基于不同视觉范围的逆光照明质量研究
2019-07-01何世永黄友林
梁 波,陈 凯,何世永,黄友林,3,张 逸
(1. 重庆交通大学 土木工程学院,重庆 400074; 2. 重庆交通大学 山区桥梁与隧道工程国家重点实验室培育基地,重庆 400074; 3. 重庆工商职业学院 城市建设工程学院,重庆 400052)
0 引 言
随着国内经济的快速发展,我国的公路建设日益加快,公路隧道越来越多。截至2017年底,全国公路隧道为16 229处,1 528.51万米。公路隧道的增多对隧道的照明质量也提出了新的要求。隧道照明的目的是提供良好的可见度,将光线投向障碍物正面并提高路面的整体亮度,达到提高驾驶员辨识障碍物能力的目的。目前的研究常通过改变隧道照明布灯参数等方式来提高隧道的照明质量。逆光照明即是优化布灯参数的一种形式,它能够提高背景亮度和对比度,减小光线的散射和反射,降低隧道照明功耗[1-2],很早就被应用于国外的工程实践中[3]。但国内对逆光照明的试验研究很少,主要是通过软件模拟[4-6],以规范中的亮度等物理指标评价逆光布灯的照明质量。
随着对隧道照明环境质量研究的深入,发现在相同物理指标的照明环境下,面对突然出现的障碍物,不同生理状态的驾驶员反应快慢不一样。而影响驾驶员反应速度的因素是视觉功效,因此越来越多的学者采用更合理的视觉功效指标来评价隧道照明质量[7-9]。可见度水平作为一种视觉功效评价指标,被国际照明委员会CIE纳入技术报告中。小目标可见度作为可见度水平的加权平均值,考虑了物理亮度和人眼的适应水平等多种因素,也被美国照明协会推荐用来评价隧道内的照明质量。但除了徐昕[10]利用模型试验研究了双侧对称布灯的逆光照明角度对小目标可见度的影响之外,基于STV值的隧道逆光照明研究很少。
