基于继电器控制的直流电动机模型优化设计
2019-07-10曲祥君
李 青,曲祥君,张 旭
(遵义师范学院工学院,贵州遵义563006)
继电器属于电控器件,已广泛应用于各领域,如通讯、遥感、自动控制及工业制造等,是一种用小电流来控制大电流实现运作的“自动开关”,在电路中起着安全保护、自动调节和转换电路等作用[1]。继电器控制直流电动机分为控制电路和被控电路两部分,电动机的运行受到继电器控制电路和外界因素的影响,对此,从继电器工作原理出发,分析影响电动机运行的主要因素,利用测速传感器反馈信号,构建系统控制模型,启用MATLAB/Simulink仿真,结果表明:在阶跃扰动信号作用下,系统响应快,超调小,电动机速度能在预期界限内稳定运行,总体控制效果较好。
1 继电器控制直流电动机工作原理
如图1所示,电路包含两部份:电磁式继电器控制电路和电动机工作电路,控制电路中电磁式继电器由弹簧、磁铁、线圈、衔铁、触点簧片组成。当电流通过继电器线圈时,线圈铁芯中产生交变磁通,形成电磁感应,衔铁受电磁力吸引克服弹簧的拉力吸向铁芯,带动衔铁的动静触点吸合,工作电路形成闭合回路,电动机运转,当电流减小或线圈断电后,电磁转动力矩减小,衔铁所受的电磁吸力减小,在弹簧的拉力下返回,动静触点分离,工作电路断开,电机停止运行[2]。
由上述所知,继电器控制电路的性能和外界扰动直接影响电动机的运行状况,建立有效的电路模型和最优控制系统是保证电动机稳定运转的关键。
2系统等效电路模型的建立
由工作原理可知,电磁式继电器控制电路可等效为RL电路[3],对此建立如下电路模型(图2),模型中的扭矩Td一般是由外界因素如风力和库仑摩擦力引起,根据基尔霍夫电压定理和电机扭矩计算原理,建立系统微分方程:
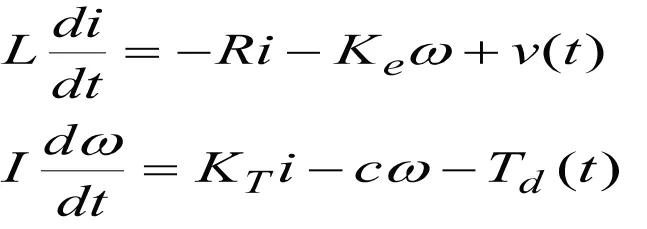
对应符号意义如下:
Ke:反电动势常数,KT:转矩常数,I:惯性扭矩,Td:扰动扭矩。
由微分方程可知,该模型属于状态—变量模型[4],令,将方程改写为矢量—矩阵方程形式,即:

对于系统模型,选定参数值:Ke=0.045V.s/rad、C=0.01N.m.s/rad、R=0.7、L=0.0025H、KT=0.05N.m/A、I=5.6*10-5kg.m2,得出矢量矩阵 A、B 如下:



图2 等效电路模型
3 系统MATLAB控制模型构建
设扰动扭矩Td(t)是一个阶跃扰动函数,开始时间t=0.04s,并从0增加到3.5N.m,电动机的额定电流为160A,要使控制系统能更好地控制电动机速度,需将电机速度反馈给继电器,形成闭环控制系统[5],提高控制精度,对此,选用速度传感器将马达速度转化为电信号传递给继电器。根据继电器控制逻辑[6],设外施电压v(t)在0到110V之间转换,确保电动机速度保持在200rad/s到350rad/s之间,从而构建MATLAB/Simulink系统控制模型(图 3)[7]。

图3 MATLAB/Simulink系统控制模型
4 MATLAB控制模型仿真
为了检验在阶跃扰动下系统模型的控制效果,分别将电动机速度和电流i作为输出进行检验。
仿真结果表明,在设定条件下,系统启动在扰动扭矩作用前,电动机转动因受粘滞性阻尼和反向电动势的作用[8],转速会进行振荡,但总体速度维持在200rad/s~350rad/s之间,符合预期设定界限。当扰动扭矩开始作用时,速度下降到低于200rad/s,继电器控制电路将外施电压v(t)转换到110V,电机扭矩在对抗扰动扭矩的情况下,经过大约0.018s将速度维持在300rad/s左右,符合预期设定值。总体来讲,电机转速在设计的继电器控制系统作用下,振荡时间较短,超调小,响应快,最终速度稳定在300rad/s的预期界限,符合设计最优要求。

图4 电动机速度 仿真图形

图5 电动机工作电流i仿真图形
2)将电流i作为输出进行检验。令C=[0,1],D=[0,0],其他参数不变,再次对图3的控制模型进行仿真,得出仿真图形(图5)。仿真结果表明,在假定的阶跃扰动扭矩 Td(t)=3.5N.m,外施电压为110v情况下,工作电路中电动机的电流受继电器控制,其振荡很小,响应快,经过大约0.05s时间电流维持在150A左右,该电流小于电动机的额定电流160A,符号电动机的工作要求。
5 结论
继电器作为电控器件,在电路中起安全保护,自动调节和转换电路的作用,其应用较为广泛。利用继电器控制的直流电动机模型,通过构建等效电路和系统控制模型分析,利用MATLAB仿真,结果表明,系统在扰动扭矩Td(t)作用下,响应快,超调小,振荡时间短,经过较短时间进入预期稳定状态,其抗干扰能力较强,实现了对该模型的优化控制设计,适合在直流电动机运行中推广。
