车辆进出管理的实验室模拟
2019-07-11王玉清
王玉清
(延安大学物理与电子信息学院,陕西延安716000)
近年来,随着经济社会的发展,机动车辆数量持续快速增加,堵车现象已经成为司空见惯的事情[1-4],为了缓解这方面压力,实施有效的交通管理监控,多数单位的大门口都安装了车辆探测器。但是在车辆探测器实际探测时,当个别车辆经过时,由于车辆距离探测器较远,出现探测器无反应的情况,这时,车辆必须往后倒退,然后前进,当车辆重新靠近探测器时,才有可能识别。个别驾驶员不能理解,为什么要这样?到底是怎么回事?实际上,这是由于不懂车辆探测器的原理造成的。地球磁场在几公里范围内可视为均匀分布,当较大的铁磁物质如车辆穿过时会对周围磁场产生扰动,探测器便可根据此扰动探测车辆的运动状态[1-15]。这里,我们利用各向异性磁阻传感器、废旧的磁电式电流表在实验室模拟车辆的进出管理,普及车辆进出管理的知识。
1 模拟原理
各向异性磁阻传感器AMR由沉积在硅片上的坡莫合金薄膜形成电阻。沉积时外加磁场,形成易磁化轴方向。铁磁材料的电阻和电流与磁化方向的夹角有关,电流与磁化方向平行时电阻Rmax最大,电流与磁化方向垂直时电阻Rmin最小,电流与磁化方向成θ角时,电阻可表示为:
R=Rmin+(Rmax-Rmin)cos2θ。
在磁阻传感器中,为了消除温度等外界因素对输出的影响,由4个相同的磁阻元件构成惠斯通电桥,结构如图1所示。图1中,易磁化轴方向与电流方向的夹角为45°。理论分析与实践表明,采用45°偏置磁场,当沿与易磁化轴垂直的方向施加外磁场,且外磁场强度不太大时,电桥输出与外加磁场强度成线性关系。无外加磁场或外加磁场方向与易磁化轴方向平行时,磁化方向即易磁化轴方向,电桥的4个桥臂电阻阻值相同,输出为零。当在磁敏感方向施加如图1所示方向的磁场时,合成磁化方向将在易磁化方向的基础上逆时针旋转。结果使左上和右下桥臂电流与磁化方向夹角增大,电阻减小△R;右上与左下桥臂电流与磁化方向的夹角减小,电阻增大△R。通过对电桥的分析可知,此时输出电压可表示为:
U=Vb×△R/R。
式中Vb为电桥工作电压,R为桥臂电阻,△R/R为磁阻阻值的相对变化率,与外加磁场强度成正比,故AMR磁阻传感器输出电压与磁场强度成正比,可利用磁阻传感器输出电压的变化来探测电流表的运动状态,从而完成车辆进出的实验室模拟。
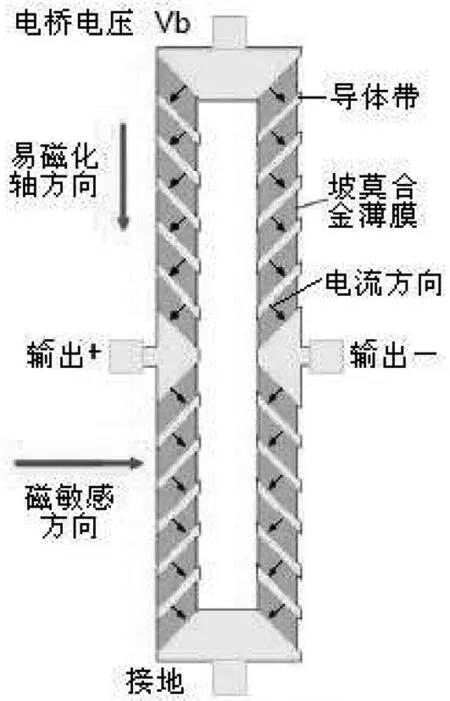
图1 磁阻电桥
商品磁阻传感器已制成集成电路,除图1所示的电源输入端和信号输出端外,还有复位/反向置位端和补偿端两对功能性输入端口,以确保磁阻传感器的正常工作。