小目标可见度虽然能够很好地评价隧道照明质量,但对不同视野范围内的测点也只考虑了物理视角的影响[11],并未考虑不同视野范围对应的视网膜分辨能力的差异性。人眼视觉是通过视锥细胞和视杆细胞对亮度、颜色等视觉信息的接收和传达形成的。视锥细胞主要集中在视网膜中央,视杆细胞主要集中在视网膜边缘。由于不同的视觉细胞对视觉信息的分辨能力不同,使得驾驶员识别不同视觉范围内的物体的反应快慢不一样。将进一步考虑人眼视网膜分辨能力的影响因素,通过逆光照明模型试验研究不同视野范围内测点的STV值变化规律,为修正小目标可见度计算模型和更合理地评价隧道照明质量提供新思路。
1 逆光照明和小目标可见度
1.1 逆光照明
逆光照明是指灯具光线投向汽车行进的反方向,集中照向障碍物的背面,达到提高障碍物与背景亮度对比度的目的[4]。障碍物与背景的对比度越高,驾驶员越容易发现目标[12]。因此在合理的范围内降低隧道的照明亮度,逆光照明也能保证良好的视看环境,对提高隧道照明质量具有重要的意义。逆光照明示意图如图1。
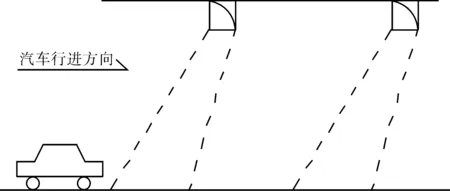
图1 逆光照明示意Fig. 1 Schematic diagram of backlighting
1.2 小目标可见度
一个障碍物要被看见需要一定的亮度和对比度。对比度越大,物体的可见度越高。目前常用可见度水平来评价物体的可见度,表示为
ΔL=Lt-Lb
(1)
式中:VL为可见度水平;ΔL为目标物和其背景亮度的亮度差值;Lt和Lb分别为目标中心亮度和目标的背景亮度;ΔL0为一定大小的目标刚刚能被看见时的目标与其背景的亮度差阈值,与背景亮度、对比度和人眼适应水平等因素有关,同时还需要对其进行观测者的年龄、负对比等相关系数的修正,最终的亮度差阈值修正模型为
(2)
式中:k为统计数据:α为物体对人眼的张角;φ和L为与背景亮度Lb相关的经验公式计算值;AF和Fcp分别为年龄和负对比修正系数。
由此可见,可见度水平综合考虑了照明质量的物理评价指标和人的生理心理参数,但其计算非常复杂,只有经过合理的简化之后才能形成实用的计算式。小目标可见度STV值即是路面测点可见度水平的加权平均值,如式(3)~式(5):
RWVL=10-0.1×|VL|
