基于CAN唤醒的电子驻车控制器设计
2019-07-09刘强周羽郭文欣
刘强 周羽 郭文欣


摘 要:电子驻车控制器GCU采用基于CAN唤醒功能的收发芯片进行低功耗方案设计,硬件方案包含单片机模块、电机驱动模块、CAN通讯模块、电源转换模块。同时,介绍分析了CAN芯片休眠及唤醒机制和控制策略。
关键词:CAN休眠与唤醒;驻车控制器;低功耗
1 引言
随着能源危机及环境污染等问题,20世纪以来日本及欧洲各大厂商(丰田、大众、宝马等)陆续推出混合动力汽车HEV、纯电动车EV及燃料电池汽车FCV车型。鉴于全球汽车行业发展情况,我国大力主推纯电动汽车EV车型。由于目前电池技术限制,纯电动汽车续航里程普遍较低,所以车辆使用过程中需要尽可能降低电能消耗,以提高整车单次充电使用时间。
纯电动汽车电控系统的休眠模式,是指汽车在行驶途中或者熄火一段时间以后,部分电控单元或整车全部电控单元进入低功耗状态。电子驻车控制器GCU是纯电动汽车主动安全控制单元之一,用于驻车时控制驻车电机作用于锁止机构将车轮抱死,保证停车的安全可靠。应用于纯电动汽车的电子驻车控制器,与减速器为一个整体,安装在发动机舱,是一个独立的控制机构。该控制器在非驻车阶段不参与整车行驶通讯控制,所以有必要使其进入休眠模式,降低整车能耗。
2 总体方案设计
电子驻车控制器通过接收整车控制系统VCU指令,进行驱动控制驻车电机正转或反转,通过模拟电路采集位置传感器信号,从而判断电机执行机构是否行进到正确位置。该控制器具备档位信號监控及处理、驻车系统监控、过载保护功能、CAN网络通讯、故障诊断等功能,采用高性能的处理器和高稳定性的汽车级电子元器件,配合成熟稳定的电路设计和丰富全面的电路保护功能,结合坚固防水的金属外壳结构,保证驻车控制器能够在各种恶劣环境(包括恶劣的电磁干扰环境和严酷的气候等外界环境)中稳定运行。
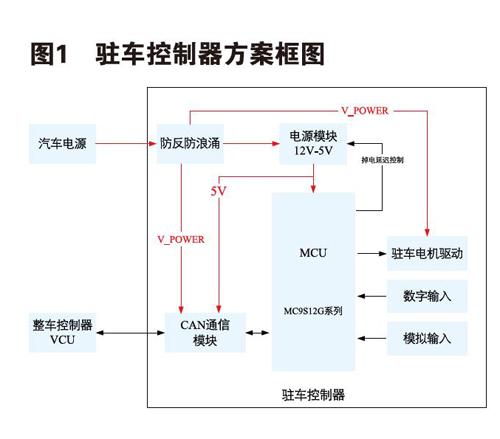
该控制器方案设计框图如图1所示,主要由电源模块、MCU单片机、电机驱动、模拟输入、数字输出及CAN通信模块。此处CAN通信模块具有特定CAN帧唤醒功能和MCU控制休眠待机功能。
3 硬件电路设计
3.1 MCU单片机控制模块
MCU是电子驻车控制器电子控制系统的核心,它负责数据采集、处理以及所有的逻辑运算,并直接影响到控制器电路运行的可靠性、成本控制以及控制器的尺寸。本系统采用Freescale公司生产的专业用于汽车级的16位 S12G系列芯片,它具有较高的时钟频率25Mhz,集成了PWM驱动及AD采集模块,兼容CAN2.0B协议的CAN控制模块等。
3.2 电机驱动模块
控制器通过VNH5019全桥电机驱动专用芯片驱动驻车直流有刷电机。该芯片内部集成了4个NMOS管,具备堵转电流检测及过压过热保护等功能,具有成本低、高可靠性等优点。MCU通过简单的IO口及 PWM 输出对VNH5019进行操作即可实现对电机的的正反转及转速控制。该芯片可检测电机工作电流,通过CS管脚输出,MCU利用分压电路采集电压信号即可判断电机工作电流大小。
3.3 电源转换模块
电压转换模块主要功能是把车载电源12V电压转换为板内主5V电压,为单片机及CAN芯片提供电源。电源芯片可采用TI公司TPS7A6150,具备低电压差线性转换能力,具有电源使能ON/OFF管脚(高电平有效),控制芯片是否输出5V电源。