2 模拟装置
模拟装置由四川世纪中科光电技术有限公司研制的ZKY-CC型各向异性磁阻传感器和磁场测量仪、废旧的磁电式电流表组成,如图2所示。
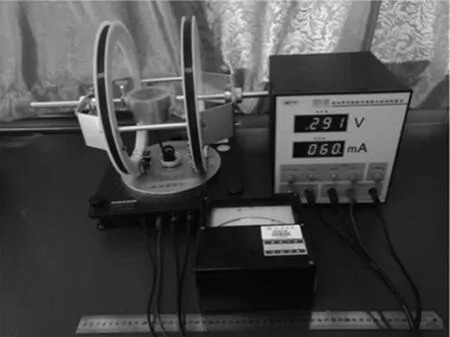
图2 模拟装置图
3 模拟方法
3.1 连接实验仪与电源,开机预热20 min。
3.2 将磁阻传感器位置调至亥姆霍兹线圈中心,传感器磁敏感方向与亥姆霍兹线圈轴线一致。
3.3 将K1、K2同时通电,调节亥姆霍兹线圈电流为零,按复位键,调节补偿电流,使传感器输出为零。调节亥姆霍兹线圈电流至300 mA,调节放大器校准旋钮,使输出电压为1.500 V。
3.4 将电流表沿与磁敏感方向平行、与磁敏感方向一致的x轴正方向移动,记录电流表距离磁阻传感器的位移x及相应输出电压U数据,利用数据作U-x曲线。
3.5 将电流表沿与磁敏感方向平行、与磁敏感方向相反的x轴负方向移动,记录电流表距离磁阻传感器的位移x′及相应输出电压U数据,利用数据作U-x′曲线。
3.6 将电流表沿与磁敏感方向垂直、与磁敏感方向在一个水平面内的y轴正方向移动,记录电流表距离磁阻传感器的位移y及相应输出电压U数据,利用数据作U-y曲线。
3.7 将电流表沿与磁敏感方向垂直、与磁敏感方向在一个水平面内y轴负方向移动,记录电流表距离磁阻传感器的位移y′及相应输出电压U数据,利用数据作U-y′曲线。
3.8 将电流表沿与x轴、y轴垂直的方向z轴正方向移动,记录电流表距离磁阻传感器的位移z及相应输出电压U数据,利用数据作U-z曲线。
3.9 将电流表沿与x轴、y轴垂直的方向z轴负方向移动,记录电流表距离磁阻传感器的位移z′及相应输出电压U数据,利用数据作U-z′曲线。
4 模拟数据与结果
4.1 电流表沿与磁敏感方向平行、与磁敏感方向一致的x轴正方向移动的实验数据,见表1。

表1 电流表沿x轴正向移动的实验数据
鉴于篇幅,此处及后文中电流表沿x轴负方向、y轴负方向、z轴负方向移动的实验数据不再另设表格列出。
利用表1数据作图3(a)。为了与正向对比,利用电流表沿x轴负方向移动的实验数据作图3(b)。
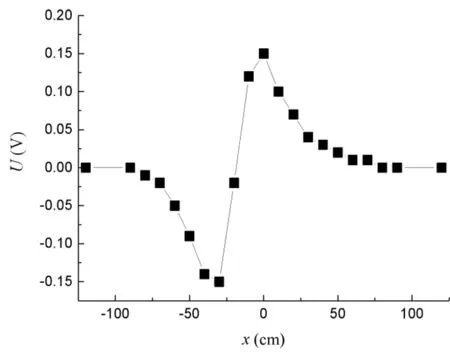
图3(a) 电流表沿x轴正向移动的曲线
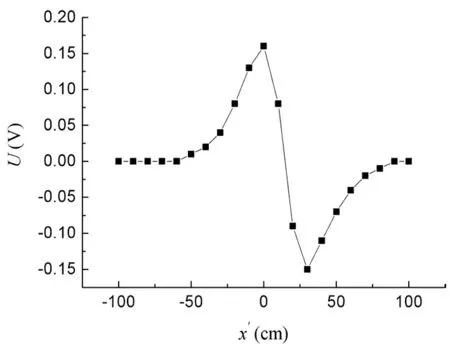
图3(b) 电流表沿x轴负向移动的曲线
