多摄像机下模糊图像细节特征目标快速检测研究
2019-07-08胡明合
胡明合

摘 要: 人工检测方法只收集了模糊目标相关信息以及模糊背景分析结果,导致图像细节特征检测效果较差。为了解决该问题,提出多摄像机下模糊图像细节特征目标快速检测方法。根据多摄像机下模糊图像监控工作流程,对现有摄像机资源进行分配,并对统一目标进行识别与检测。提取模糊图像细节特征,衡量边缘图像相似情况,通过搜索目标图像与待匹配图像之间的匹配度量,计算倒角距离最小值。使用矩形窗口定义局部边缘特征,并对其进行采集与处理,由此生成视野分界线,在多摄像机固定情况下对目标进行检测。通过实验对比结果可知,该方法比人工方法检测效率要高,最大相差70%,为摄像机准确检测出模糊图像特征提供支持。
关键词: 模糊目标识别; 多摄像机摄影; 细节特征提取; 快速检测; 相似度衡量; 图像匹配
中图分类号: TN911.73?34; TP391 文献标识码: A 文章编号: 1004?373X(2019)13?0076?05
Target fast detection according to detail features of blurred
images taken by multiple cameras
HU Minghe
(College of Computer Science and Technology, Shangqiu University, Shangqiu 476000, China)
Abstract: The manual detection method only collects the relevant information of blurred objects and analysis results of blurred background, which leads to a poor detection effect of image detail features. Therefore, the target fast detection according to detail features of blurred images taken by multiple cameras is studied. According to the blurred image monitoring workflow of multi?camera photography, the existing camera resources are allocated, and the unified target is identified and detected. The detail features of blurred images are extracted to measure the similarity of target edges in image. The matching measurement between target image and image under matching is searched to calculate the minimum distance of chamfer. The local edge features are defined by means of rectangular window, captured and processed to generate the visual field demarcation line. After that, the target is detected while multiple cameras are fixed. The experimental results show that the detection effect of the proposed method is 70% higher than that of manual method, and the method provides the support for the camera to detect the features of blurred image accurately.
Keywords: blurred target identification; multi?camera photography; detail feature extraction; fast detection; similarity measurement; image matching
0 引 言
