基于空间机械臂的柔顺抓捕技术研究综述
2019-07-05汤奇荣张凌楷赵庆岩邹怀武
汤奇荣,黎 杰,张凌楷,赵庆岩,李 宁,邹怀武
(1.同济大学 机械与能源工程学院,机器人技术与多体系统实验室,上海 201804;2. 上海宇航系统工程研究所,上海 201109)
0 引言
随着空间探索的深入,空间机械臂愈发广泛地应用于空间任务的各个方面:如空间站的建造与维护、卫星的释放与回收、协助目标卫星交会对接以及协助科学试验等。其中,空间机械臂对于在轨飞行器的精准抓捕通常是以上空间任务得以执行的前提。由于空间的微重力环境,目标物体运动状态常因物体间的碰撞而发生较大突变,导致机械臂对目标物体实施精确抓捕变得极为困难,因此利用空间机械臂对目标物体进行柔顺抓捕具有重大研究意义。空间机械臂系统进行目标柔顺抓捕,其核心是在对目标飞行器进行稳定抓取的前提下,尽可能降低对基体航天器的影响。要实现对目标的抓捕需要经历多个过程,包括目标检测与运动轨迹规划、轨迹跟踪控制、碰撞及抓取目标,以及捕后稳定控制,如图1所示[1]。

图1 空间机械臂系统抓捕目标过程Fig.1 Process of target capturing by space manipulator system
柔顺抓捕按操作机构分为网捕和空间机械臂抓捕2种方式。空间机械臂系统对目标的抓捕具有非破坏性,在空间任务中应用广泛。利用空间机械臂抓捕目标,即通过空间机械臂将末端夹具输送到可抓捕区域中,调整合适的末端执行器位姿实施对目标的抓捕,完成末端执行器和目标的充分接触之后,对目标进行可靠抓夹。与此同时,也需对机械臂-末端执行器-目标新系统进行系统参数辨识,实现对新系统的稳定控制,从而达到对目标的稳定可靠抓取。本文主要探讨当前空间机械臂抓捕机构的现状,以及空间机械臂对目标实现柔顺抓捕控制的方法。
1 主要的空间机械臂系统
著名的在轨服务空间机械臂系统有:航天飞机遥控机械手系统(SRMS)[2]、空间站遥控机械手系统(SSRMS)[2]、日本实验舱遥操作机械臂系统(JRMEMS)[3]、欧洲机械臂系统(ERA)[4],分别如图2~5所示,其特点见表1。其中,加拿大研制的SRMS是第一个在轨环境中应用的自动操作器系统,一直应用在航天飞机上,可协助航天员进行舱外活动。而后期改进型的机械臂系统SSRMS,增加了固连锁紧装置且布置了电气接口,在末端执行抓捕之后,控制中心可以通过机械臂末端与目标飞行器的电气连接实现与目标飞行器通讯并实施控制操作。