从图3(a)中可以看出,当电流表沿传感器的x轴正方向移动时,如果电流表与传感器之间距离d较大(d>80 cm),小车的存在对传感器输出影响不大。当电流表靠近传感器(d<80 cm)时,传感器输出变化明显。传感器输出先是减小,在位移约为-30 cm处达到最小值,在无电流表干扰时的输出值基础上减小0.15 V;随后快速增大,在位移约为-20 cm处增大到无电流干扰时的输出水平后继续增大,一直增大到在位移约0 cm处达到最大值,此后又减小,并在距离d>80 cm时恢复到无小车干扰时的输出水平。
从图3(b)中可以看出,当电流表沿x轴负方向移动,如果电流表与传感器之间距离d较大(d>80 cm),电流表的存在对传感器输出影响不大。当电流表移动逐渐靠近传感器时,传感器输出先是减小,在位移约为30 cm处达到最小值,在无电流表干扰时的输出值基础上减小0.15 V;随后快速增大,在位移约为15 cm处增大到无电流干扰时的输出水平后继续增大,一直增大到在位移约0 cm处达到最大值,此后又减小,并在距离d>80 cm时恢复到无小车干扰时的输出水平。
结果表明,电流表沿与磁敏感方向平行、与磁敏感方向一致的x轴正、负方向移动时,传感器的输出变化规律不同。电流表只在距离传感器距离d<80 cm内,电流表的存在对传感器输出有影响。否则,电流表的存在对传感器输出无影响。
4.2 电流表沿与磁敏感方向垂直、与磁敏感方向在一个水平面内的y轴正方向移动的实验数据,见表2。
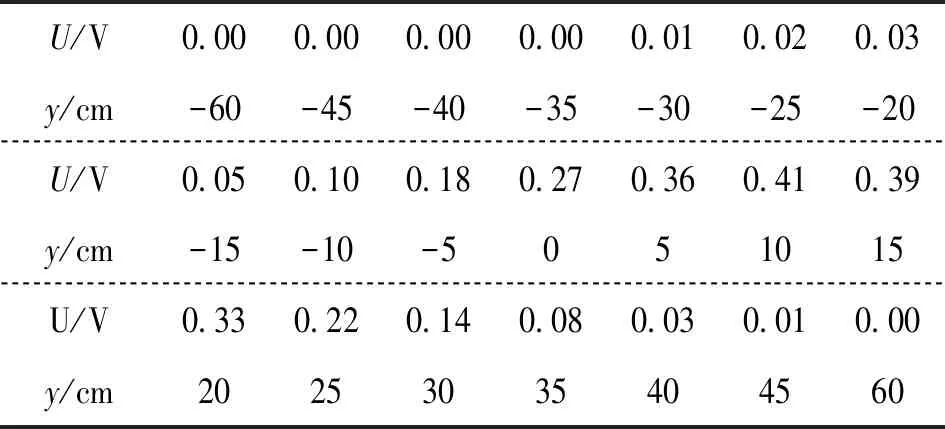
表2 电流表沿y轴正向的实验数据
利用表2数据作图4(a)。利用电流表沿y轴负向的实验数据作图4(b)。

图4(a) 电流表沿y轴正向移动的曲线
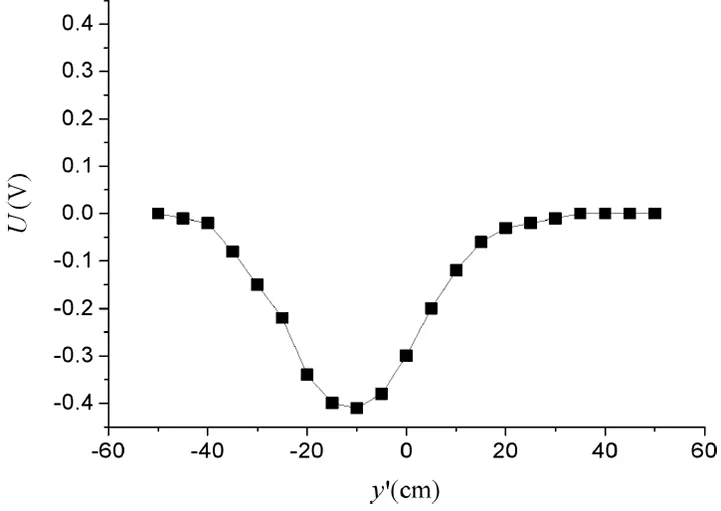
图4(b) 电流表沿y轴负向移动的曲线
从图4(a)中可以看出,电流表沿与磁敏感方向垂直、与磁敏感方向在一个水平面内的y轴正方向移动时,如果电流表与传感器之间距离d较大(d>35 cm),电流表的存在对传感器输出影响不大。当电流表靠近传感器,距离d<35 cm时,传感器输出变化明显。当电流表移动逐渐靠近传感器时,传感器y输出先是增大,在距离d约为10 cm处达到最大值,在无电流表干扰时的输出值基础上增大0.41 V;随后快速减小,并在距离d约为60 cm时恢复到无小车干扰时的输出水平。
从图4(b)中可以看出,当电流表沿y轴负方向移动,如果电流表与传感器之间距离d较大(d>35 cm),电流表的存在对传感器输出影响不大。当电流表移动逐渐靠近传感器时,传感器输出先是减小,在距离d约为10 cm处达到最小值,在无电流表干扰时的输出值基础上减小0.41 V;随后快速增大,在距离d约为35 cm时恢复到无小车干扰时的输出水平。