(3)
(4)
STV=-10×lg(ARWVL)
(5)
式中:RWVL为加权可见度水平;ARWVL为加权可见度水平的平均值。
观察者距离路面1.45 m高,从1°观察角注视前方83.07 m处垂直放于地面的小目标。按此方法测量,通过式(1)~式(5)计算即得到小目标可见度。由逆光照明的特点可以发现,逆光照明具有更高的对比度,小目标可见度更大。但由以上各式可以看出,对于不同视野范围内的测点,VL只考虑了物理视角的影响,并且ARWVL是所有计算测点的等权重平均值,忽略了不同视野范围对应的视网膜分辨能力的差异性。
1.3 中央视觉和周边视觉下的STV值
人眼的视觉根据视野范围分为中央视觉和周边视觉。视网膜中央窝的直径大约为2.5 mm,对应的视野角度大约为2°,称为中央视觉。中央窝以外的视网膜对应的视觉范围称为周边视觉。驾驶员能直接识别中央视觉下的障碍物,对周边视觉探测到的运动物体只能通过转动眼球,利用中央窝来分辨具体的细节[13]。在亮度、颜色等视觉信息的接收和传达速度方面,中央视觉与周边视觉都存在明显的区别[14]。因此在不同的视野范围中,面对具有相同可见度水平的目标,驾驶员的反应快慢不一样。为了更准确地用小目标可见度来评价隧道照明质量,需要对可见度水平进行视网膜分辨能力差异的修正,并在加权计算STV值时考虑不同视野范围的影响权重。即分别考虑中央视觉和周边视觉下的小目标可见度,记为STVf和STVp,测点数n修正为中央视觉和周边视觉下的测点个数nf和np,分别准确地表示中央视觉和周边视觉下的路面可见度水平,从而更好地考虑人眼不同视野范围分辨能力的差异性,为更为合理地评价隧道照明质量提供参考。
2 试验方法及数据处理
2.1 试验方法
室内隧道模型为1∶10的三车道单向隧道,模型断面宽1 m,高0.9 m,可以根据需要更换不同的侧壁材料。隧道采用中央布灯方式的无极调光调色温LED灯,能根据工况改变灯具的布置间距、角度等参数,同时设置不同的照明色温和亮度,对研究隧道照明具有重要的作用。
