基于NX的玻璃取放机械手的结构设计与建模
2019-07-01王振宇刘芬
王振宇 刘芬
摘 要:目前NX软件是世界上比较先进的设计和制造一体化的三维参数化软件,其对机械产品的设计发展有着不可替代的作用。文章利用NX11.0软件对玻璃取放机械手进行三维建模和整体装配,从而将机械手的外观、结构组成及特点以及各部件之间的装配关系形象地展现出来,充分体现了NX软件在机械产品设计过程中的实用性和先进性。
关键词:玻璃;机械手;NX;三维建模
中图分类号:TP241 文献标志码:A 文章编号:2095-2945(2019)14-0080-02
Abstract: At present, NX software is an advanced three-dimensional parametric software integrated with design and manufacturing in the world, which plays an irreplaceable role in the design and development of mechanical products. In this paper, NX11.0 software is used to model and assemble the glass pick-and-place manipulator, so that the appearance, structure composition and characteristics of the manipulator and the assembly relationship between the components can be displayed vividly. It fully reflects the practicability and advanced nature of NX software in the process of mechanical product design.
Keywords: glass; manipulator; NX; 3D modeling
引言
NX是一款交互式CAD/CAM/CAE一體化软件,最初的NX软件需要依据工作站进行工作,但随着信息技术的逐渐发展,现阶段的NX软件已经能够独立使用。目前,NX软件在机械产品设计中的应用比较广泛,能够为产品设计和加工的过程提供数字化的验证方式。NX软件已成为当今世界机械CAD/CAM/CAE领域的新标准,全方位的提供了从产品概念设计、精确设计、模具设计到模具型腔数控加工的一整套功能,从根本上改变了传统的设计、生产、组织模式,极大的缩短了产品开发的周期,提高了产品的竞争力。玻璃具有良好的透视性、透光性、化学稳定性等优点,能够较好的隔声、保温等,被广泛地应用于人们的日常生活中。但同时玻璃也有易碎、浅薄、锋利,而且不便于取放等缺点。随着玻璃的大量生产,玻璃的运输和取放也成为生产过程中耗时间最长的一个步骤。本文设计了一款应用于大型玻璃加工厂的玻璃取放机械手,该机械手能够在生产和运输玻璃的过程,安全、迅速地取放玻璃,从而大幅度减少玻璃取放的时间与成本,降低玻璃的生产费用,减少玻璃在运输过程中的损耗。本文在对该机械手进行了结构设计和校核计算的基础上,利用NX11.0软件对其底座、机械手臂、机械手爪、传动装置等组成部分进行三维建模和整体装配。形象、具体地展现了该产品的整体外观、组成结构和各部件之间的装配关系等,为下一步的优化设计和产品推广提供直观的资料,缩短研发周期,提高设计效率。