图2 航天飞机遥控机械手系统Fig.2 Shuttle remote manipulator system
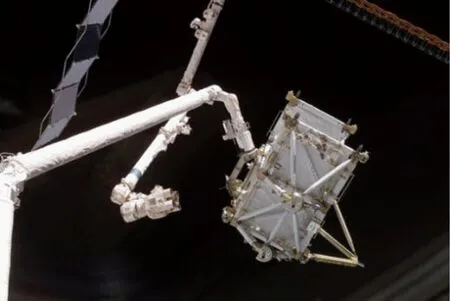
图3 空间站遥控机械手系统Fig.3 Space station remote manipulator system

图4 日本实验舱遥操作机械臂系统Fig.4 Japanese experiment module remote manipulator system

图5 欧洲机械臂系统Fig.5 European robot arm system

表1 典型的空间机械臂系统
国际空间站日本实验舱段搭载的JRMEMS,由主臂和小微臂组成,其中主臂末端搭载了类锥杆钢丝索缠绕式捕获机构,可以在轨抓捕空间飞行器,协助飞行器与国际空间站交会对接。小微臂基座端也设计了可与主臂末端对接的接口,以实现主臂和小微臂联合工作。小微臂末端搭载了腕部力/力矩传感器和手眼相机,使得小微臂可以执行更加精细和复杂的空间任务[5]。其控制方式同样采用宇航员目视遥控的方式进行操作,由传感器和相机调整和纠正姿态,控制成本较高,但运动控制精度有所提高。
欧洲太空局为国际空间站俄罗斯舱段设计建造的大型空间机械臂系统ERA,其采用对称结构设计,末端搭载三边锁扣形式的末端执行器。由于其末端执行器机械结构设计为导入锁扣形式,使得其容差特性较类锥杆抓捕机构差,当机械臂末端位置和速度控制精度较低时易造成抓捕失败。
2 空间机械臂末端机构研究现状
空间机械臂进行目标抓捕任务时,末端执行器的选择对抓捕任务也起着关键的作用。目前研究人员设计的空间机械臂末端执行器机构形式主要有类锥杆式和指爪类两类。
2.1 类锥杆式捕获机构
SRMS,SSRMS和哈勃望远镜维修机器人系统[6]的末端执行器均采用钢丝索缠绕的类锥杆捕获机构进行空间目标物体的抓捕,此类机构具有较大的容差范围和弱碰撞捕获能力。其中国际空间站上的机械臂末端执行器与对接接口如图6所示。图7为类锥杆式末端执行器的抓捕过程,该机构采用三段钢丝索缠绕目标锥杆的方式完成抓捕动作,在完成抓捕动作后,拖动目标,使之与固定刚性接口连接[7]。钢丝索具有一般绳索的柔顺特性,可以降低与目标物体的刚性碰撞,以达到软捕获的目的。