试验测量布置参考文献[15]中的布点方式,在一个照明设计工况内,测点的横纵间距均为10 cm,每增大1 m的布灯间距纵向增加一排测点,如图2。
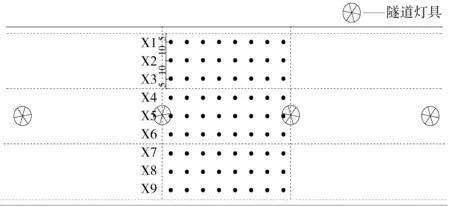
图2 9 m布灯间距下的测点布置示意Fig. 2 Measuring point layout under the lighting stance of 9 m
每个测量点上放置大小为1.8 cm×1.8 cm、漫反射率为0.5的小目标,采用Radiant成像式亮度计来测量小目标亮度Lt及背景亮度Lb1和Lb2。
2.2 试验步骤
试验开始前调节LED灯的色温为4 500 k,调整路面亮度使其在中间视觉亮度范围内,并保持灯源光通量不变,模拟隧道基本照明段的照明环境。
首先设定灯具逆光角度为0°,隧道侧壁材料为瓷砖(漫反射率0.5),将PR-655成像式亮度计布设在隧道模型中间车道X5正前方8.3 m,布设高度为14.5 cm,对每一测点的背景亮度和小目标亮度进行测量,如图3。
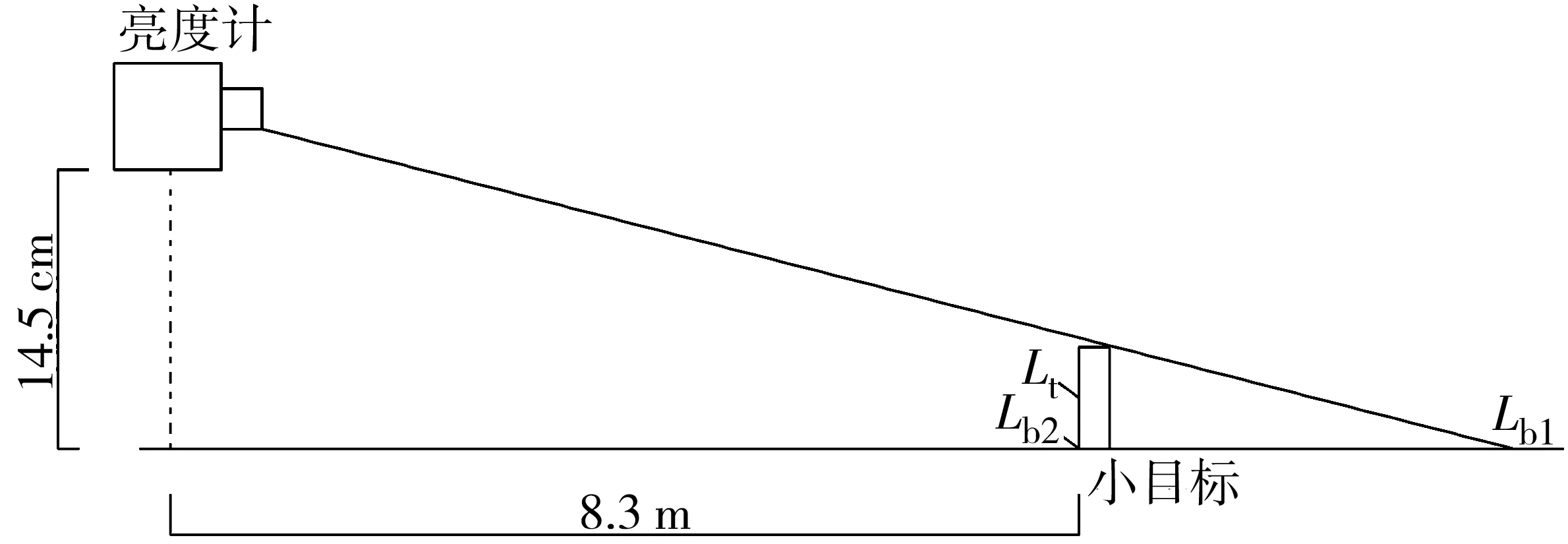
图3 小目标可见度测试示意Fig. 3 Schematic of small target visibility test
再更换侧壁为新型硅酸盐高漫反射率侧壁材料。新型硅酸盐高漫反射率侧壁材料漫反射率高达0.83,其独特的高漫反射特性能够使该侧壁材料成为“二次光源”辅助隧道照明,提高隧道路面的亮度和均匀度[16]。测量每个测点的背景亮度和小目标板亮度,然后改变灯具逆光角度分别为10°、20°、30°、40°、45°,按照以上步骤进行测量。实验过程中保持灯光轴线在路面中线上,保证灯具两侧配光相同,每个工况测量3次并取平均值进行最后的数据计算。工况表如表1。

表1 逆光照明实验工况Table 1 Backlight lighting experiment conditions
2.3 数据处理