结果表明,电流表沿与磁敏感方向垂直、与磁敏感方向在一个水平面内的y轴正、负方向移动时,传感器的输出变化规律不同,电流表只在距离传感器d<35 cm内,电流表的存在对传感器输出有影响。否则,电流表的存在对传感器输出无影响。
4.3 电流表沿与x轴、y轴垂直的方向z轴正方向移动的实验数据,见表3。
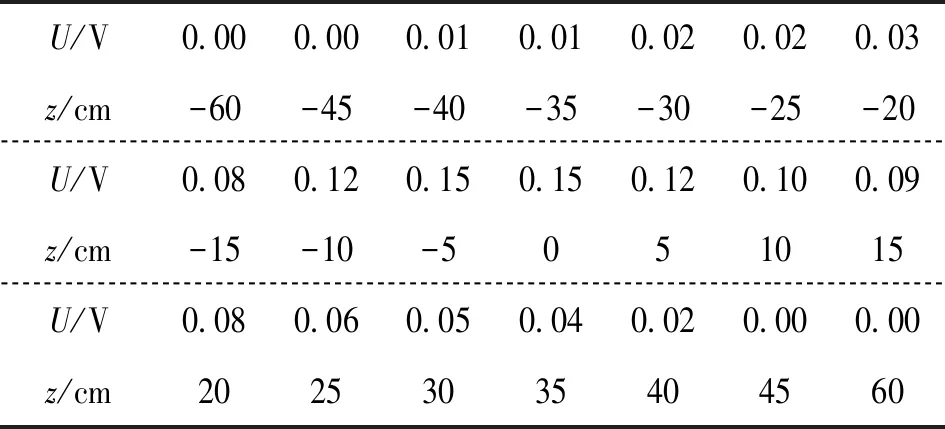
表3 电流表沿z轴正向的实验数据
利用表3数据作图5(a)。利用电流表沿z轴负向的实验数据作图5(b)。
从图5(a)中可以看出,电流表沿与x轴、y轴垂直的方向z轴正方向移动时,如果电流表与传感器之间距离d较大(d>40 cm),电流表的存在对传感器输出影响不大。当电流表移动逐渐靠近传感器时,传感器输出增大,在距离d约为0 cm处达到最大值,在无电流表干扰时的输出值基础上增大0.15 V;随后快速减小,并在距离d>45 cm时恢复到无小车干扰时的输出水平。
从图5(b)中可以看出,当电流表沿z轴负方向移动,如果电流表与传感器之间距离d较大(d>40 cm),电流表的存在对传感器输出影响不大。当电流表移动逐渐靠近传感器时,传感器输出减小,在位移约为0 cm处达到最小值,在无电流表干扰时的输出值基础上减小0.15 V;随后快速增大,在距离d约为40 cm时恢复到无小车干扰时的输出水平。
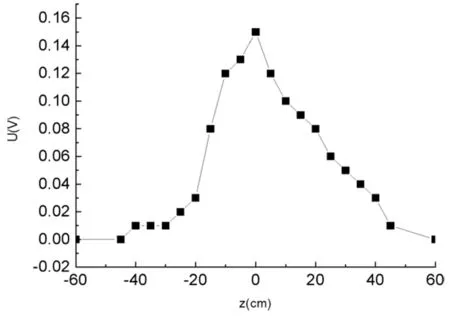
图5(a) 电流表沿z轴正向移动的曲线
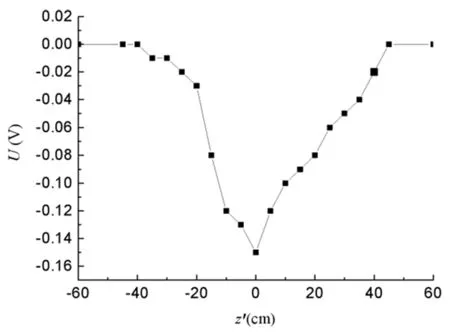
图5(b) 电流表沿z轴负向移动的曲线
结果表明,电流表沿与x轴、y轴、z轴正、负方向移动时,传感器的输出变化规律不同,电流表只在距离传感器一定范围内时,电流表的存在对传感器输出有影响。否则,电流表的存在对传感器输出无影响。
5 结论
从实验结果可以看出,电流表沿着不同的方向通过AMR传感器时,传感器输出变化规律不同。多次实验表明,电流表从不同方向通过传感器时均能正确识别。但是,电流表不管从哪个方向沿传感器移动,当距离超过一定的范围时,传感器都无反应。这就要求我们在车辆进出的地方安装传感器时,传感器安装的高低是有要求的。如果车辆距离传感器较远,车辆的存在对传感器输出无反应,车辆进出就不能识别。利用各向异性磁阻传感器、废旧的磁电式电流表,在实验室模拟车辆的进出管理切实可行,达到普及车辆进出管理的探测知识。
