分布式动力翼身融合构型气动性能研究
2019-07-03熊永臻
熊永臻


摘 要:在针对下一代低噪音、低污染民用航空器的设计中,翼身融合布局(BWB)结合分布式推进系统被认为是最有可能替代传统客机的设计方案。结合NASA提出的N3-X下一代BWB飞行器,首先建立了BWB飞行器模型,随后针对该模型在有无分布式动力推进系统的工作状态下的气动性能进行了CFD计算。通过对计算结果的分析,发现采用分布式动力的BWB飞行器相比传统不考虑动力与翼面气动耦合的飞行器其升力更高,升阻比更高。此种构型的飞行器对降低能源消耗、提高飞行都产生了积极影响。
关键词:翼身融合飞行器;分布式动力;耦合布局
中图分类号:TB 文献标识码:Adoi:10.19311/j.cnki.1672-3198.2019.11.105
1 研究背景
在人类历史上对飞行器的研究过程中大部分时间都处于将拆散了的各个部分(如:发动机、机身、机翼及起落架等)进行组装及设计阶段,总觉得这样设计与生产飞机是比较可取的方法。再后来,随着飞行器的性能越来越强,部分与整体之间的矛盾显现出来了。总体来说,从20世纪到21世纪,人类设计出的飞行器性能虽有不小进步,但受限于技术水平与设计理念,传统飞行器的效率很难再有突破性的提高。这个问题主要体现在两个方面:首先是民用飞机由于布局局限导致的气动性能较差、燃料消耗率高、飞行成本更高,进而使得传统布局的飞行器有效载荷受限;而在军用飞行器设计方面,效率与安全性问题之间的矛盾则尤为突出。
随着民航客机对低油耗、低噪声、高效率的不断追求,“筒体-机翼”构型飞行器可挖掘的潜力已经越来越小。在亚音速民用飞行器“动力-机体”耦合设计方面,为了进一步提高效率,降低污染,大涵道比涡扇发动机应运而生,涵道比的增加带来了理论热循环效率的极大提升。但同时,涵道比过大也会使得飞行器的最大飞行速度受到限制。最新一代的大涵道比涡扇发动机直径已经超过3米,继续通过增大进口风扇尺寸来提高效率已经没有太多潜力可挖。
在此基础上,飞行器设计工作者们提出了“分布式推进”这一新概念航空动力形式。分布式动力构型相对简单,结合电齿轮后理论涵道比远超目前已有的大涵道比涡扇发动机,极大地拓展了噴气式航空发动机对效率进一步挖潜的可能。同时,翼身融合飞行器作为一种先进的理念比以往的“筒体-机翼”构型飞行器拥有更高的效率与安全性。
针对“分布式动力”这个概念,如何设计与构思新型的飞行器,并保证其具有优良的气动性能是目前航空领域的一个比较前沿的研究方向。本文主要针对采用分布式动力的翼身融合构型飞行器的气动性能进行研究,探究采用分布式涵道风扇取代传统大涵道比涡扇发动机对于翼身融合构型飞行器气动性能的影响。
2 分布式动力翼身融合飞行器模型设计
结合飞行器设计中的翼身融合这一概念,分布式动力对于翼身融合式飞行器(BWB)的整机气动性能提升有着很大的潜力。因此本文首先根据NASA公布的N3-X概念建立翼身融合飞行器模型,并在此基础上对不同布置形式的涵道风扇参数对于飞行器的气动性能影响进行研究。
2.1 飞行器CFD模型
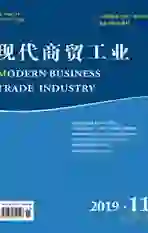
根据NASA提出的BWB飞行器概念,本研究首先建立了分布式推进系统与翼身融合(BWB)布局飞行器模型。该飞行器气动外形由中心体、融合段、外翼段以及推进系统组成,其分布式电推进系统位于中心体后段上表面,主要目的是为了在保证飞行器配平的情况下尽可能多地利用分布式电涵道的抽吸作用推迟机身上的附面层分离,从而提高飞行器的升阻比。其中飞行器长45m,翼展72m,最大起飞重量230吨,设计座位数在350左右,尺寸上满足NASA对于下一代民运飞行器的设计要求。同时,为了对比有无分布式推进系统对于BWB飞行器的气动性能影响,本研究分别建立了有无涵道的飞行器模型,用来进行计算对比。其三维几何模型如图1所示。
2.2 CFD计算模型介绍
对于本研究中设计的分布式动力飞行器的气动性能研究是采用商用CFD软件Fluent进行计算。采用四面体非结构网格划分流场区域。此模型结构相对简单,经网格无关性验证,综合考虑计算资源及计算精度后,选取网格节点约为270万可以兼顾计算精度和计算速度。计算模型的边界条件为压力远场条件,压力远场为边长为270m的矩形,压力值为101325Pa,温度为300K。飞行器的飞行速度范围在0.3Ma~0.8Ma之间。湍流模型选取k-e二阶方程,第一层壁面网格尺寸为0.1mm。在水平恒定来流的情况下进行多组计算,变量包括飞行器的迎角、飞行速度。通过统计计算所得的升力、阻力、升阻比等数据,对不同工况下的飞行器气动性能进行对比分析。
针对有涵道的模型,由于分布式动力涵道风扇各个动力单元性能近似,布置紧凑,进出口均为矩形。为简化计算网格数量,采用矩形截面进出口边界条件代替涵道风扇叶片网格进行设置计算。其中涵道进口设置为进口压力边界条件,为101325Pa;参考出口设置为出口喷流速度边界条件,相对速度为40m/s。