中央窝直径约为2.5 mm,对应的中央视觉范围约为2°。照明停车视距取60 m,以此计算出一个照明计算单元(两盏灯之间)内的中央视觉和周边视觉范围如图4。中间X3~X7及其纵向上的测点为中央视觉下的测点,X1、X2、X8和X9及其纵向上的测点为周边视觉下的测点。按照上一节的方法对每种工况下的小目标可见度STVf和STVp进行修正计算。

图4 不同视觉范围下测点划分示意Fig. 4 Diagram of measuring point division in different visual range
2.3.1 中央视觉下的STVf值
计算逆光照明下中央视觉范围内各个测点的小目标可见度STVf值,整理数据如表2。
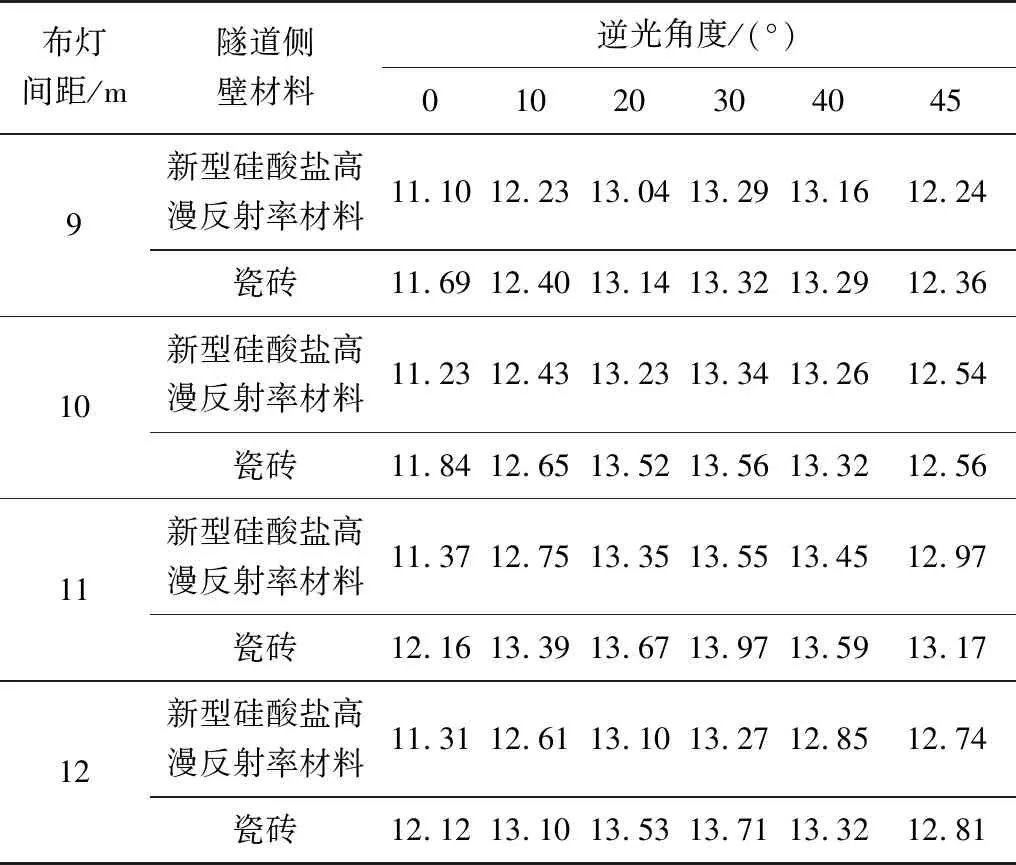
表2 逆光照明下中央视觉范围内测点的STVf值Table 2 STVf value of the measuring point in the foveal vision under backlight illumination
对以上逆光照明下中央视觉范围内测点的STVf值进一步分析,得到如图5~图8所示关系。

图5 9 m布灯间距中央视觉下测点的STVf值Fig. 5 STVf value of measuring point under the foveal vision with lamp distance of 9 m
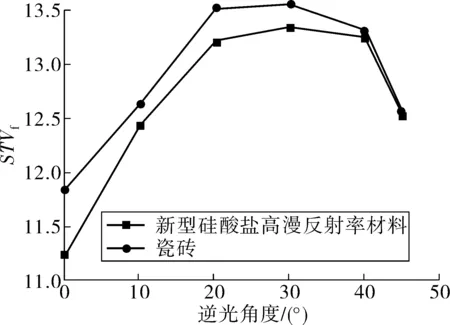
图6 10 m布灯间距中央视觉下测点的STVf值Fig. 6 STVf value of measuring point under the foveal vision with lamp distance of 10 m

图7 11 m布灯间距中央视觉下测点的STVf值Fig. 7 STVf value of measuring point under the foveal vision with lamp distance of 11 m