在监控系统中,需要摄像机俯仰运动和平视运动来扩大监控范围,随着运动目标的快速移动进行主动跟踪,因此研究多摄像机下模糊目标检测具有必要性。智能监控系统一般采用PC主机作为图像处理平台,以图像采集器为主要处理前端,由此可构成一个完整的、集视频图像处理为一体的智能分析模式。多摄像机视频监控系统的出现,有效拓展了传统单一视频监控范围,也极大地开阔了视频监控系统应用领域。目前,智能视频监控系统不仅应用在安全领域,也应用在许多非安全领域,其广阔的应用前景推动了智能视频监控技术图像特征检测的快速发展,为模糊目标快速检测提供支持手段[1]。
针对传统目标检测方法只收集了模糊目标相关信息以及模糊背景分析结果,并将此转交给人工进行处理,通过人工处理而获取的检测结果误差较大,基于此,本文提出基于局部边缘细节特征快速目标检测[2]。在多摄像机智能视觉监控研究方向中,提高视频监控系统的智能分析精准度,改善传统检测误差大的缺陷,在保持良好监控性能的前提下,快速检测出模糊图像的细节特征。
1 多摄像机下运动图像监控流程
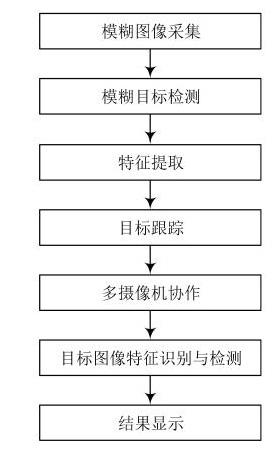
多摄像机监控是以图像处理器为前端,构成一个集图像分析、处理与细节检测为一体的智能系统。该系统由集中式结构和分布式结构共同组成,在集中式结构中,各个摄像机采集到的图像数据将集中传送到中心服务器之中,并由该服务器进行跟踪与检测[3]。因此,需对多摄像机下模糊图像监控工作流程进行研究。多摄像机下模糊图像监控工作流程如图1所示。
图1 多摄像机下模糊图像监控工作流程示意图
由图1可知,该摄像机视频监控系统可实现模糊图像采集、目标分类与跟踪、多摄像机间相互协作。由各个摄像机前端对模糊场景进行图像采集,获取多个摄像机可监视范围内场景,并对视频图像进行分帧[4]。利用图像某种特征,将目标图像从当前视频图像中分离出来,并提取有关细节特征,供后续处理[5]。通过分析目标图像细节特征进行目标检测,使模糊前景与背景相互分离,获取图像运动区域。多摄像机间的相互协作可对现有摄像机资源进行分配,并对统一目标进行识别与检测[6]。
2 图像细节特征目标检测研究
多摄像机检测过程中,需先对单个摄像机输入视频序列进行处理,不同摄像机通过目标检测算法可获取摄像机中的图像细节特征,为后续目标匹配提供数据。针对多摄像机之间的信息融合,需通过不同匹配准则,对不同摄像机中的图像进行匹配,识别相同目标,对所有监控信息进行持续跟踪,实现对模糊图像细节特征快速检测[7]。
2.1 图像细节特征目标提取过程分析
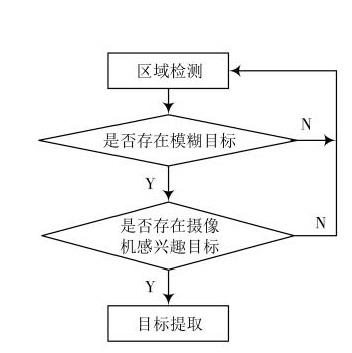
模糊图像细节特征快速检测是根据模糊图像信息将目标从模糊场景中提取出来的,是目标跟踪、识别、分类与检测等一系列后续处理的基础。依据目标模糊信息,即图像与背景差异在时间轴上的变化,可检测出图像中的模糊区域[8]。模糊图像细节特征提取过程如图2所示。
图2 模糊图像细节特征提取过程
由图2可知,多摄像机情况下,对感兴趣模糊图像的前景与背景进行区分,根据图像序列变化不同,图像检测通常可分为两种,一种是静态背景检测,另一种是动态背景检测[9]。充分考虑图像局部边缘分界线,快速提取模糊图像细节特征。
2.2 基于局部边缘细节特征快速目标检测
2.2.1 倒角匹配度量
倒角距离用来衡量两个边缘图像的相似情况,目标图像与待匹配图像之间的匹配是通过搜索它们之间的倒角距离最小值来实现的,主要步骤如下:
1) 计算待匹配图像倒角距离。
2) 将模板叠加在距离图像上,模板与待匹配图像的倒角距离计算公式为:
式中:[m]表示目标图像边缘数量;[dn]表示目标叠加处的距离值。
3) 将模板图像在距离图上平移,获取模板图像在待匹配图像上的倒角距离值,倒角距离值最小的位置向量即为最佳匹配点。在多摄像机应用条件下,通过判断最佳匹配点的值是否小于设定阈值来实现图像匹配[10]。
2.2.2 基于倒角距离局部边缘特征采集与处理
使用矩形窗口定义局部边缘特征,即为[f1=a,b,c,d],每个局部边缘[f]由2个模糊位置参数[a,b]和2个模糊尺度参数[c,d]表示。其中,[c,d]分别表示矩形窗口的宽和高。定义在图像上的倒角距离局部边缘特征[f2]的计算公式如下:
图3 积分图像值
图3中阴影部分所有像素值之和即为积分图像值。一旦建立了积分圖像,那么任何参数局部边缘特征值只需通过查表和简单计算就可获取。
采用机器学习法构建目标图像,其局部边缘特征的参数可通过机器学习来确定,不同取值组成将生成图像模型局部边缘特征。局部边缘特征处理示意图如图4所示。
图4 局部边缘特征处理示意图
由图4可知,为了减少备选特征数目,应限定边缘片段长与宽之比,获取备选边缘片段。
2.2.3 视野分界线生成
根据采集到的局部边缘特征和投影不变量特征,生成视野分界线,具体步骤如图5所示。