图6 国际空间站机械臂末端执行器与对接接口Fig.6 End-effector and docking interfaceof space station manipulator
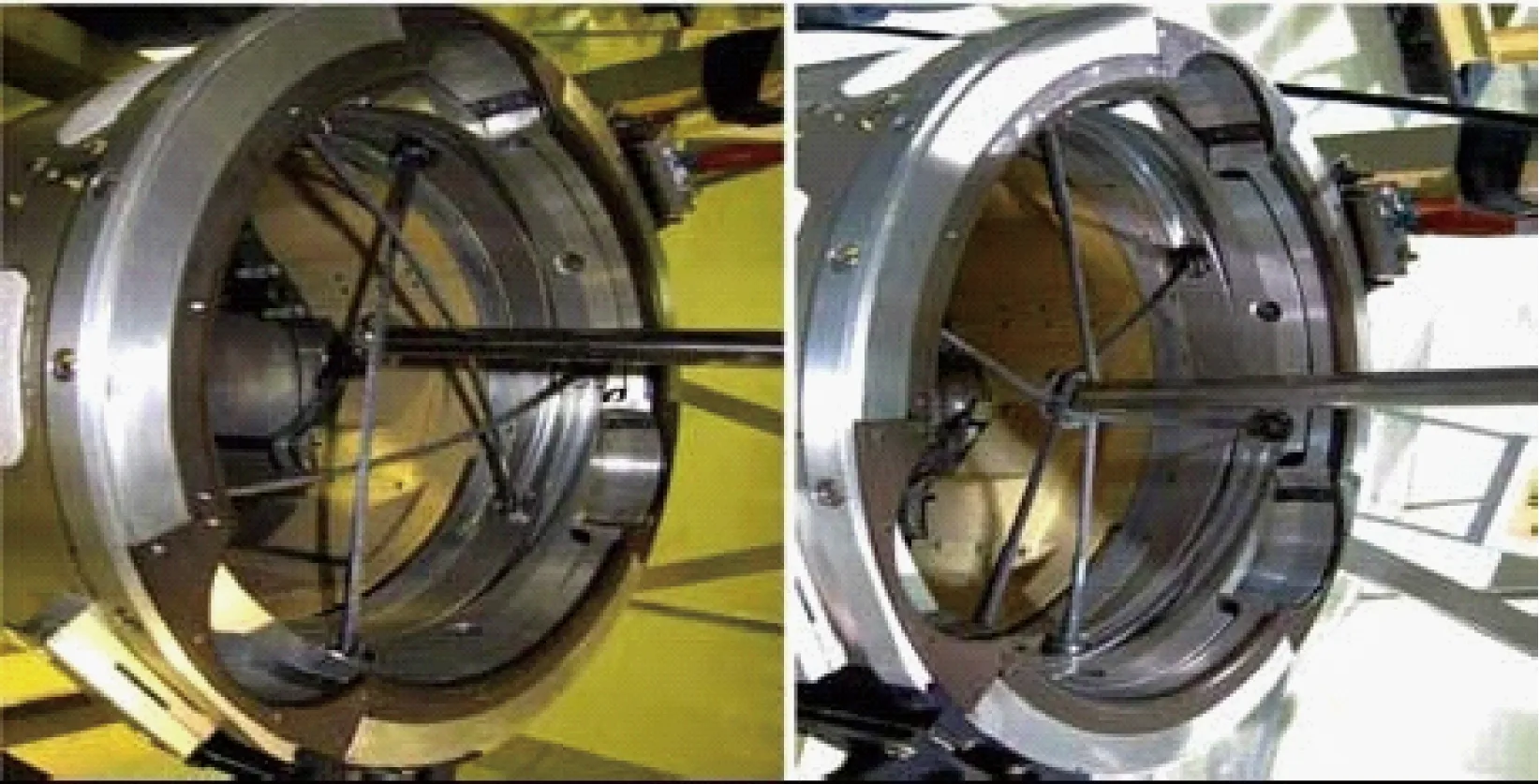
图7 SRMS末端搭载钢丝索缠绕捕获机构抓捕过程Fig.7 Capture process of wire rope windingcapture mechanism of SRMS
欧洲太空局基于Smart-1卫星平台所开发的灵巧轨道延寿飞行器(SMART-OLEV)对接机构为另一种类锥杆式末端捕获机构。SMART-OLEV与目标飞行器对接如图8所示[8]。其对接机构工作原理是将可膨胀的细杆插入目标飞行器的尾喷管的细锥形管中,再将可膨胀的细杆充分展开,进而实现与目标飞行器的连接,即可靠抓捕目标飞行器,如图9所示。此种捕获机构可实现对合作和非合作目标的抓取,但其捕获控制复杂,对目标飞行器尾喷管的形状要求较高。

图8 SMART-OLEV与目标卫星对接Fig.8 SMART-OLEV docking with client satellite
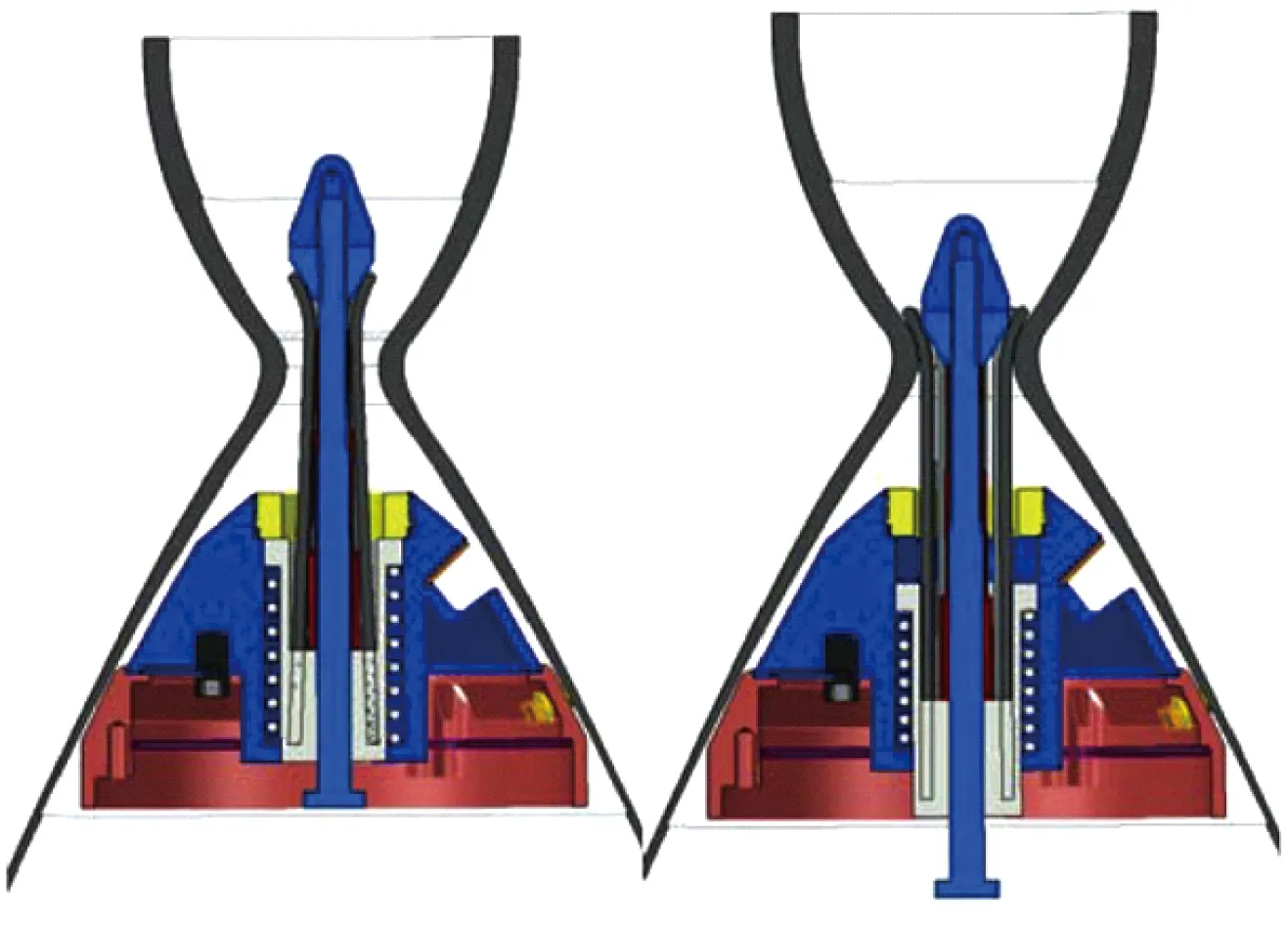
图9 SMART-OLEV对接机构工作原理图Fig.9 Schematic diagram of SMART-OLEV docking structure
2.2 指爪类捕获机构
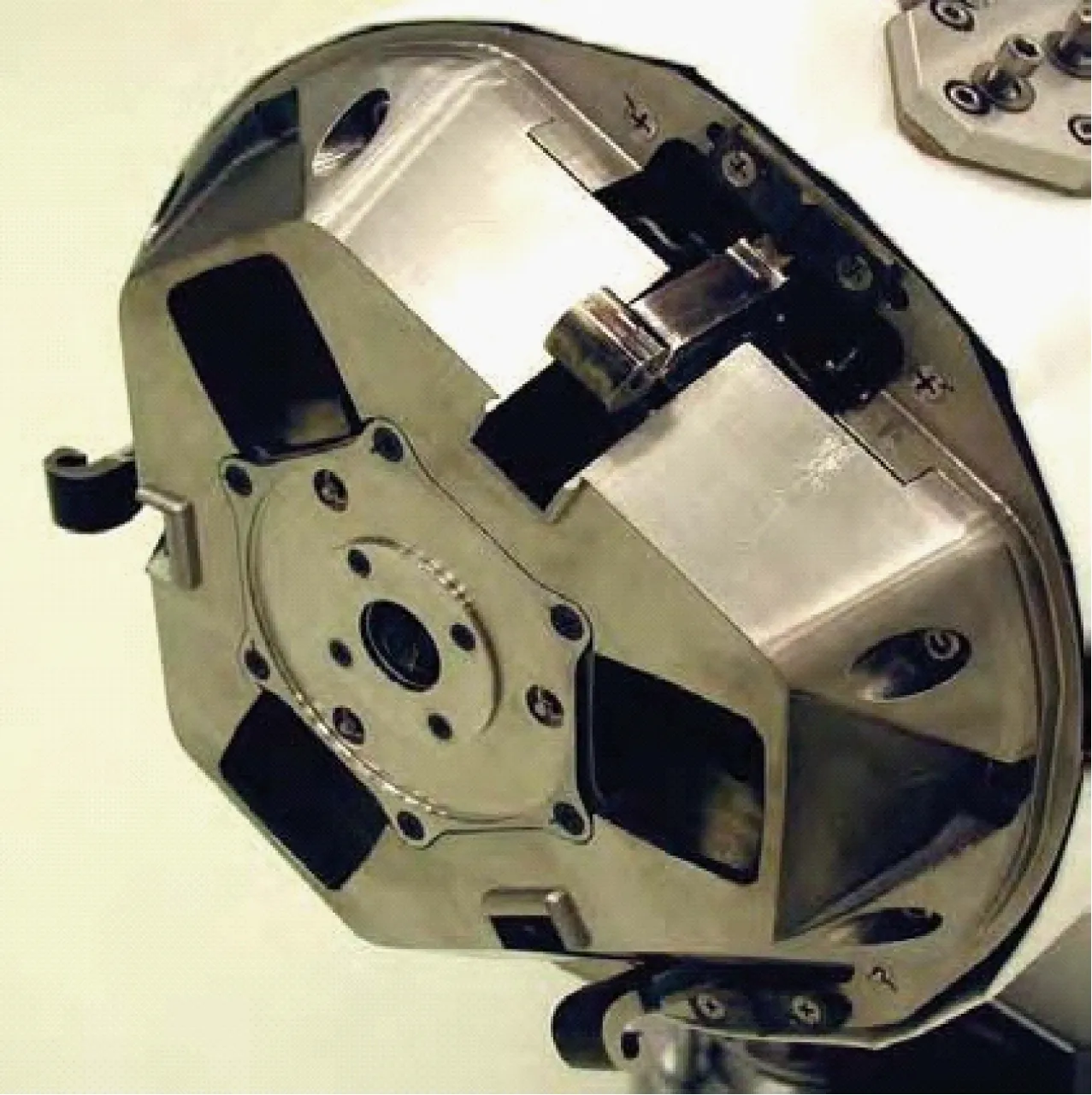
图10 ERA末端导入式三角锁扣抓捕机构Fig.10 Import triangle lock arresting mechanism of ERA
ERA末端搭载导入式三角锁扣抓捕机构,如图10所示[9]。因该末端执行器较钢丝索缠绕式抓捕机构的抓捕成功率低,故对该型机械臂末端进行改进,在其末端增加了一套类锥杆型钢丝索缠绕捕获机构,弥补了该型末端机构的部分缺陷。美国轨道快车项目,在最终实施阶段采用了加拿大MDA公司为轨道快车项目设计的三指-三瓣式抓捕对接机构,即轨道快车抓捕系统,如图11所示[10]。
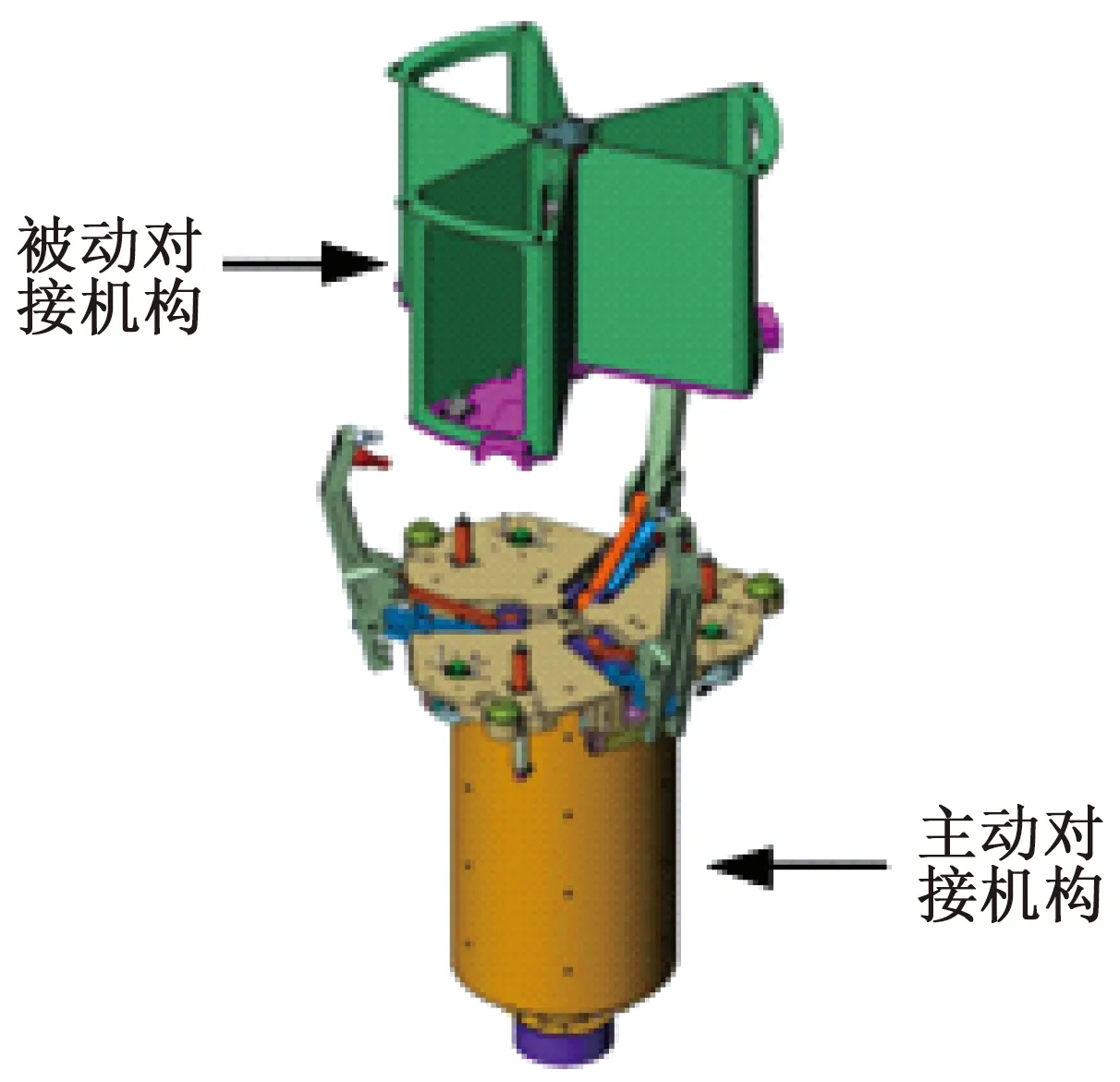