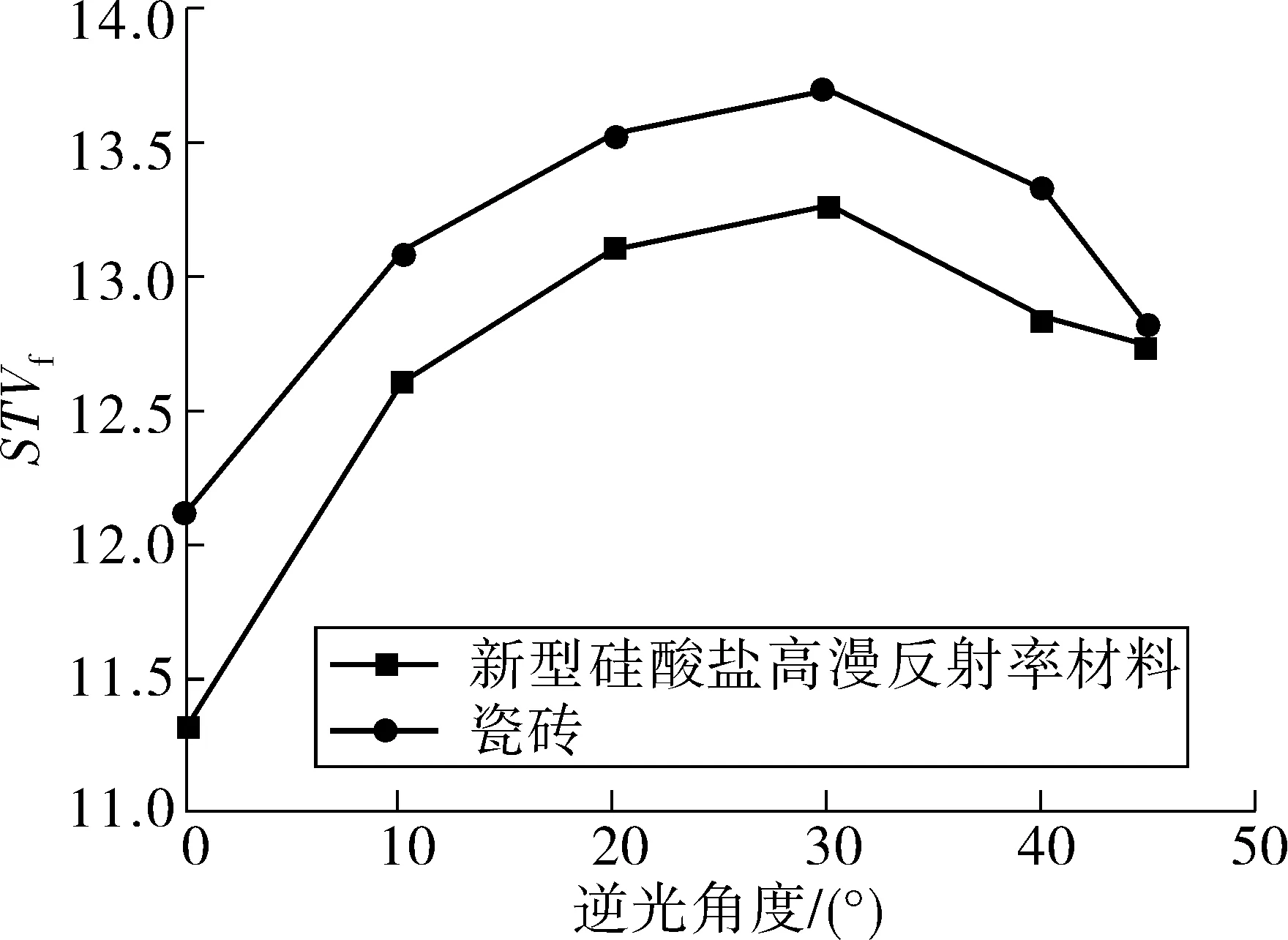
图8 12 m布灯间距中央视觉下测点的STVf值Fig. 8 STVf value of measuring point under the foveal vision with lamp distance of 12 m
由表2可以看出,随着布灯间距的增大,中央视觉下的STVf值呈现出先增后减的趋势,当布灯间距为11 m时各工况下的小目标可见度最大。究其原因,适当增大布灯间距减小了灯具光线之间的重叠区域,使小目标亮度和背景亮度的差值增大,负对比度提高;当布灯间距超过11 m时,光线的重叠区域几乎为0,灯具间距过大使路面的背景亮度变暗,对比度减小,小目标可见度降低。结果证明适当地增加布灯间距不仅能减小隧道照明功耗,还能提高隧道内的可见度,提供良好的视看环境。
由图5~图8可以看出:在各个工况下,随着逆光角度的增大,中央视觉范围内测点的STVf值都呈现出先增后减的变化趋势,证明一定的灯具投射倾角能提高目标和背景的对比度,这也是逆光照明的优势。当逆光照明角度为30°时,驾驶员中央视觉下的视看环境最好,能更快地识别行车正前方的小目标,有利于行车安全。
随着逆光布灯角度的增大,新型硅酸盐高漫反射率材料和瓷砖作为隧道侧壁材料的STVf差值变小。当逆光角度为45°时,两种侧壁条件下的小目标可见度几乎相同,证明逆光角度较大时隧道侧壁反射率对STVf值的影响较小。其原因是当布灯角度较大时,隧道灯源的光线更多地散射到隧道纵向上,入射到隧道侧墙的光通量和侧壁作为“二次光源”反射回隧道内的光通量均较少,小目标和背景的亮度差值变小,对比度降低。因此当逆光布灯角度过大时,不同反射率的隧道侧壁材料对隧道内的照明质量影响较小。逆光角度过大时STVf值减小不利于行车安全,甚至可能造成眩光带来潜在的行车隐患,因此隧道不适宜采用大角度照明布设方式。
