好的球形元件将经管道到达辐射测量定位器前。球形元件由辐射测量定位器定位后,DCS发送相应的指令启动燃耗测量流程[8-9]。燃耗测量完毕后,将基于燃耗测量结果确定球形元件输送方向:如果为石墨元件或乏燃料,将由辐射测量定位器将输送方向动作至乏燃料卸料管段,经后续乏燃料卸出设备和管段卸出;如果为未达到相应燃耗的燃料元件,将由辐射测量定位器将输送方向动作至回堆芯管段,由气力提升送回堆芯。主循环的设备部署为两个列。两个列可独立运行(后续未明确说明的情况下,默认描述对象为其中的1个列)。此外,两个列之间还部署有桥联器,可实现桥联器上游一列供料、下游两列同时进行辐射检测和提升。
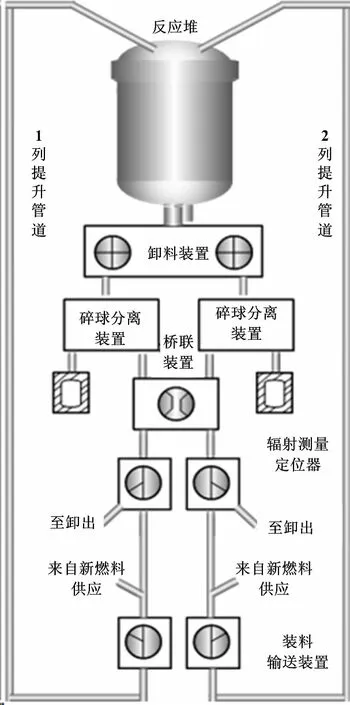
图1 燃料装卸主循环流程图
1.2 主循环流程自动控制要求和设计
主循环流程每天需要卸出和循环的球形元件超过数千个。每个球形元件均需在限定时间内完成从堆芯卸出、碎球分选、辐射测量和提升过程,流程控制过程中涉及的动作繁多,且实时性要求高。
为尽可能提高运行实时性,针对主循环流程进行了分段解耦合控制,将整个流程划分为三个子工艺段进行控制。
①卸料流程控制段。从卸料装置开始至辐射测量定位器止,主要实现的功能为球形元件卸出和碎球分选。
②球形元件燃耗测量控制段。该工艺段主要包括辐射测量定位器,以及辐射测量定位器至装料输送装置对应的管段。对应功能为:由辐射测量定位器对待测球形元件进行定位,然后可启动专门的燃耗测量设备进行燃耗测量,并监测燃耗测量设备的测量结果;依据测量的结果,由辐射测量定位器送往乏燃料卸出方向或者送往回堆芯的管道。
③提升控制段。该工艺段主要包括装料输送装置和提升管段。对应操控的流程为:当装料输送装置前有球形元件待提升且提升管段中可接受新送出的元件,则操控装料输送装置送出一个球形元件至提升管段。
为实现上述三个流程的并行运行和相互衔接,针对每个卸料和提升列,分别定义了如下三个特别关键的变量:辐射测量定位器前暂存元件数、装料输送装置前待输送元件数、提升管道中正被提升的元件数。
2 控制流程现场调试
2.1 调试准备工作
通过调试试验前的工前会,对主循环调试的人员、设备、资料等进行了部署和准备[10-11],并且着重开展了主循环相关单体设备在主控室的远程操控确认。具体准备工作如下。①针对主循环自动控制流程所需操控的卸料设备、碎球分离器、桥联装置、辐射测量定位器、装料输送装置、隔离阀、气路对应的相关设备,进行了远程手动操控,确认了设备动作方向、动作幅度(如卸料装置和碎球分离装置的转速反馈)与设计文件一致且与设计初衷匹配。②对其模拟量反馈是否可在主控室显控台正确显示进行了确认。③配合工艺系统设备的设计师,进一步进行了设备标定(尤其是计数器的标定)。基于此,为自动控制程序的运行奠定了基础。
2.2 元件辐射测量过程在DCS上的仿真模拟
在燃耗测量环节[6-7],辐射测量定位装置进行定位后,由DCS启动辐射检测过程并等待辐射检测返回。辐射检测完毕并反馈对应结果后,DCS再操控辐射测量定位装置执行送往堆芯或者送往乏燃料管道的动作。不同类型的球形元件对应辐射测量所需的时间不同,对应DCS需等待的时间也不同。具体为:石墨元件的检测时间为T1、浅燃耗燃料元件的检测时间为T2、深燃耗燃料元件以及乏燃料元件的检测时间为T3。三者关系为T3>T2>T1。
在过渡循环运行阶段,一般待检测的元件为石墨元件和浅燃耗的燃料元件,对应不同的出现概率:需要检测T1就可以确认的石墨元件出现概率为p1;需要检测T2即可确认的浅燃耗燃料元件出现概率为p2。在功率运行阶段,一般待检元件为各类燃料元件(包括浅燃耗燃料元件和深燃耗燃料元件)和乏燃料元件,对应不同的出现概率:需要检测T2就可以确认的浅燃耗燃料元件出现的概率为p3;需要检测T3才能确认的深燃耗燃料元件概率为p4;对应需要检测T3才能确认的乏燃料元件概率为p5。