图11 轨道快车抓捕系统示意图Fig.11 Orbital express capture system
在实际结构设计与改进中,在微重力实验平台上进行了充分的微重力实验,验证了该抓捕对接机构的可靠性[11]。该抓捕对接机构具有一定的抓捕容差特性,目标物体与末端机构3个方向上的角度偏差范围为±5°,轴向平移偏差为±65 mm,径向平移偏差为±70 mm[10,12],可在一定容差范围内实现特定目标物体的抓捕操作。但是由于三指爪型结构设计,使得抓捕目标物体必须具有特定的三瓣式结构,才可实现抓捕,不具备非合作目标的抓捕能力。而轨道快车抓捕系统,相较于国际空间站上在轨运行的几款空间机械臂末端执行器,其容差能力不及空间站机械臂末端执行器,但也可满足其执行较高精度操作的任务要求。
此外,类似三指爪型末端抓捕机构设计的还有空间站专用灵巧臂系统中的欠驱动自适应机械手(SARAH),如图12所示。SARAH与轨道快车抓捕系统采取类似的结构原理,其主要区别于在于SARAH采用欠驱动的控制方式,使得该末端执行器可以抓捕不同外形的目标物体,具有较大的容差特性,同时可抓捕未知外形的非合作目标物体,可以通过遥操作执行空间站维护和部件更换任务,在一定程度上代替宇航员执行舱外任务[13]。图13为SARAH抓取柱形物体实验。该末端执行器具有一定包络目标外形的能力,但由于其不可延展性,使得可抓捕物体的体积受限,当目标物体的包络体积超过自适应机械手时,无法完成抓捕操作。由于体积结构限制,该型末端执行器较难应用于空间大型飞行器的抓捕任务。

图12 欠驱动自适应机械手Fig.12 Self-adapting robotic auxiliary hand

图13 SARAH抓捕圆柱形物体Fig.13 SARAH capturing cylindrical object
2.3 我国空间机械臂末端执行器相关研究
我国空间机械臂相关研究起步较晚,国内研究机构在早期研发阶段,多采用类三指爪式末端抓捕机构。哈尔滨工业大学与德国宇航中心设计的三指爪末端抓捕机构,如图14所示[13]。该机构在执行抓捕任务时,两端弧形机构同时向中间夹紧闭合,最终三指交叉固定目标物体。但该型末端执行器由于结构柔顺特性欠缺,很难降低与目标物体碰撞动能。
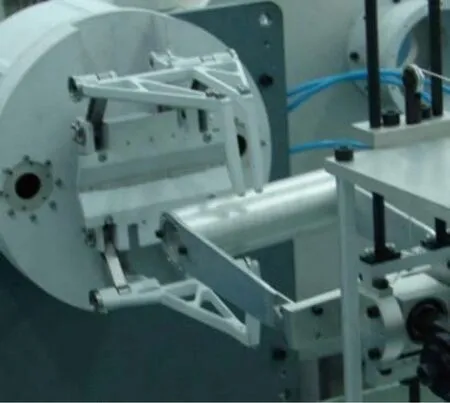