由图5~图8可以发现,无论布灯间距多少,瓷砖侧壁的STVf值都比新型硅酸盐高漫反射率侧壁材料的STVf值高。通过分析其测得的原始路面亮度Lb和小目标板中心亮度Lt可以发现,路面亮度比小目标的亮度高。在相同的照明条件下,采用高漫反射率侧壁材料时,路面亮度的增加率小于小目标板亮度的增加率,反而降低了小目标和背景的亮度对比度。由于人眼视网膜对亮度对比度的感知特点,高漫反射率侧壁材料下的STVf值反而比瓷砖侧壁下的STVf值小。根据W. ADRIAN等[17]的研究,可见度水平的加权平均值大于7就能提供良好的视看环境[16]。因此两种侧壁材料下,隧道内都具有良好的照明质量。但高漫反射率材料作为隧道内照明的“二次光源”,能与隧道灯具形成新的组合照明体系,降低隧道照明功耗,对隧道照明的节能运营具有重要意义。
2.3.2 周边视觉下的STVp值
计算逆光照明下的周边视觉范围内各个测点的小目标可见度值,整理数据如表3。
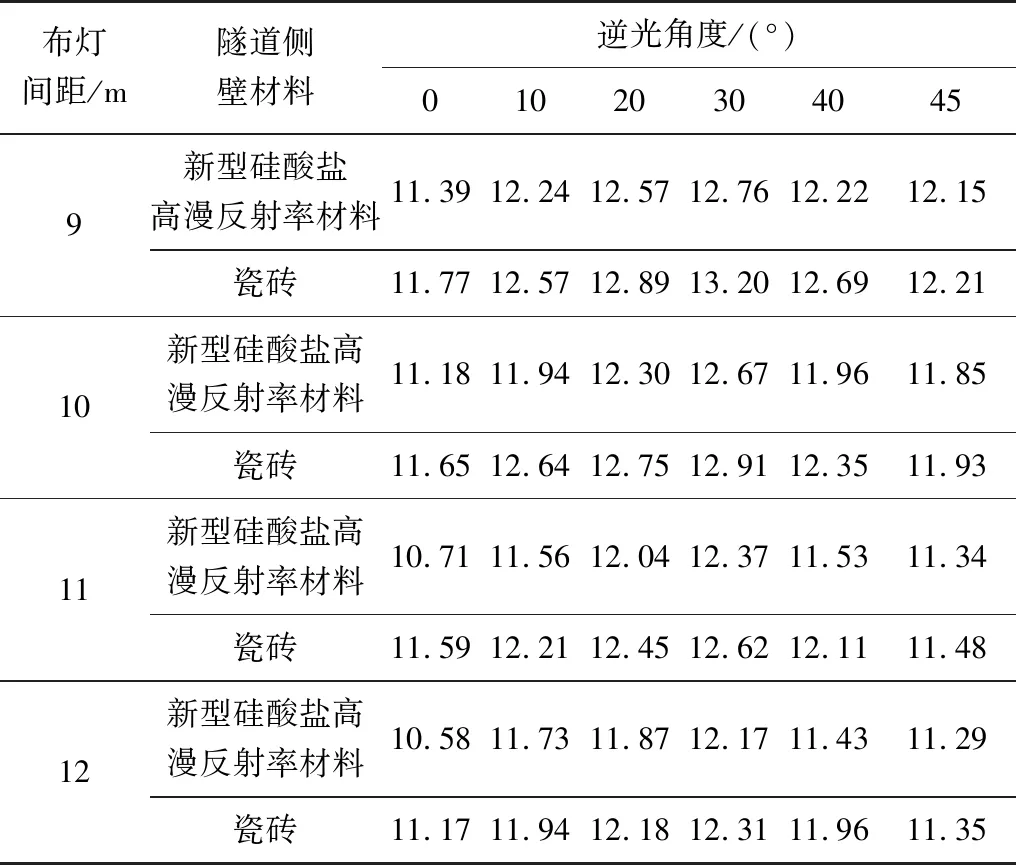
表3 逆光照明下周边视觉范围内测点的STVp值Table 3 STVp value of the measuring point in the peripheral vision under backlight illumination
对表3中STVp值进一步分析得到如图9~图12所示关系。
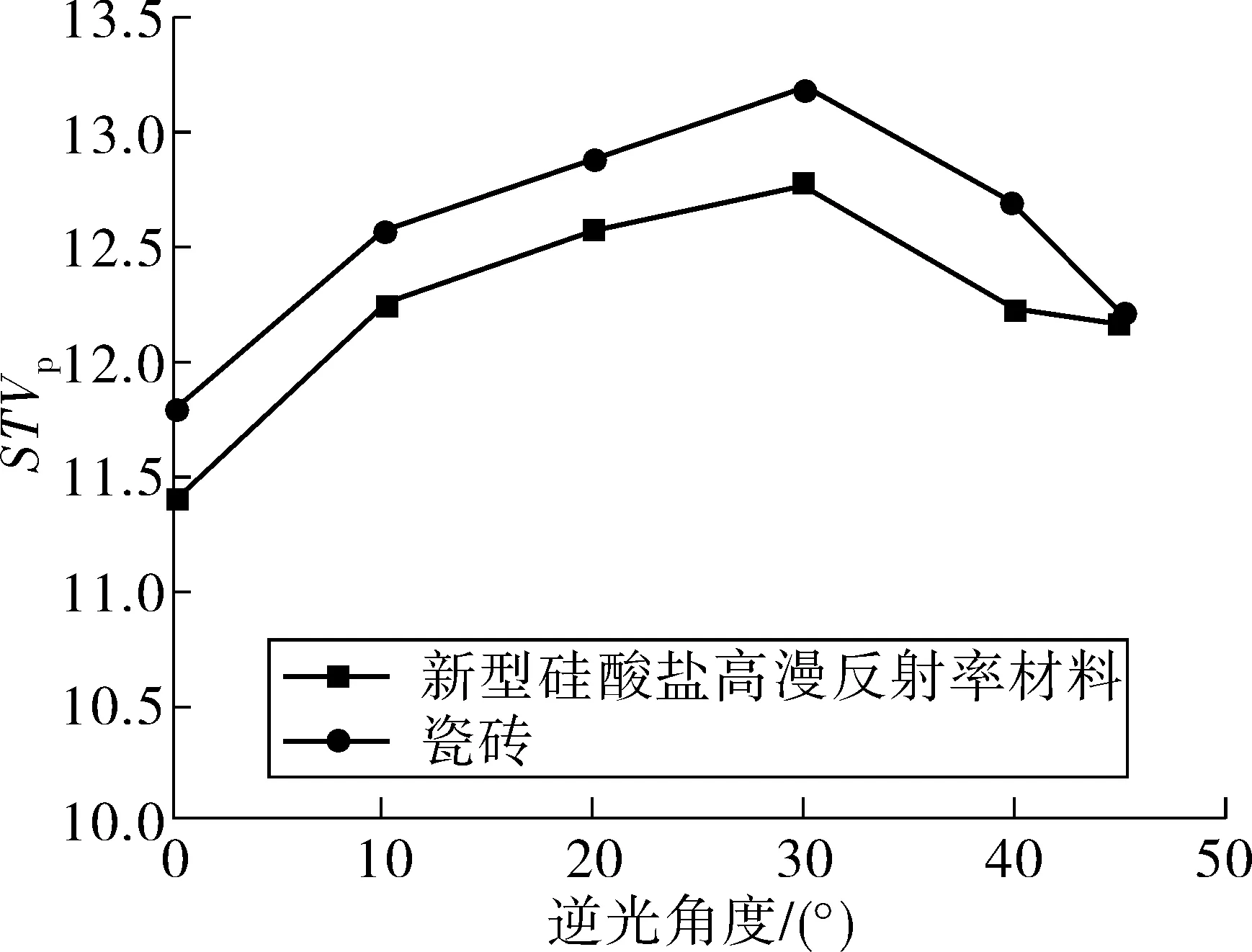
图9 9 m布灯间距周边视觉下测点的STVp值Fig. 9 STVp value of measuring point under the peripheral vision with lamp distance of 9 m
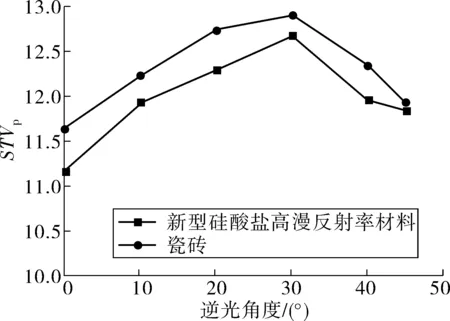
图10 10 m布灯间距周边视觉下测点的STVp值Fig. 10 STVp value of measuring point under the peripheral vision with lamp distance of 10 m