1 结构组成
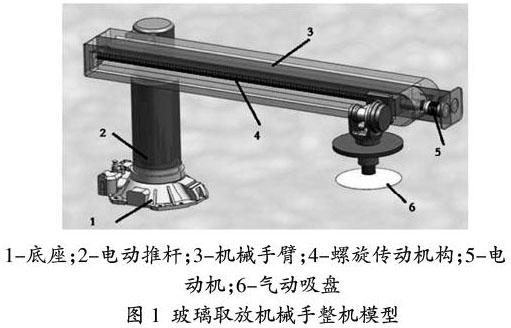
本文所设计的玻璃取放机械手具有结构简单、操作灵活、性能安全、工作效率高等优点。其装配完成后的整机模型如图1所示,主要由底座、电动推杆、机械手臂、螺旋传动机构、电动机和气动吸盘等组成。1-底座;2-电动推杆;3-机械手臂;4-螺旋传动机构;5-电动机;6-气动吸盘
1.1 机械手臂
机械手臂安装在电动推杆上,能够随电动推杆上下移动。同时,通过齿轮齿条传动,机械臂还可实现左右平移,从而带动吸盘上下左右移动,实现玻璃的灵活取放。
1.2 螺旋传动机构
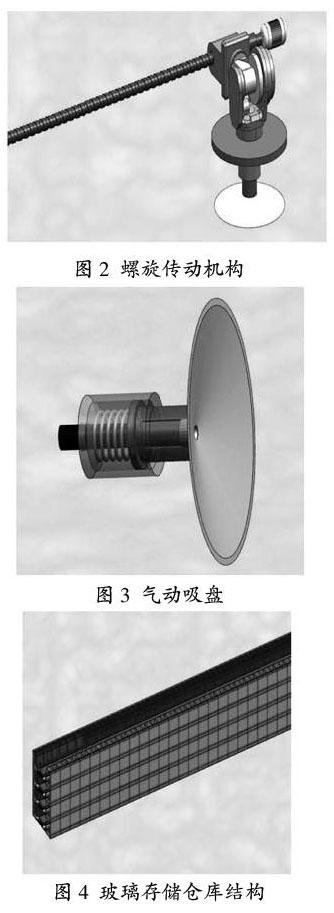
由于玻璃的取放需要平稳移动,故在机械手臂和气动吸盘之间采用螺旋传动机构,如图2所示。选择滚轴丝杠作为传动部件,将旋转运动转化为直线运动,可以承受很高的负载,且传动平稳。
1.3 气动吸盘
该机械手采用气动吸盘吸住玻璃来实现玻璃的取放,气动吸盘需根据玻璃的大小和厚度进行设计。气动吸盘内有正负气压产生器,正压可将玻璃表面吹干净,而负压可以使吸盘紧紧的吸住玻璃。可通过传感器来控制正负气压的产生与停止,保证了玻璃的稳定移动的过程。气动吸盘的具体结构如图3所示。
2 工作原理
2.1 工作环境
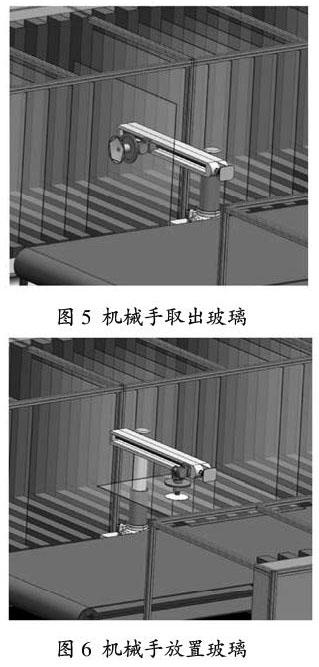
如图4所示为应用该玻璃取放机械手的玻璃存储仓库结构。两侧为用于放置玻璃的仓库,中间为用于玻璃传输的传送带,传送带两侧有平行的导轨用于该机械手的移动。该仓库结构紧凑,能够实现在狭窄的空间范围内存储、取放玻璃,有效减少了占地面积。
2.2 工作过程
该机械手的底座沿与传送带平行的导轨移动,当移动到需要取的玻璃的存储位置时,机械手臂向存储仓方向平移,气动吸盘也会在螺旋传动机构的带动下平移到机械手臂的最右侧,从而使吸盘准确地吸住玻璃的中心位置,如图5所示。
机械手吸住玻璃后,在电动推杆的带动下机械臂升高到合适位置,机械臂沿水平导轨向传送带方向移动,同时气动吸盘吸附着玻璃在螺旋机构的传动下移动到机械臂的最右端。当玻璃到达传动带正上方后,气动吸盘翻转90°使玻璃转变为水平状态,电动推杆落下,从而使玻璃平稳放置在传送带上。如图6所示。
3 结论
本文所设计的玻璃取放的机械手采用螺旋传动机构、气动吸盘、电动推杆等,配合专用的玻璃存储仓库,能够实现安全、高效地存储和取放玻璃。该机械手为全自动操作,精确度高,工作方式平稳可靠,较大地缩短了玻璃存储和取放的时间,提高了生产效率,降低了生产成本,具有良好的实际应用价值和市场潜力。同时,本文利用NX11.0软件对所设计的玻璃存储仓库和取放机械手进行三维建模、整体装配和运动仿真,以视频的方式将该机械手取放玻璃的过程清晰地展现出来。在不需要制造出真正产品的情况下,即可使用户对该机械手有直观、形象的认识,并可根据需要随时修改各部分的结构和尺寸,充分体现出了CAD/CAM/CAE技术应用于现代机械产品设计的优势。
参考文献:
[1]张立红,黄晓明,赵娟.UG软件在机械设计中的应用与研究分析[J].世界有色金属,2018(12):263+265.
[2]赵立勋.三维CAD软件在机械设计与制造中的应用分析[J].中国设备工程,2017(19):147-148.
[3]鲁海斌,刘晓红.UG软件的二次开发研究与应用[J].电子技术与软件工程,2019(03):33.
[4]刘芬.基于UG的小型手推剪草机结构设计与建模[J].科技致富向导,2014(33):24-25.