图14 哈尔滨工业大学与德宇航联合研制的末端执行器抓捕实验Fig.14 End-effector developed by HIT and DLR
此外,哈尔滨工业大学机器人研究所参考国际空间站末端执行器设计,研制了一款同样以钢丝索缠绕捕获方式实现抓捕操作的末端执行器,如图15所示。该末端执行器与国际空间站通用末端机构采用相同抓捕原理[14-15]。此外抓捕成功后,末端机构的4个固连装置可以提供16 kN的夹紧力,以确保机械臂末端与目标物体的高刚度连接[16]。骆敏舟等[17]设计了自主抓取流程与抓取方式,并采用模糊神经网络控制,进行抓取操作训练,最终研制出适应抓捕不同外形目标任务的欠驱动手爪。

图15 哈尔滨工业大学研制的空间机械臂末端执行器Fig.15 Space manipulator end-effector developed by HIT
以上空间机械臂末端执行器主要通过设计具有柔顺结构的抓捕装置实现目标物体的柔顺抓捕。除了在硬件结构上增加抓捕装置柔顺特性,在控制方法上,不同空间机械臂系统也用了不同的柔顺控制方法,空间机械臂的柔顺控制也是国内外学者研究的热点。
3 空间机械臂柔顺控制
空间机械臂系统的控制主要包括:抓捕操作前,空间机械臂的轨迹跟踪控制;抓捕操作时,对末端执行器抓捕进行柔顺控制;抓捕成功后,对系统进行振动抑制控制。而空间机械臂的柔顺控制,主要是末端执行器进行目标抓取时的柔顺控制。
空间机械臂系统存在高度非线性和强耦合的特点,传统的控制方法(如PID控制)将空间机械臂系统近似线性化处理,使得控制模型不能很好地反映空间机械臂的动态特性,因此传统控制方法较难实现空间机械臂柔顺控制。柔顺控制是一种使系统适
应各种不同外界环境,根据外环境作用力、扰动等变化做出响应的一种控制方法。其中系统柔顺性分为被动柔顺和主动柔顺,被动柔顺主要依靠硬件结构的柔顺变形实现;而主动柔顺性则要依靠控制方法实现,其核心为力柔顺控制。应用较为广泛的主动柔顺控制方法主要有阻抗控制、力/位置混合控制。在基础柔顺控制方法基础上,结合现代控制算法使机械臂的柔顺控制方法进入新的智能化阶段,同时有更多的研究人员参与到智能柔顺控制的研究当中。
1) 阻抗控制