图5 视野分界线生成流程示意图
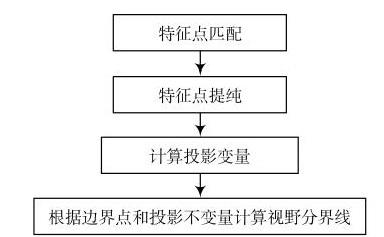
具体生成流程如下所示:
1) 从积分图像值中提取有重叠区域的背景图像特征点,并进行初步匹配;
2) 去除误匹配点;
3) 选择6对正确匹配点,使用各个点坐标计算投影变量;
4) 根据背景图像边界点获取图像模糊重叠区域面积。
2.2.4 基于视野分界线目标检测算法
在多摄像机固定情况下,通过上述步骤生成视野分界线之后,该分界线就不会发生变化,为此,基于视野分界线目标匹配算法主要研究思路如下所示:
1) 判断目标图像是否进入到两个摄像机之间重叠区域。如果摄像机[T1]中检测到模糊目标图像A时,需记录目标A的坐标位置[(x2,y2)]。假设摄像机[T2]在摄像机[T1]中的视野分界線可表示为[l21:Ax+By+c=0],那么模糊图像在摄像机[T2]视野范围内可见性为:
[E=Ax1+By1+c>0,图像在T2视野内可见=0,图像在视野分界线上<0,图像在T2视野内不可见] (4)
由式(4)判断出目标A在摄像机[T2]中可见,则说明该目标已经在这两个摄像机视野范围内。
2) 当判断目标图像到两个摄像机视野重叠区域时,需先提取其在摄像机[T1]中的位置[(x1,y1)],使用投影变量计算其在摄像机[T2]中的位置[(xn,yn)];检测另一个摄像机[T2]中出现的重叠区域内所有细节特征,利用该特征计算目标位置[(xn,yn)]到投影点的距离,具体计算公式如下:
由式(5)可得到目标位置到投影点的距离,如果该距离小于既定阈值,并且距离最短,即为检测获取的模糊细节特征。
3 实 验
针对多摄像机下模糊图像细节特征目标快速检测,采用局部边缘特征目标检测方法可改善传统人工方法检测效果差的问题,为了证实这一点,进行实验验证。
3.1 实验场景设置
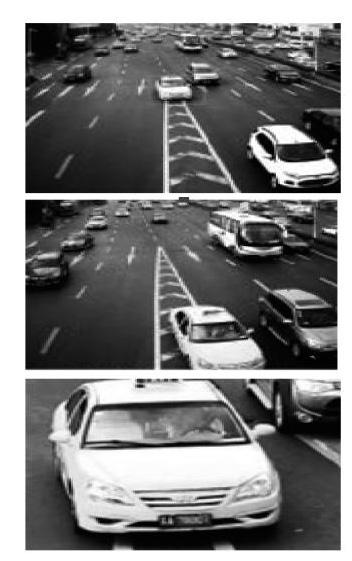
在不同场景中,对目标图像放大和缩小两种实际情况进行跟踪,为实验提供具体场景。在实验场景中,选定目标图像为监控视频中的图像,由于多个摄像机是固定的,目标相对摄像机是由远及近或由近及远的变化,使得目标在图像上的成像越来越小或越来越大,如图6所示。
图6 模糊图像缩小或放大情况下跟踪结果
3.2 实验结果与分析
在跟踪过程中,保证目标图像方框尺度不变,在放大10%,缩小10%的情况下,模糊图像相似度比较如图7所示。
图7 图像缩小或放大情况下相似度比较

由图7可知,最佳相似度折线在跟踪过程中选择目标缩小情况较多,也就是当前图像变化趋势是由大到小变化的,与实际处理情况一致。
根据上述模糊图像缩小或放大情况下相似度对比结果,分别将传统人工检测方法和细节特征目标检测方法的检测效率进行对比分析,结果如图8所示。由图8可得两种方法的检测效率比较如表1所示。
根据上述实验内容,可得出如下实验结论:
1) 当时间为5 min,10 min,15 min,20 min,25 min,30 min,35 min时,采用传统人工方法的A种特征检测效率比多摄像机目标检测方法的A种特征检测效率低45%,27%,44%,38%,61%,43%,57%;
2) 当时间为5 min,10 min,15 min,20 min,25 min,30 min,35 min时,采用传统人工方法的B种特征检测效率比多摄像机目标检测方法的B种特征检测效率低50%,48%,40%,40%,70%,53%,55%。
图8 两种方法目标检测对比结果
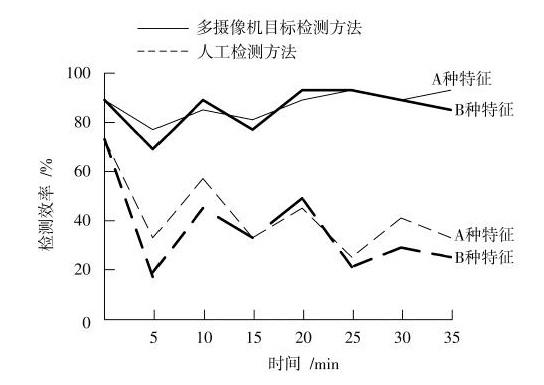
表1 两种方法检测效率比较
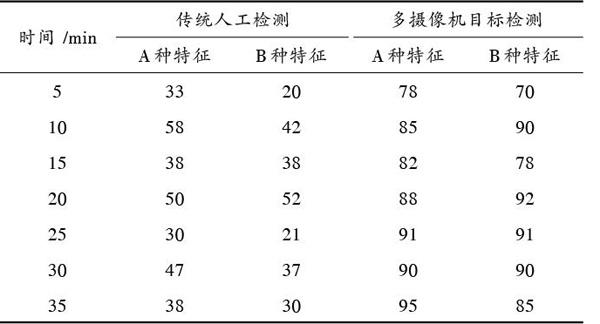
因此,采用多摄像机目标检测方法比传统人工检测方法的检测效果要好。采用多摄像机下模糊图像细节特征目标快速检测方法可改善传统人工方法检测效率低的问题。
4 结 语
由于单个摄像机视野有限,因此大范围场景就要使用多个摄像机进行监控,本文充分考虑多摄像机目标匹配广阔的应用前景,研究多摄像机目标检测方法。采用局部边缘特征目标检测方法可改善传统人工方法检测效率低的问题。通过实验结果可知,该方法最高检测效率为92%,实现了特征点之间的快速匹配。
本文虽然对于视频监控中的目标检测问题进行了一定研究,但是受到时间以及实验条件的限制,很多检测过程还不够深入,仍存在许多问题需要研究。因此,在以后的工作中,需对目标背景和基于视野分界线目标匹配进行分析,从而可以更好地实现监控系统的实时性。
参考文献
[1] 李保华.基于ARM?Linux机器视觉的图像特征点快速检测方法[J].微电子学与计算机,2017,34(10):115?118.
