送餐服务机器人风险评估
2019-07-12张锋邹风山
文/张锋 邹风山
随着中国人口老龄化以及教育、医疗、公共服务和安全等方面的迫切需求,我国服务机器人市场潜力巨大。据中研预测到2020年服务机器人市场规模有望超过300亿元,家庭服务、商用场合等领域服务机器人将迎来爆发式发展。但机器人产品安全相关标准还未健全,因此机器人产品的安全取决于机器人生产商。机器人风险评估是机器人生产商必须实施的活动。特别是研发人员最初进行的风险评估是最重要的活动之一。对机器人实施风险评估,制定合理安全的设计目标,也是ISO机器人安全要求标准中规定的原则。
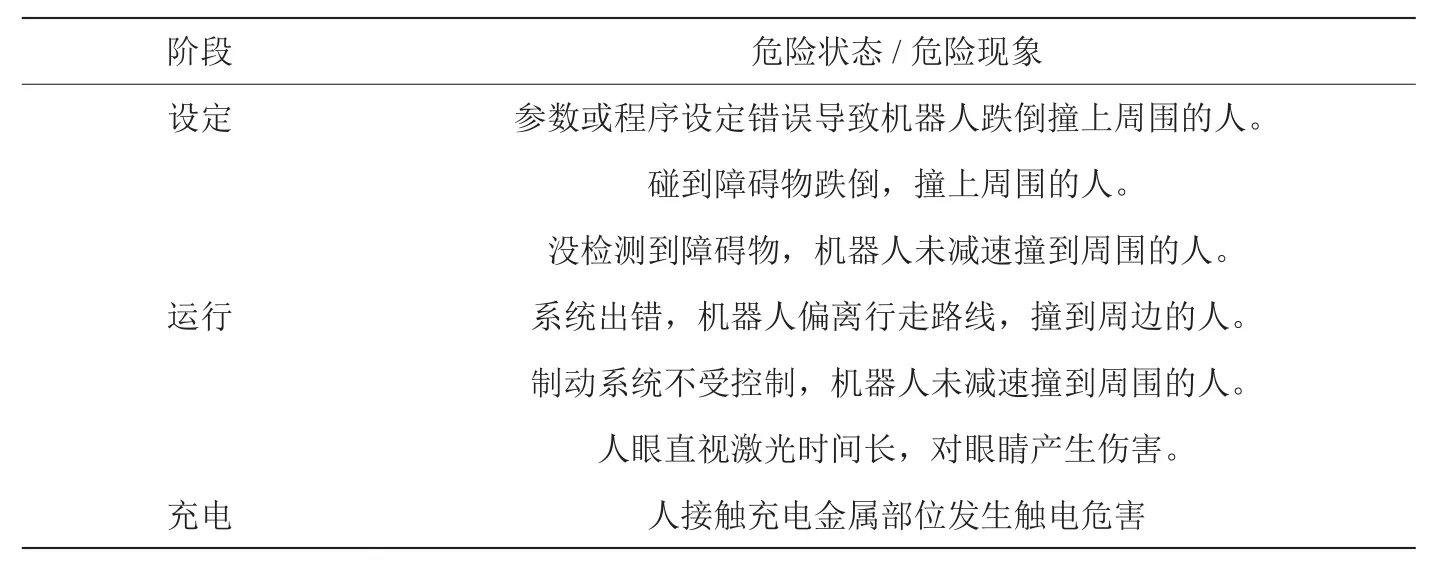
表1:危险列表
1 概述
机器人风险评估是以系统方法对与机器人有关的风险进行分析和评价的一系列逻辑步骤。风险评估通常包括以下步骤:
(1)机械限制的确定:确定各种限制,包括预定使用和任何可合理预见的误用;
(2)危险识别:识别危险及其伴随的危险状态;
(3)风险估计:针对每一种识别出的危险和危险状态;
(4)风险评价:评价风险并决定是否需要风险减小。
