徕卡TM50三角高程测量替代二等水准测量的可行性研究
2019-07-06浙江省第一测绘院陈咪霞
□ 浙江省第一测绘院 陈咪霞
水准测量是一种传统的高程测量方法,精度较高,在理论研究、数据处理等方面也都趋于完善,在实际操作等方面已经形成了完善的操作规范。但是在地形复杂及坡度较大区域进行水准测量时,因测站增多,则精度降低、外业工作量和测量成本增大、施测速度较慢。
三角高程测量是高程测量的基本方法之一,简单、灵活、受地形限制较小,但是由于受到仪器精度、地球曲率、大气折光等因素的限制,一直没有得到突破性的提高,在很多时候只能应用于低等级的水准测量中。
近年来,随着测绘技术的发展,测量仪器精度的提高,尤其是高精度测量机器人的出现,给三角高程测量精度的提高带来了新的突破。
本单位在对某市CORS基准站进行二等水准观测时发现,由于CORS基准站布设位置都是在较高的屋顶上,使用传统的的精密水准连测方法传递高程时设站较困难,且需要工作人员爬到屋顶上进行设站、立尺,比较危险,所以开展了高精度测量机器人TM50进行三角高程中间观测法代替二等水准测量的研究和实践。
一、测量机器人三角高程测量方法和原理
三角高程测量是利用测站点观测照准点,得到垂直角和斜距,计算照准点和测站点之间的高差。目前在工程建设施工中常见的方法有单向观测法、中间观测法、对向观测法。其中单向观测法不能有效地减弱或者消除大气折光和地球曲率的影响,精度较低,仅适用于距离较短、精度要求不高的情况;对向观测法是在两测站分别设置仪器各进行一次单向观测,由于本文中需观测的点在屋顶上,设置仪器不方便,所以本文使用三角高程测量的中间观测法进行水准测量。
测量机器人(Measurement Robot;Georobot)能够进行自动搜索、跟踪、辨识和精确照准目标,同时获取目标的角度、距离、三维坐标及影像信息,是一种智能型测量仪器。它具有一般全站仪的所有功能,同时集成了光电测距系统、电子测角系统、步进马达驱动系统、CCD影像传感器、ART自动目标识别机构等装置,具有很强的自动目标搜寻、自动目标识别以及精确照准功能,能够在较短的时间内对多个观测目标自动进行周期性测量,具有较强的实用性。TM50是徕卡公司开发的新一代无棱镜监测精密机器人,它以高精度、高速度、全自动化设计,可保证全天候无间断工作,并确保所采集数据的高质量和高可靠性,同时TM50具有坚实、可靠、低维护成本和低能耗的特点,可进行远程自动化监测。
测量机器人三角高程测量采用中间法三角高程测量原理:为了测定A、B 两点之间的高差,在A、B之间的中间位置(或任意到两点之间水平距离大致相等的位置,即S1≈S2) P点处安置测量机器人徕卡TM50。
在后视A点上采用强制对中法设置专用棱镜,测出高差 h1;在前视B点采用强制对中法设置的专用棱镜,测出高差h2,则A、B两点的高差为:

公式(1)中,S1、S2分别为设站点P到后视点A和前视点B之间的水平距离,和分别是仪器瞄准后视点A和前视点B上专用棱镜中心的竖直角。
表1 同垂直角和边长的高差精度表
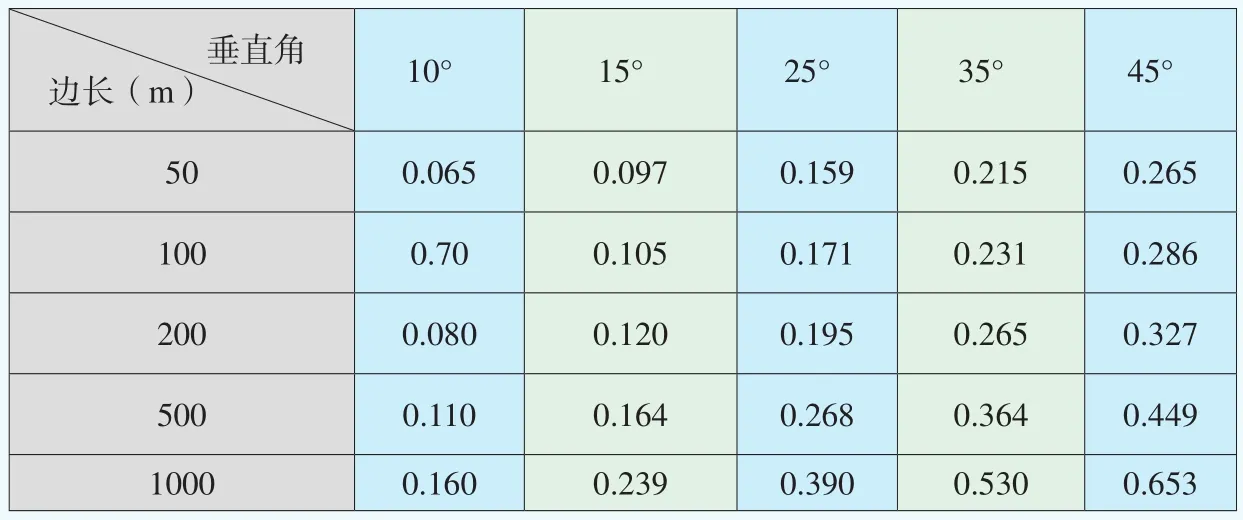