LI Baohua. The method based on ARM?Linux machine vision for rapid detection of image feature points [J]. Microelectronics & computer, 2017, 34(10): 115?118.
[2] 苏昂,张跃强,杨夏,等.航拍图像车辆检测中的圆形滤波器HOG特征快速计算[J].国防科技大学学报,2017,39(1):137?141.
SU Ang, ZHANG Yueqiang, YANG Xia, et al. Fast circle filter HOG for car detection from aerial images [J]. Journal of National University of Defense Technology, 2017, 39(1): 137?141.
[3] 陶卫平.低分辨率图像目标特征实时增强方法仿真[J].计算机仿真,2017,34(10):208?212.
TAO Weiping. Simulation of low?resolution image target feature real?time enhancement method [J]. Computer simulation, 2017, 34(10): 208?212.
[4] 李文娟,赵和平,庞波.基于频谱分布量化分析的星载人工目标快速检测方法[J].现代电子技术,2017,40(20):139?142.
LI Wenjuan, ZHAO Heping, PANG Bo. Method of satellite?borne man?made target fast detection based on quantitative analysis of spectrum distribution [J]. Modern electronics technique, 2017, 40(20): 139?142.
[5] 熊伟,徐永力,崔亚奇,等.高分辨率合成孔径雷达图像舰船目标几何特征提取方法[J].光子学报,2018,47(1):49?58.
XIONG Wei, XU Yongli, CUI Yaqi, et al. Geometric feature extraction of ship in high?resolution synthetic aperture radar images [J]. Acta photonica sinica, 2018, 47(1): 49?58.
[6] 刘峰,沈同圣,郭少军,等.基于特征级融合的多波段舰船目标识别方法[J].光谱学与光谱分析,2017,37(6):1934?1940.
LIU Feng, SHEN Tongsheng, GUO Shaojun, et al. Multi?spectral ship target recognition based on feature level fusion [J]. Spectroscopy and spectral analysis, 2017, 37(6): 1934?1940.
[7] 杜馨瑜,戴鹏,李颖,等.基于深度学习的铁道塞钉自动检测算法[J].中国铁道科学,2017,38(3):89?96.
DU Xinyu, DAI Peng, LI Ying, et al. Automatic detection algorithm for rail plug based on deep learning [J]. China railway science, 2017, 38(3): 89?96.
[8] 黄伟,严小乐,沈秋,等.二值化特征在快速舰船目标预选中的应用[J].光学技术,2017,43(5):445?449.
HUANG Wei, YAN Xiaole, SHEN Qiu, et al. Improved binarized normed gradients for fast ship target pre?detection [J]. Optical technique, 2017, 43(5): 445?449.
[9] 吴喆,曾接贤,高琪琪.显著图和多特征结合的遥感图像飞机目标识别[J].中国图象图形学报,2017,22(4):532?541.
WU Zhe, ZENG Jiexian, GAO Qiqi. Aircraft target recognition in remote sensing images based on saliency images and multi?feature combination [J]. Journal of image and graphics, 2017, 22(4): 532?541.
[10] 曾庆化,潘鹏举,刘建业,等.惯性信息辅助的大视角目标快速精确定位[J].航空学报,2017,38(8):188?200.
ZENG Qinghua, PAN Pengju, LIU Jianye, et al. Fast and accurate target positioning with large viewpoint based on inertial navigation system information [J]. Acta aeronautica et astronautica sinica, 2017, 38(8): 188?200.