开展燃料装卸系统主循环试验时,燃耗测量系统的燃耗测量设备还未投入使用,且堆芯中装载的全部为石墨元件。因此,需要对燃耗测量过程对应的动作进行仿真模拟。具体的模拟方式为:在辐射测量定位器前暂存元件数大于0且下游“装料输送装置前待输送元件数”不超限的情况下,将延时一段时间启动辐射测量定位器,并将元件送往其后的暂存管道。在实际运行过程中,如果在过渡循环阶段检测到石墨元件或在功率运行阶段检测到乏燃料元件时,辐射测量定位器会将该元件送至元件卸出管段。此时,对应变量-装料输送装置前待输送元件数-在辐射测量定位器动作至卸料管段方向后,将不会直接递增,而是在辐射测量定位器返回后才恢复主循环顺控。因此,需要补充添加辐射测量定位器动作时间(假设为Tdelay)。调试时需模拟的阶段及对应参数如表1所示。

表1 调试时需模拟的阶段及对应参数
基于此,设毫秒级整形数模N运算的结果为X:当X 摸索确认关键工艺参数是主循环调试试验的重点。这包括1.2节所述的三个特别关键的变量,以及主循环的中的协调送球模式。 2.3.1 确定暂存变量限值的必要性 辐射测量定位器前暂存元件数、装料输送装置前待输送元件数和提升管道中正被提升的元件数这三个变量,是实现主循环复杂控制流程解耦控制的关键变量。同时,每个变量还分别对应了一个上限限制值,分别为:辐射测量定位器前暂存元件数限值、装料输送装置前待输送元件数限值和提升管道中正被提升的元件数限值。如1.2节所述,当各变量达到对应限值时,需要对应的控制段的自动控制程序执行相应的动作。从降低流程耦合的角度而言,各限值越大,对应管道可以暂存的球形元件数越多,越有利于减少流程间的耦合。但是,在HTR-PM功率运行阶段,球形元件中大多为带有较大放射性的燃料元件或乏燃料元件,而从辐射防护的角度需尽可能减少管道存球。因此,希望各个限制值尽可能小。鉴于此,各个限值的合理取值有必要在调试过程中确定。 2.3.2 确定暂存变量限值 ①各个关键暂存变量对应限值的配置。 在主控室人机界面上设置了各个暂存变量限值的手动输入接口,以支持调试时操纵员进行相应的配置。操纵员进行相应的配置后,将直接更新画面组态后台对应的限值变量。主循环自动控制程序将按照新配置的变量运行。配置值提供默认选择,在操纵员未进行选择时,自动控制程序按照默认值运行。 ②关键变量的实时显示。 为进行主循环流程的调试,在主控室人机界面上添加了辐射测量定位器前暂存元件数、装料输送装置前待输送元件数、提升管道中正被提升的元件数、提升时间、上一次被检测的元件类型等重要变量的实时显示接口。调试时,调试人员和操纵员通过上述显示接口,可实时掌握各类试验模式下主循环流程的实际运行状态。 2.3.3 送球模式的调试 通过配置提升管道中正被提升的元件数限值,可以进行元件的单个或多个同时提升的模式切换。当元件提升模式为多个时,另行设置专门的配置接口,给装料输送装置附加动作触发条件(包括延时时间等),以获得最优提升模式。 燃料元件的自动循环是燃料装卸系统的核心功能,也是HTR-PM能够实现不停堆换料的支撑性功能。燃料装卸主循环试验是整个HTR-PM调试试验中的重要组成部分。经过几个月的现场调试,实现了由自动程序稳定控制球形元件循环超过一万次,并且获得了合适的各类关键的工艺运行参数、稳定高效的元件提升模式以及优化的卸料速度调节方式,为HTR-PM燃料装卸的正常运行奠定了良好的基础。同时,相关的在DCS平台上的仿真模拟方法以及控制策略,也可以作为同类系统设备设计和调试的参考依据。2.3 关键工艺参数的调试
3 结束语
