三维激光扫描仪点云数据的应用研究
2019-07-02贺婧
贺 婧
(杨凌职业技术学院 交通与测绘工程分院, 陕西 杨凌 712100)
0 引 言
近年来,随着科技的不断进步,测绘技术的应用也与时俱进。数字城市、逆向工程、虚拟现实等工程都必不可少的需要建立三维几何建模,而传统的AutoCAD、3D Max等软件已经无法满足对复杂曲面建模的需要,因此出现了三维激光扫描技术。与传统测量方法相比,三维激光扫描仪采用非接触的测量方法对复杂物体进行测量,直接得到物体表面的点云数据,再重构出任意曲面。用传统方法测量时很可能造成物体变形,而且精度较低,但是以三维激光扫描仪为测量手段,不会造成物体变形和损失。
1 原 理
三维激光扫描技术能对复杂物体进行测量,获取点的三维坐标。三维激光扫描仪是结合激光测距仪和角度测量进行快速测量的仪器,能够直接获取物体表面的天顶距、水平角、斜距,然后自动计算得到点云数据[1]。其坐标测量原理如图1所示。
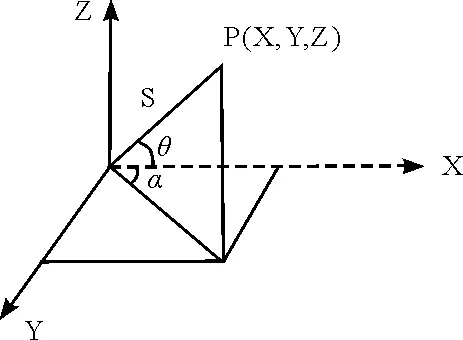
图1 点云测量原理
将X轴、Y轴形成的面规定为横向扫描面,横向扫描面与Z轴垂直。三维激光扫描系统主要由三部分组成:电源供应系统、扫描仪、控制器。仪器通过两个反射镜快速运转,向测区发射激光脉冲,扫过整个区域,测量每个激光脉冲到物体的往返时间,进而计算距离[2]。并且利用时钟控制编码器测出激光纵向扫描角度观测值θ和脉冲横向扫描角度观测值α,即可求得P点坐标为:
XP=S*cosθ*cosα
YP=S*cosθ*sinα
(1)
ZP=S*sinθ
此时得到的P点坐标以特定格式存储,可用以下几种软件进行读取和处理:LMS-Z420等强大功能的点云数据处理软件、CYRAX2500的YCLONE软件、 OPTEC的ILRIS-3D软件[3]。
2 点云数据处理
由于点云数据带有光学特征信息、高密集度、大数据量,因此点云数据的处理即为复杂,处理流程见图3。
2.1 数据获取
由三维激光扫描再经过可视化处理获得点云数据,最常用的有长距离和短距离两种激光扫描仪,长距离扫描仪常用于建筑测量、矿山测量、水利大坝测量。目前手持式FASTSCAN三维激光扫描仪、高精度VIVID910三维激光扫描仪都是短距离扫描仪。获取点云数据时应注意以下几个问题:1.精度问题。为了达到更高的建模精度,可以缩短扫描间距,设置在毫米级,那么间距越小,精度则越高。2.完整性问题。为了得到扫描物体的全貌,应尽量选择周边地物遮挡少、视野开阔的位置进行测量。3.重叠性问题。为了提高内业处理时的精度,需要让点云数据之间有一定的重叠度,应尽量在3个以上的衔接点再进行拼接。因为三点形成的图形稳固了点在三维空间上的几何强度。
2.2 数据配准
利用四元数配准法[3],通过计算特征向量,进而推算出旋转矩阵,确定平移向量进行配准,如图2所示:

图2 数据配准
2.3 表面特征提取
点云数据的表面特征提取非常关键,其主要包括三角网建立、数据的分割、数据的缩减、曲面拟合等内容。利用临近区域切平面投影建立三角网格;数据的分割即先对点云数据进行分块,再进行平面的拟合;数据的缩减即确定点云数据的长方体,细化点云数据三维边界框;曲面拟合即一般自有参数化曲线和曲面的基本形式和拟合[4]。
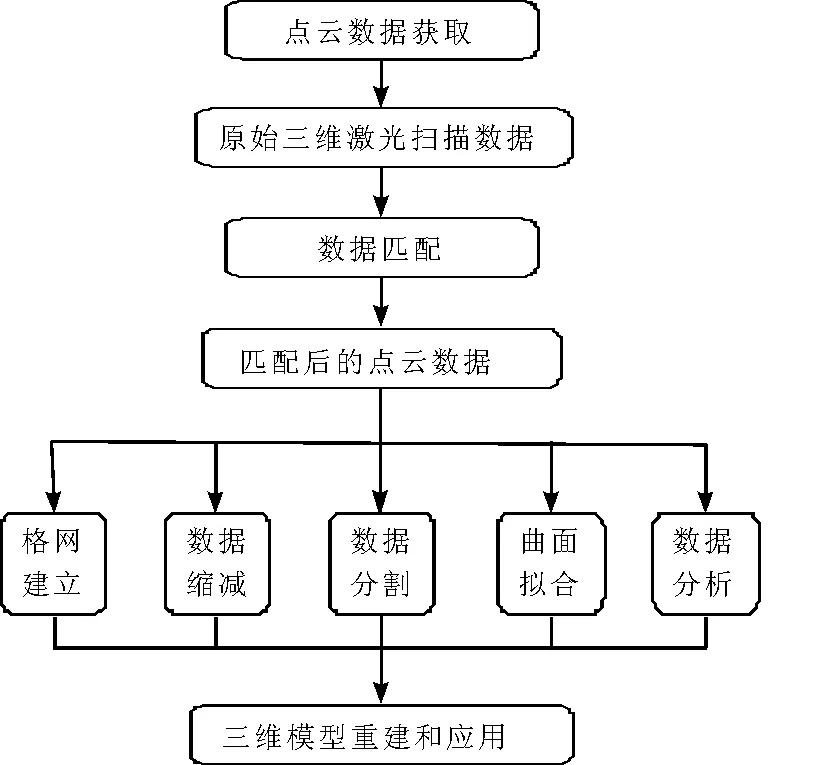
图3 点云数据处理流程
2.4 三维激光扫描数据处理过程
基于三维激光扫描数据的三维模型重建技术课通过三维图形可视化、工程数据库管理技术、数据处理建立可用的三维模型。三维可视化软件有DIRECT 3D接口、OPENGL接口、AUTOCAD平台。三维实体建模的实现方法有:边界表示法、混合模式、构造立体几何法、八叉树表示法。
3 项目实例
以新建铁路成都至贵阳的一段滑坡重点阐述点云数据在Geomagic中的处理过程,通过三维激光扫描共553 358个点,由于点过于密集,因此调整采样为33%比例得到图4。

图4 调整采样比例后的滑坡图
由图4看出此时点数为182 608个,但是滑坡扫描的模型未变,为后续处理带来便利。由于仪器、天气、环境等因素,使得点云数据中产生多出噪声点,而噪声点会使滑坡的外形准确反映出来,为了后续的处理工作,需要将点云数据中的噪声点通过geomagic进行消除,如图5、图6所示:

图5去噪前滑坡 图6去噪后滑坡
由图5可看出红色点为噪声点,共10 407个,为了去除尽可能多的噪声点,需要重复做三次,图6为去除噪声后的效果图。噪声去除后,可用108 810个点云数据,对点云数据进行封装即可得到三维模型图,可以看出在灰色阴影区域都有不同程度的滑坡现象,如图7所示。
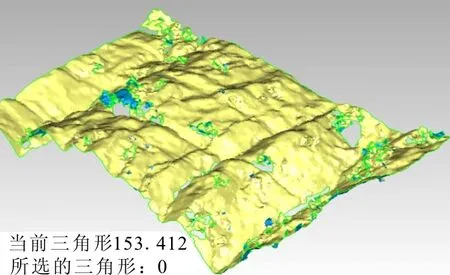
图7 滑坡三维模型图
4 总 结
通过对三维激光扫描原理的介绍,三维激光扫描仪最大的优势是非接触的测量方法对复杂物体进行测量,直接得到物体表面的点云数据,再重构出任意曲面。验证了点云数据在实际工程中的应用。三维激光扫描测量是测量的一种手段,在参加测量项目时,应多注意整体流程和相关细节,争取对一些测量方法和数据处理方法进行改进。在将来的工作中,应继续研究三维激光扫描技术与常规测量的结合,将区域坐标系统统一到一个整体坐标系中,会得到更好的精度。