HOGAN[18]提出通过调整末端执行器的位置来控制接触力的大小的方法。根据控制量的不同可分为位置阻抗控制和力阻抗控制。针对空间机械臂执行抓捕任务,要求其末端执行器与目标物体的接触碰撞力控制在一个较小的范围内,力阻抗控制更符合其要求。阻抗控制是通过调整参考位置间接地实现力控制的,而实际应用中,工况很难进行测量和预估,即使较小的测量误差也将导致很大的输出力误差,因此,LASKY等[19]提出了内外环控制策略,通过建立力误差二次型性能指标以获得外环参考位置的修正率,其动力学的不确定性在内环的位置控制中得到补偿。董晓星[20]采用基于位置的力柔顺阻抗控制方法,实现空间机械臂的柔顺控制。SALISBURY[21]通过定义末端执行器力和位置的线性关系,选择刚度矩阵定义机械臂末端在约束方向上的顺应性,但是该方法忽略了全局动态稳定性。YAO等[22]将滑模控制引入到阻抗控制中,在滑动模态中包含了理想的阻抗关系,但其对力的精确跟踪控制需要对环境的精确建模,有明显缺陷。在阻抗控制中,针对现代机器人的应用要求,虚拟阻抗概念也在控制方法中得到了广泛应用。NAKABO[23]在虚拟阻抗的基础上提出了视觉阻抗的概念,将视觉反馈信息与阻抗控制相结合,实现对于机器人末端执行器的阻抗控制。
传统的阻抗控制中,其系统的刚度和柔顺性的矛盾使其应用具有一定局限性,需要进行优化。
2) 力/位置混合控制
RAIBERT等[24]于1981年提出通过雅克比矩阵将空间任意方向的力和位置分配到各个关节上,达到力和位置的共同控制。力/位置混合控制的核心是在系统一些自由度上采用力控制,其余自由度采用位置控制,以实现综合控制的目标。
力/位置混合控制过程中,根据系统与外环境是否接触而变换控制模式,可以控制接触力随期望值变化,但控制器结构要根据系统与环境接触的动力学特性确定[25]。经典的力/位置混合控制器如图16所示。位置控制环和力控制环都是平行地在各自的约束空间中独立完成的,在混合控制中需要不断地在2个空间来回切换,计算复杂度较高,同时该方法未考虑机械臂末端力与位置的耦合效应,因此系统稳定性较差。ZHANG等[26]提出了直接将位置的期望转化为机械臂各个关节的期望转角,直接控制机械臂关节。覃海强[27]在经典的R-C控制器基础上,引入梯度投影法,最终设计实现基于梯度投影法的力/位置混合控制方法,并通过仿真验证其方法的可行性。
尽管力/位置混合控制方法已经被广泛应用于工业生产中,仍然存在一些问题:对环境未知的情况下,该控制方法难以确定控制矩阵参数;由于力和位置对系统刚度的不同要求,难以在实际控制中根据任务要求作出变化。传统力/位置混合控制方法具有一定的应用局限性,需要结合其他智能控制算法进行改进和优化。