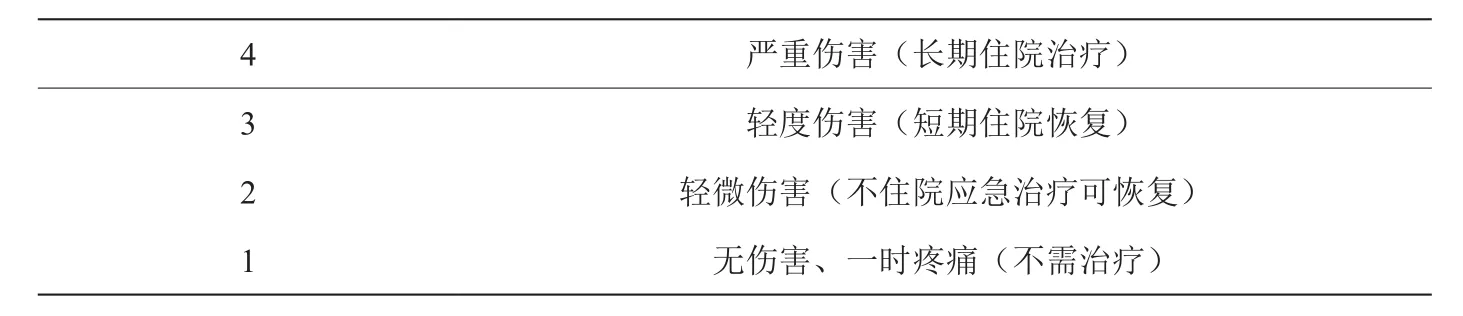
表2:伤害的严重程度S

表3:伤害发生的概率Ph
2 机械限制的确定
机械限制的确定是对送餐服务机器人的功能、性能等的基本规格确认。本文的送餐服务机器人可通过手动和自动模式运行,可自主壁障和自动充电,通过激光传感器等实现自主导航,具备语音交互、表情互动等功能。可由经过培训的服务人员操作,在餐厅等类似室内环境使用的重量60kg、高度140cm的机器人。
3 危险识别
危险识别是风险评估中最重要的步骤。只有危险被识别后才有可能采取行动,减小与之相关的风险,未被识别的危险可能导致伤害。目的是形成一份危险、危险状态和(或)危险事件的清单。送餐服务机器人危险清单见表1。
4 风险估计
风险估计的目的是确定每个危险状态的最高风险。对机器人进行危险识别后,通过伤害的严重程度S和该伤害发生的概率Ph两个风险要素进行风险估计。其中S等级见表2。Ph按下式计算,等级见表3。
伤害发生的概率(Ph) =人员暴露于危险的频度或时间(F) + 危险事件的发生概率(Ps)+ 避免或限制伤害的可能性(A)
5 风险评价
