基于北斗定位和视觉识别的机器人设计
2019-07-09曲皇屹
曲皇屹

摘 要:近年来,随着进步和社会科学技术需求的进步,机器人技术迅速普及,农业的智能化将会是农业机械发展的首要目标,也是实现国家智能化的必经之路。基于此我们设计了一款基于北斗定位技术和机器视觉识别技术的机器人,北斗系统将帮助机器人产生定位和轨迹。
关键词:北斗定位;视觉识别;机器人设计
1 研究背景
目前,Stephen Nuske等[1]设计了一种可以通过行走预测葡萄产量的装置。Yaguchi H等[2]设计了一种简易的轨道式番茄采摘机器人样机。郭素娜等[3]基于GPS设计了一款葡萄采摘机器人。刘碧贞等[4]设计了一款基于北斗定位的谷物收割机,可以对收割机行走路线进行测绘,以及数据的传输及调度等。
2 北斗定位过程及原理
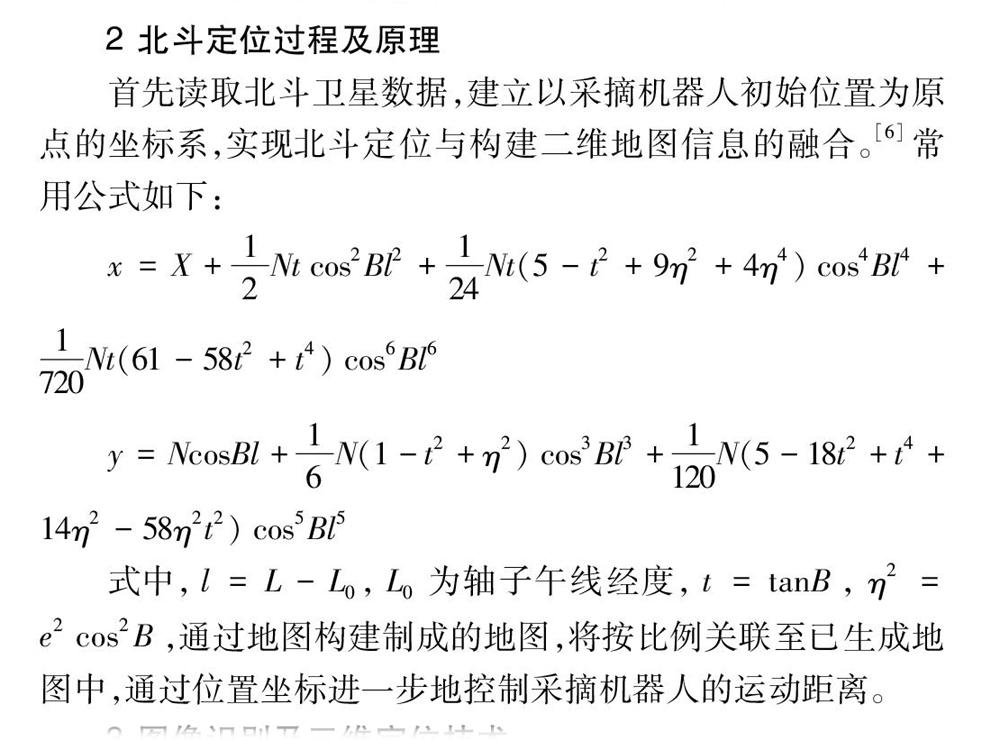
首先读取北斗卫星数据,建立以采摘机器人初始位置为原点的坐标系,实现北斗定位与构建二维地图信息的融合。[6]常用公式如下:
3 图像识别及三维定位技术
图像识别:一个目标物体中总存在着其独特的像素点,这些点我们可以认为就是这个目标物体的特征,成为特征点。而我们可以用一些算法将目标的目标特性提取出来从而实现目标识别。本产品采用的是核滤波算法和FAST算法来提取目标特性,核滤波算法可以对目标进行卷积从而对其目标进行加权平均操作,使目标和周围环境有更高的对比度。将提取到的目标特性和预留特性相对比便可实现识别物体的功能。单目立体视觉三维定位是由单目机器视觉和TOF光学测距模块共同组成。
单目机器视觉:通过FAST算法进行特征提取,将提取到的特征点与预留的目标特征点相对比从而识别目标物体,识别完成后会自动追踪追踪视野内最大的目标物体,然后操纵机械臂将带动单目视觉处理器将目标移至视野中间。
TOF光学测距模块:TOF光学测距模块通过光发射回芯片的时间来计算距离,TOF测距的视野非常窄,相比于红外光测距更精确。机械臂将目标移至中间后会启动测距將机械臂与目标之间的距离计算出来,从而达到对目标的三维测量。
4 智能避障系统
当机器人采摘果实时遇到障碍物,因为信息是时刻变化的,所以需要把全局轨迹规划和局部轨迹规划相结合;超声波传感器监测机器人前部的障碍物,同时考虑概率障碍。同时根据速度判断是否会发生碰撞,以期调用相关算法对路径进行规划,达到自动避开前方障碍物的目的。
超声波屏障核心分流模块是一个超声波模块启动,如图20所示,它通过从超声波模块同时传输超声波发送器在某个方向上,当遇到障碍物时,微控制器上的软件程序定时器的启动时间停止,通过计算屏障发送器之间的距离来获取。
系统结构图如下图所示。这款STM32F103设计微控制器作为控制,实现直流电机控制,通过电机驱动模块调节连接,调节占空比,改变直流电机转速。对于智能跟踪和屏障避免功能,加上前置红外跟踪模块的前端。
系统结构工作图
5 工作过程
机器人搭载Openmv视觉识别系统,可以对图像进行识别,当机器人识别到果实后会自动追踪,当果实进入采摘范围内,机器人自动停止,同时机械臂配合机械爪对果实进行采摘,将采摘后的部分果实送到车后拖带的收集箱内,循环往复,北斗定位实时监测机器人位置。
参考文献:
[1]Nuske,Stephen,Achar,Supreeth,Bates,Terry,Narasimhan,Srinivasa,Singh,Sanjiv.Yield estimation in vineyards by visual grape detection[P].Intelligent Robots and Systems(IROS),2011 IEEE/RSJ International Conference on,2011.
[2]Yaguchi H,Nagahama K,Hasegawa T,et al.Development of an autonomous tomato harvesting robot with rotational plucking gripper[C].IEEE/RSJ International Conference on Intelligent Robots & Systems.IEEE,2016.
[3]郭素娜,张丽,刘志刚.一种高精度自主导航定位的葡萄采摘机器人设计[J].农机化研究,2016,38(07):20-24.
[4]刘碧贞,黄华,祝诗平,向必万.基于北斗/GPS的谷物收割机作业综合管理系统[J].农业工程学报,2015,31(10):204-210.
