基于物联网的泊车系统研究
2019-07-11吴新胜王荆茜刘超超
吴新胜 周 军 王荆茜 刘超超
(中共安徽省委党校(安徽行政学院、安徽经济管理学院) 安徽合肥 230001)
“智能停车引导系统”已在国外得到广泛应用[1],但国内只有少数停车场具有类似的停车引导系统。随着改革开放不断深入,人们的生活水平和科学技术应用发生了巨大的变化。随着汽车的普及,停车场的发展滞后,停车难的问题已经成为公众和政府迫切需要解决的问题。如何解决就近停车节约时间,如何找到合适的停车位置,这些问题催生了智慧泊车系统的需求。鉴于此研究智能停车管理系统是社会发展的需要。停车管理智能化、自动化、科学化、网络化、快速化、是建设智能小区和智慧城市的重要部分如图1所示。

图1 智慧泊车系统图
智慧停车系统通过大数据云服务,收集各个区域停车场停车位的信息。利用云将有关空车位信息传递到有需求的客户手机APP,实现停车位的实时服务。该系统主要用于各种类型的停车场。为了掌握停车位的停放车辆实际情况,每个停车位设置的传感器通过一定的通信方式连接到停车场管理控制计算机。控制计算机收集信息并进行数据处理,将停车空位数量信息传送给系统的控制器并发送到云端。
一、智慧泊车工作机理
未来城市智慧泊车系统由四大模块组成,一是车位检测模块,其中包含了云模块;二是车牌识别模块;三是AGV 小车模块[2];四是自动缴费模块。在车位检测模块中采用了PGA450-Q1探测器、楼层控制器等硬件设备;车牌识别模块采用EY-RHB02 牌照识别门禁一体机;AGV 小车以MK60 DN512 ZVLQ10作为中央处理器,它还具有许多传感器,如红外、激光/光电、电磁、超声波避障、速度等传感器。AGV车载模块分为三大模块,超声波障碍模块,无线充电电源模块,跟踪模块[3]。其中超声波壁障模块中采用STC89C52单片机为主控芯片,用陀螺MPU6050 和加速度计测量载体的角速率和加速度信息[4];自助缴费模块采用的是TBX-A2停车自助缴费机。整个停车场基于WINDOWS系统中运行,主要采用C++进行编译,下图2所示硬件原理图。

图2 硬件原理图
二、智慧泊车设计
(一)车位检测模块。实时检测车位的状态通过超声波探测的方法,只使用一个探头分区域检测,每256 个探测器的信息汇聚到一个集中控制器中。超声波测距距离软件可调,超声波增益软件可调,现场可配置超声波模块地址RS485通讯线路不超过1000米,根据车位状态,通过指示灯指示RGB灯光指示,颜色可软件任意定义(可选),支持总线通信。
(二)传入云端及客户端设计。车辆进出采集设备安装在停车场的出入口位置,采集设备通过CAN 总线与机房计算机网络连接。收集终端被指定为数据统计中心,并且每个收集终端可以通过RS485总线将每个停车场的剩余停车位发送到交通路口的LED停车位屏幕。或者通过云端向需求驾驶者发送有空车位信息,指导驾驶员沿最近路线到达相关的空停车位的停车场。
停车场收集系统不仅是城市停车场系统中最基本的数据采集单元,而且对指导停车场的正常运行和提高停车位的使用效率也带来直接益处。在停车场入口处或附近的停车信息由各个子系统直接管理,这降低了系统的复杂性并增强了系统的可靠性和易用性。内置的GPRS DTU模块可以通过GPRS,3G 和4G 网络实时收集的数据和空停车位数据的统计数据到互联网。服务器将为驾驶员提供每个停车场实时的停车位空位信息和相关路线的交通情况。在停车场的剩余停车位[3]上执行停车位的预留或取消预留停车位等。逐步建立统一的交通信息平台。一些共享信息可以在互联网上发布,以方便大众。平台通过呼叫中心,广播电台,电视台,手机GSM 消息和其他媒体提供的信息也可以提供最大的空间覆盖范围。
(三)车牌识别模块。车牌识别停车系统自动识别入口处摄像机拍摄的车牌号码图像并将其转换为数字信号。汽车牌照识别是一种模式识别技术,使用车辆动态视频和静态图像自动识别车牌号码和车牌颜色。通过图像的采集然后从图像中提取车牌号码转化为数字信息完成自动车牌识别功能。模块由前端高清摄像机、照明补光设备、传感设备以及用于识别车牌号码的处理设备计算机,模块通过车牌定位算法、自动分割字符并识别字符将图像采集的信息转化为车辆实际牌号。当车辆靠近入口时,车辆检测器自动感测车辆的到达,并触发牌照识别机器捕获图像。然后将捕获的图像发送到数据处理服务器,并且安装在数据服务器上的车牌识别软件处理图像
(四)AGV智能停车。AGV使用MK60DN512ZVLQ10作为中央处理器,通过处理红外感应信号数据来计算行车路线,并通过网络通讯模块与远程监控客户端进行通讯。同时将采集到的有关的车辆运行信号信息发送到客户端。并且使用特定的设计客户程序为用户提供对自动引导车辆操作的实时监控。AGV 系统利用AGV 汽车的形状,汽车的基本机械结构以及陀螺仪空间坐标解决方案。其监测组成部分为,红外线光电传感器、激光检测光电传感器、电磁信号接收传感器,超声波避障传感器,车辆速度监测传感器以及无线充电电源模块,以及电机驱动器和电机模块设计,网络通信模块以及MK60 中央控制器等。基于Cortex-M7 的MK60 DN512 ZVLQ10 芯片被用作主处理器,以使系统在断电和重启后恢复正确的系统时间进行工作。按键来实现控制小车的启停。AGV小车设计了超声波障碍物监测避免碰撞传感器和运行速度传感器,主要测量障碍物和小车的距离以及它们的运行速度以防止相撞[4]。
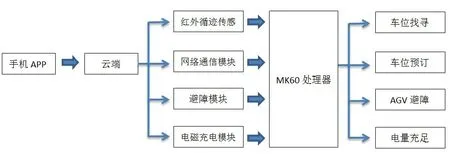
图3 MK60处理器处理逻辑
系统中的数据处理由MK60处理器完成如图3所示。网络通信模块实现与云端的通信,便于用户实时查询车位情况,使AGV停车更加自动化,智能化。
(五)超声波避障模块。四个超声波测距模块主要安装在AGV 推车前后[5],对称布置,以便在行驶过程中避开障碍物。当超声波模块发送和接收信号时,表明前方有障碍物,车辆将停止前进,并发出警报[6]。
三、结语
智能停车场相比于传统的停车场而言,有很大的创新与改革,顺应了时代的发展与要求。真正能做到,停车无忧,停车无患。车主无需再为找车位而烦恼,也无需再为怎样停车而忧虑,一个停车场全解决。智能停车场无需人工,自己拥有一套完善的系统体系,这样就大大的降低了其平时的人工成本,加上技术的成熟,设备的先进。日后的维护次数会很少,这样也随之减少了维修成本。再加上科技的不断进步,停车场的成本也会随之大大的降低,从而达到性价比之最。未来,城市智能停车场将越来越受欢迎,成为美丽的城市景观。