3 分布式动力翼身融合飞行器计算结果分析
通过对干净翼身融合构型和带涵道的翼身融合构型在0°、3°和5°迎角;不同来流速度(0.3Ma-0.8Ma)下进行计算,共计算12个不同工况的模型。接下来将对计算所得结果进行分析及对比。
3.1 分布式动力对构型升力、阻力的影响
首先是BWB飞行器在3°迎角下涵道动力与不带动力BWB飞行器升力阻力对比,如图2所示。进一步对飞行器在上述工作状态下升阻比进行对比,绘制升阻比曲线如图3所示。
当迎角为3°,马赫数为0.4Ma时,升力为47.1吨,阻力为22.7吨,此时升阻比为2.02。当马赫数增加时,升力与阻力也在增加升阻比也在缓慢增加直到马赫数为0.6-0.7Ma之间,升阻比在迎角为3°时最大约在2.85左右。当机身迎角为5°时,当马赫数在0.3-0.7Ma内时,随着速度的增加,升力大幅增加,阻力小幅增加,升阻比急剧增加,最高升阻比约为103。当马赫数超过0.7Ma时,升力急剧下降。由此可知当机身迎角为5°时,升阻比最大时马赫数约为0.7Ma。
通过数据对比可知涵道机翼与干净机身在相同工况时,阻力有小幅度升高,如迎角为3°时,马赫数为04Ma时,带涵道的飞行器其升力可达87.1吨,阻力为26.8吨,升阻比为3.24。相比于相同工况下干净机身的升阻比为2.02,带涵道的飞行器升阻比更高。当迎角为5°,马赫数为0.4Ma时,带涵道的飞行器其升力为246.5吨,同条件下干净机身时升力为189.4吨。根据第二章提出的本飞行器设计最大起飞重量230吨的要求,飞行器起飞时采用5°迎角工况。考虑到本文计算模型未能将襟翼在起降阶段的增升效果进行模拟,因而该飞行器在实际5°迎角、0.4Ma工况的起飞状态时,其所获得的升力应该会更大。这也就保证了该飞行器的最小离地速度不高于350km/h。
3.2 流动特性的影响
进一步对上述飞行器工况的计算结果进行分析,截取涵道动力与不带动力BWB飞行器航向速度分布云图,如图4所示。
由上图可知,机头处干净机身与涵道机翼气流速度图像几乎吻合。干净机身时机身处空气流动速度较高,但在上下机身处又有不同。机身上表面流速明显高于下表面,因为机翼上表面曲线的形状和附面层扩展的影响而导致靠近后缘处气流发生分离,流动速度明显较低,影响了BWB构型飞行器上表面的吸力分布,导致飞行器抬头力矩增大。
当为涵道机翼时,可以看出机身部气流速度与干净机身时大致相似,但是由于机身上表面靠近后緣位置布置一排分布式涵道风扇,其工作时产生的抽吸作用对BWB飞行器机翼上表面的附面层起到了抽吸加速的作用。同时,涵道风扇后部的喷流效应也使得其后部的机翼气体流速相对于干净机翼明显增高。两种飞行器在低速区的比较上涵道动力飞行器明显低速区更小,尤其是它的机翼上表面的低速区,相比较于不带动力的干净飞行器明显缩小。
4 结论
本文通过对涵道动力与不带动力BWB飞行器进行设计和CFD气动仿真计算。在限定了相同的远场边界条件包含压力、来流马赫数、来流迎角等,通过对计算结果中的升力、阻力、升阻比和机身附近气流流动速度进行分析比较,得到了如下结论:
(1)针对本文设计的符合NASA提出的N3-X飞行器,采用了分布式涵道动力后,相同速度相同迎角下,飞行器的升力明显增大,阻力略有增大,升阻比有明显提升。
(2)涵道动力与不带动力BWB飞行器翼型表面空气的流向速度分布方面,带涵道动力的高速流动区覆盖的弦长区域相对较大,并且由于涵道的抽吸、喷流协同作用使得低速流动区域所占的弦长范围明显减小。这两种因素叠加在共同使得带分布式涵道动力的BWB飞行器的升力和升阻比均比不带动力的干净BWB飞行器更大。
(3)采用分布式动力的BWB飞行器相比传统不考虑动力与翼面气动耦合的飞行器其升力更高,升阻比更高,从而在相同工况下减轻了发动机推力以及功率的负担。对于资源的有效利用及新一代飞行器更高效率的实现都产生了积极影响。
参考文献
[1]孔祥浩,张卓然,陆嘉伟,等.分布式电推进飞机电力系统研究综述[J].航空学报,2018,(1):46-62.
[2]崔容,潘天宇,李秋实,张健.边界层抽吸效应对分布式推进系统气动性能影响数值研究[J].航空动力学报,2018,33(05):1076-1083.
[3]段静瑶,袁巍,李秋实.分布式动力系统尾缘射流与边界层抽吸的数值分析[J].航空动力学报,2015,30(03):571-579.
[4]薛奎举.分布式油电组合动力无人机设计及性能分析[D].沈阳:沈阳航空航天大学,2018.
[5]张小伟.面向2030年的分布式混合电推进技术[A].中国航空学会.2015年第二届中国航空科学技术大会论文集[C].中国航空学会,2015:5.
[6]张小伟.美欧积极探索2030年民用航空分布式混合电推进系统[N].中国航空报,2014-12-02(T07).