图16 经典R-C控制器结构图Fig.16 Classical R-C controller structure diagram
3) 现代柔顺控制方法
空间机械臂系统具有高度非线性,同时有较多未知干扰对系统产生影响,在执行抓捕任务时,面临着模型参数不确定,外界干扰不确定、非合作目标抓捕参数不确定等问题、经典控制理论难以实际应用。因此,与智能算法相结合的柔顺控制也是空间机械臂控制方法的一大发展方向。马小良[28]将自适应算法引入到阻抗控制器中,设计了自适应阻抗控制器,间接调节目标阻抗参数,提高系统对环境适应能力和抗干扰能力。高道祥等[29]针对力/位置混合控制器易受外界干扰而失稳的缺点,引入自适应算法,使系统应对外环境干扰能够自行调节系统参数,系统鲁棒性得到提高。OSYPIUK等[30]根据机械臂力/位置混合控制要求,改进模型跟踪控制算法,添加了模型输出、被控对象和模型反馈,实现接触力控制,增加了系统鲁棒性。SONG等[31]在控制系统中加入带光滑鲁棒补偿器的滑模结构,增强了系统抗干扰能力。CHIAVERINI[32]考虑了接触环境刚度未知的条件下的力/位置并行控制,采用带有期望力前馈的逆动力学方程构成控制器,并由一个力误差驱动的更新算法进行自适应,实现约束方向上的力控制和无约束方向上的运动控制,但由于其模型过于复杂在实际问题中难以求解,因此其应用具有局限性。现代柔顺控制理论由于其本身具有控制模型复杂和较小的适用范围等缺点,使得其理论多在计算机仿真中进行验证,因此要在实际系统中应用现代柔顺控制方法,仍需对其进行相应改进。
4) 智能柔顺控制方法
有研究人员将人工智能方法应用于机械臂的智能控制中。张庆利等[33]将模糊自适应的方法与柔顺控制相结合实现三指空间机器人柔顺抓取控制,并取得较理想实验结果。CONNOLLY等[34]将多层前向反馈神经网络和力/位置混合控制结合起来运用于机械臂的控制中,前馈神经网络用来辨识机械臂系统中的不确定模型参数,并成功运用于2自由度的机械臂仿真控制中。JEON等[35]将机器学习算法与力/位置混合控制结合成功运用于机械臂的控制,并发现在每次操作中力、位置误差的矫正,呈现渐进稳定的特性。