表1 同垂直角和边长的高差精度表
垂直角边长(m) 10° 15° 25° 35° 45°50 0.065 0.097 0.159 0.215 0.265 100 0.70 0.105 0.171 0.231 0.286 200 0.080 0.120 0.195 0.265 0.327 500 0.110 0.164 0.268 0.364 0.449 1000 0.160 0.239 0.390 0.530 0.653
表2 作为限差与二等水准测量限差

表2 作为限差与二等水准测量限差
垂直角边长(m) 10° 15° 25° 35° 45°images/BZ_49_1453_1184_1540_1253.png50 0.130 0.194 0.318 0.430 0.530 1.265 100 0.140 0.210 0.342 0.462 0.572 1.265 200 0.160 0.240 0.390 0.530 0.654 1.788 500 0.220 0.328 0.536 0.728 0.898 2.828 1000 0.320 0.478 0.780 1.060 1.306 4
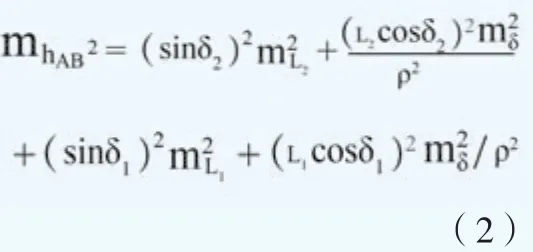
中间法三角高程测量时设站要求前后视距基本相等,所以大气折光差及地球曲率差的影响可以不考虑。由公式(1)可以看出影响高差精度的主要因素是竖直角观测误差和测距误差。
二、测量机器人中间法三角高程测量精度分析
在测量机器人竖直角观测精度和测距精度已知的情况下,由公式(1),根据中误差传播定律可计算高差中误差:
根据《国家一、二等水准测量规范》(GB/12897-2006)的有关规定,二等水准测量每公里往返中误差为1mm。二等水测量往返测高差不符值不得超过。
三、实例验证
在对某市CORS基准站进行二等水准观测时,本单位在使用中间法三角高程测量的同时,为了检验测量结果的精度,也使用了传统的二等水准测量方法,采用水准仪进行了测量。
中间法三角高程测量使用的仪器时测量机器人TM50,并使用机载软件多测回测角程序自动瞄准进行多测回测角。传统水准测量使用的是Ni005A自动安平水准仪进行往返测。通过两种方法测得的高差的差值小于1mm。两个水准点间的距离为200米,则二等水准测量限差为=1.8mm。所以测量结果符合二等水准的精度要求。
四、结论
利用徕卡TM50测量机器人进行三角高程测量中间观测法代替二等水准测量,并通过理论分析和实例比较验证了其在小范围内、两点间高差较大的高程测量时可行性和可靠性。使用TM50测量机器人进行三角高程测量的优点是仪器任意设站,不受地形条件的限制,ATR自动照准功能,克服了人眼照准目标的误差和测程的限制,减少了误差的来源,使用多测回测角程序提高了工作效率。为保证监测精度,除了要注意遵守二等水准观测的相关要求外,还要采取以下措施:设站点应设置在已知点与监测点的中间位置或者到两点之间的距离大致相等;监测点和已知点应尽量设置为强制对中结构,以减少对中等误差的影响。