电路中IGN点火信号输入,由CAN收发器INH管脚控制导通情况。电源芯片EN使能管脚控制来源有:IGN点火信号、CAN芯片唤醒后输出信号和单片机GPIO输出信号。电源芯片工作状态如表1所示:
3.4 CAN通信模块
3.4.1 CAN收发模块介绍
控制器局域网(Controller Area Network,CAN)为串行通信协议,能有效支持具有很高安全级的分布实时控制。CAN的应用范围很广,从高速的网络到低价位的多路配线都可以使用CAN。在汽车电子行业里,使用CAN连接发动机控制单元、传感器、防滑系统等,其传输速度可达1 Mbit/s。驻车控制器系统需要通过CAN总线与整车控制器进行通信。MCU单片机内集成了CAN控制器,系统选择NXP公司TJA1043作为CAN收发器,具体的CAN总线接口电路如图所示。作为差分信号,使用共模电感大幅减小共模干扰,同时配合电容滤波和TVS的浪涌泄放,保证了CAN通信的稳定性。其中,CAN收发器正常工作时INH管脚输出高电平,休眠时输出低电平。
3.4.2 CAN收发模块工作模式
CAN芯片TJA1043具有五种工作模式,正常模式Normal mode、待机模式Standby mode、进入休眠模式Go-to-Sleep mode、休眠模式Sleep mode和监听模式Listen-only mode。其中第一档省电为休眠模式功率消耗最低,INH管脚置于悬空状态,电源芯片处于休眠或掉电过程;第二档省电为待机模式,INH管脚置于高电平,电源芯片仍处于工作状态。芯片管脚、标志位及状态切换说明见表2。
3.4.3 工作机制
休眠机制:驻车控制器一段时间接收不到特定CAN帧,控制器MCU通过I/O口控制TJA1043芯片管脚STB_N=L和EN=H,经过最小保持时间th后芯片进入休眠模式,INH管脚置低。电源芯片使能管脚MCU控制延时两秒后置低,停止输出主5V电源,整个控制器断电不再工作。TJA1043进入低功耗状态,仅由汽车电池对管脚VBAT提供基础工作电源。
唤醒机制:驻车控制器收到特定CAN帧(满足标准ISO11898-5: 2007要求),TJA1043短时唤醒,INH管脚置高。电源芯片使能管脚置高,开始输出主5V电源,MCU进入工作状态后立即控制TJA1043芯片管脚STB_N=H和EN=H,使TJA1043从休眠模式进入待机模式后开始正常工作。
4 控制策略
驻车控制器MCU软件开发采用分层架构和协调开发模式,软件分为底层程序(含芯片驱动、CANbootloader、标定功能等)和应用层程序(含控制逻辑、故障诊断等)。其中重点介绍驻车控制器整个休眠与唤醒控制策略流程图,如图5所示。
5 结语
新能源汽车由于整车电量限制,所以电控零部件必须考虑低功耗模式,延长汽车有效使用里程。驻车控制单元采用CAN唤醒收发芯片和带ON/OFF控制的电源芯片进行设计,非工作时段整个单元可进入低功耗模式;工作时段先唤醒CAN芯片,然后激活整个单元进入正常工作模式。
参考文献:
[1]马建辉.汽车CAN节点的低功耗设计及实现[J].电子产品世界.2018(3).
[2]涂金林.电动汽车CAN网络系统的设计与实现[D].电子科技大学.2015.