JUNG等[36]将神经网络算法应用到阻抗力控制中,神经网络算法在控制中用来补偿机器人模型的不确定性,针对机器人驱动力矩和位置的阻抗控制器都增加了系统的鲁棒性。TANAKA等[37]通过基于神经网络的在线学习方法整定阻抗控制参数,将其应用于机械臂阻抗控制中,通过整定机械臂末端位置、速度、力和环境辨识参数,使控制系统具有较好的鲁棒性。XU[38]提出了主动柔顺与被动柔顺相结合的观点,针对设计的机械手腕,采用模糊控制的方法进行插孔实验。YANG等[39]利用模糊规则和语言变量整定神经网络参数,通过神经网络学习优化,使系统有自适应能力补偿干扰。周晓东等[40]将粒子群算法与阻抗控制模型相结合,对阻抗控制参数进行优化,经仿真实验证明其控制方法具有较好的鲁棒性。国内不少学者在模糊智能算法与柔顺控制相结合的方面做了深入研究[41-44]。
智能算法与传统控制算法结合,例如模糊理论和阻抗控制理论结合,与神经网络学习算法结合,都仅处于控制参数的调整阶段,还有较大的应用空间有待发掘。柔顺控制目前广泛应用于工业机械臂的控制,但在空间应用领域仍需要进一步研究和拓展。
4 空间机械臂系统柔顺抓捕技术的发展
空间机械臂系统的应用仍存在较多的发展空间,特别是在柔顺抓捕技术上。例如空间机械臂的在轨操作仍依赖于宇航员或者地面遥操作站的控制;末端执行器的功能过于单一化,大型空间机械臂较多用来协助空间飞行器与空间站等大型飞行目标的交汇对接,而对于小范围的特殊精准操作需要借助于特殊灵巧机械臂,而灵巧臂的末端由于体积限制无法完成较大空间目标的抓捕工作。因此空间机械臂系统在柔顺抓捕技术上仍需进行深入研究。
我国正在自主研发空间机械臂系统,将在空间机械臂柔顺控制、合作目标与非合作目标柔顺抓捕等方面进行研究。根据现有的空间机械臂系统的研究和应用,空间机械臂柔顺抓捕技术还有以下关键技术亟待解决:
1) 空间机械臂的柔顺抓捕技术与目前主要人工智能算法相结合,如深度学习、机器学习等。实现在无宇航员操作情况下,空间机械臂对于目标物体完成自主抓捕。
2) 空间机械臂系统末端需要配备一款具有一定通用性的末端执行器,不仅可以满足合作目标的抓捕,还可以实现一定规格的非合作目标的抓捕。
3) 空间在轨作业中,双臂或者多臂系统的协同作业,是空间机械臂实施柔顺抓捕操作的另一发展方向,多臂系统对于目标抓捕的容差性能将大幅提高,抓捕成功率也较单臂系统更高。多臂系统也为空间机器人完全代替宇航员出舱活动带来更大的可能性。