风险评价的目标是确定哪些危险状态需要进一步减小风险。风险评价推荐用数值评分法,用一个具体数值代表可接受的风险水平,能够为风险减小决定过程提供关键依据。选择一个数值要比使用定性术语更精确,更快的做出选择。风险评价采用风险分数R进行评分,R按下式计算,风险分数R见表4。
风险分数(R) = 伤害的严重程度(S)×伤害发生的概率(Ph)
是否需要进行风险减小的判断标准见表5。
针对表1中送餐服务机器人的每项危险,依据表2~表4进行评分,最后依据表5确定哪项危险需要风险减小。风险减小措施实施后重新风险评估,最终确保所有危险的风险等级为Ⅰ级(R≤6)。
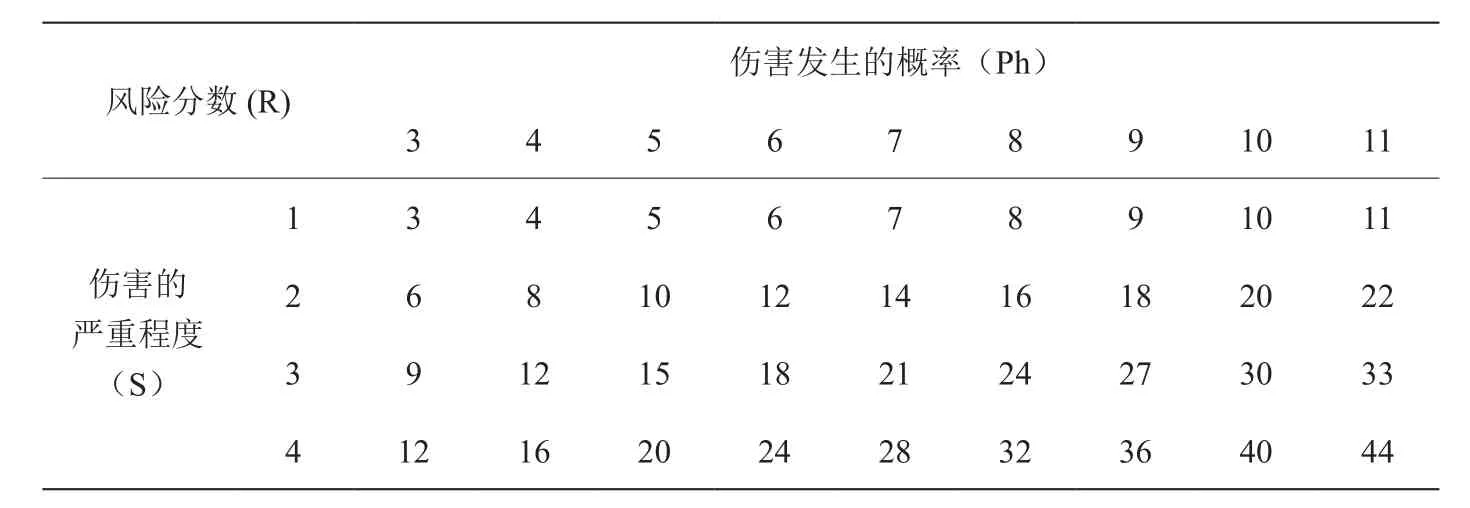
表4:风险分数R
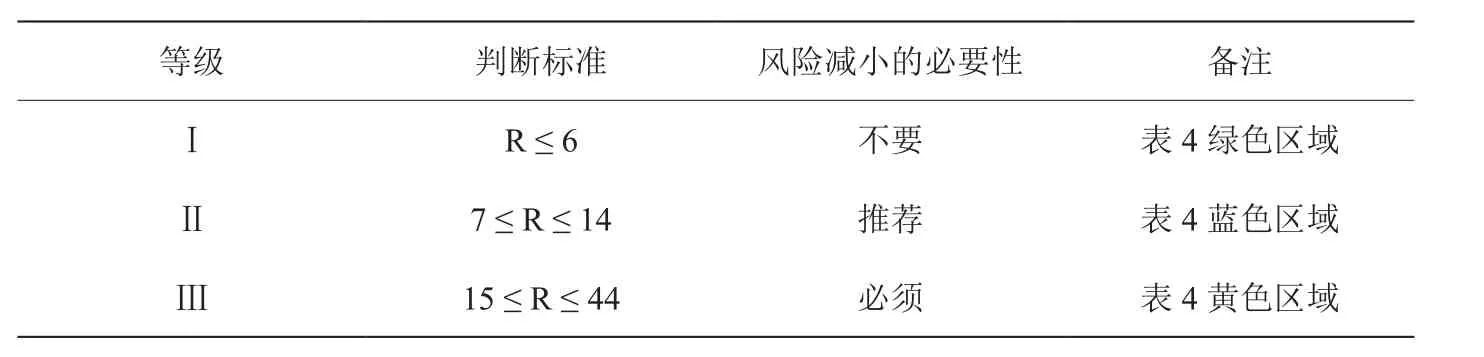
表5:风险减小判断标准
6 结语
服务机器人安全标准GB/T 36530-2018(ISO 13482:2014,IDT)在2019年2月实施。服务机器人风险评估可参考此标准附录A中的重大危险列表对机器人进行危险识别,依据第5章和第6章的安全要求设计相关的风险减小措施。