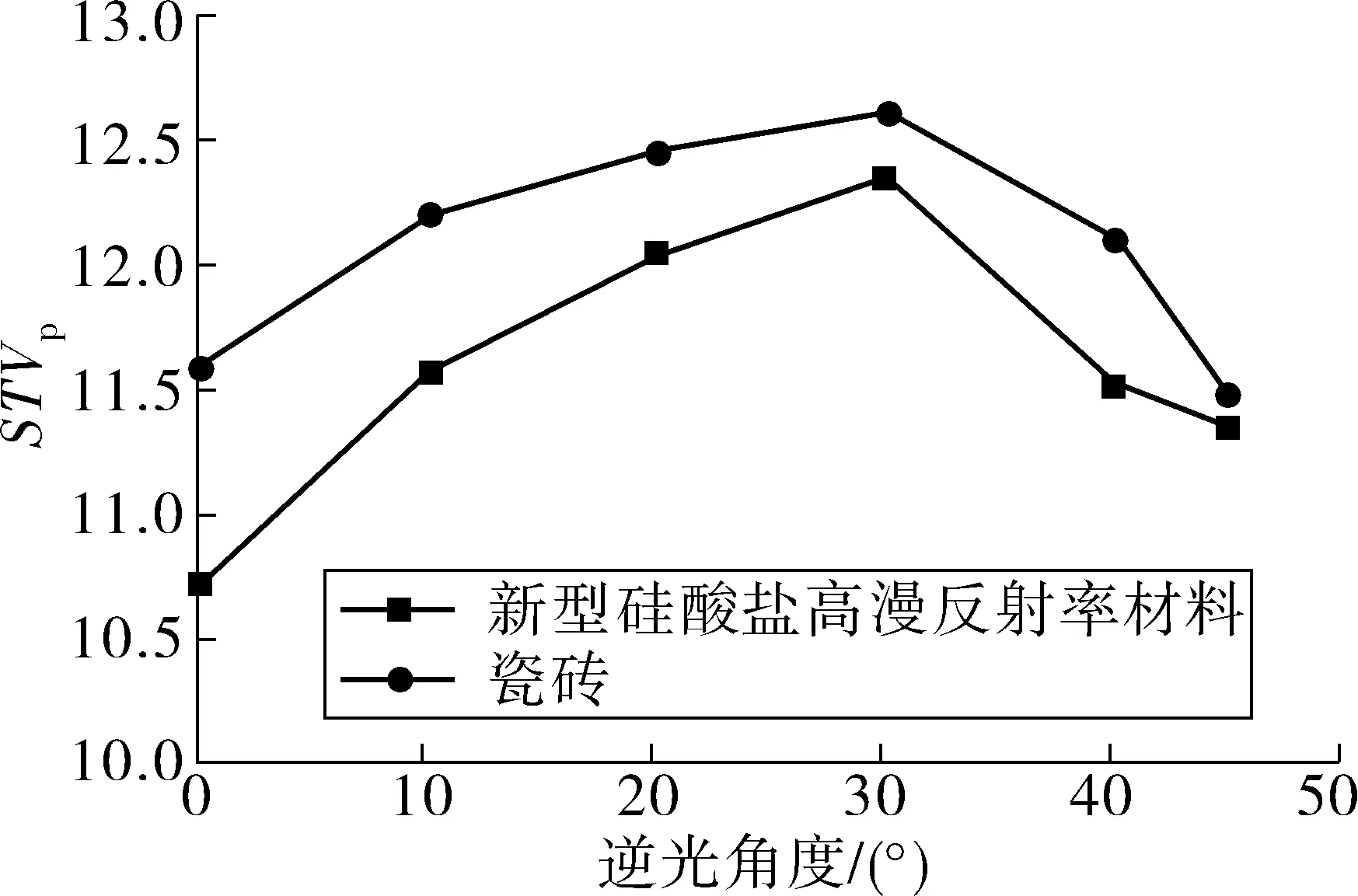
图11 11 m布灯间距周边视觉下测点的STVp值Fig. 11 STVp value of measuring point under the peripheral vision with lamp distance of 11 m
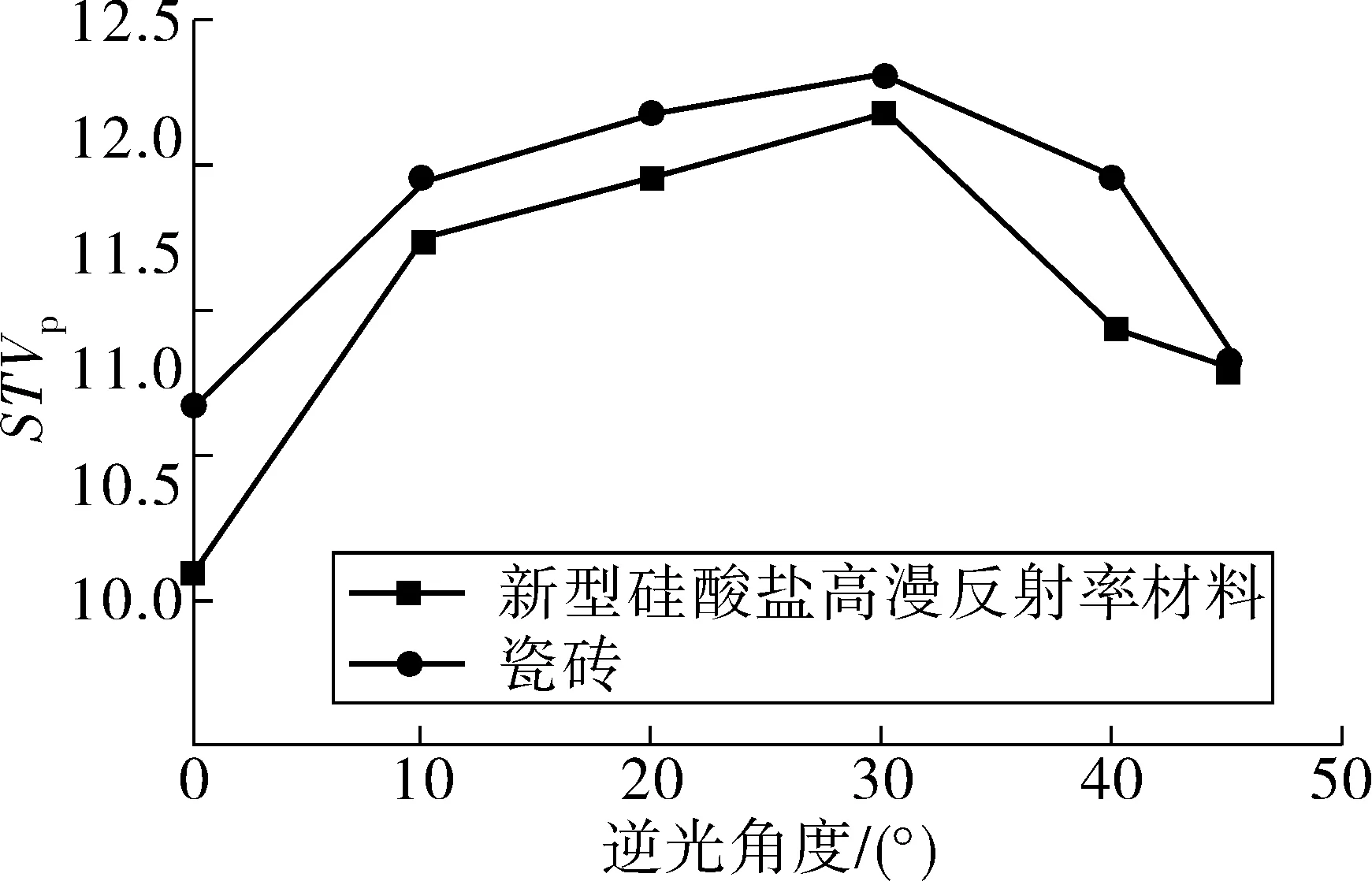
图12 12 m布灯间距周边视觉下测点的STVp值Fig. 12 STVp value of measuring point under the peripheral vision with lamp distance of 12 m
由表3可以看出,随着布灯间距的增大,周边视觉下测点的STVp值呈现逐渐降低的趋势,布灯间距为9 m时STVp值最大。究其原因,中央布灯时光线集中在隧道中央,隧道两侧的背景亮度和对比度都较低。增大布灯间距使路面两侧的背景亮度继续减小,对比度进一步下降,因此可见度水平逐渐减小。周边视觉与中央视觉一样,由于人眼对比度的感知特点,瓷砖侧壁比高漫反射率侧壁下的STVp值略大。
由图9~图12可以看出,随着逆光布灯角度的增大,STVp值同样出现先增后减的变化趋势,逆光角度为30°时最大,此时周边视觉下的小目标可见度最高,驾驶员更易察觉周边视觉下路面两侧的物体,有利于行车安全。
2.3.3STVf值和STVp值的关系分析
由以上分析可以看出,中央布灯逆光角度30°时,中央视觉和周边视觉下测点的小目标可见度都最大,隧道内的照明质量最好,驾驶员更容易发现视野范围内的障碍物,有利于行车安全。因此在隧道照明设计中,采用逆光照明30°能提供最好的行车视看环境。
中央视觉下的STVf值随着布灯间距的增大呈现出先增后减的趋势。适当增大布灯间距,能使中央视觉范围内的测点获得最大的可见度,同时实现隧道的节能照明,对指导隧道布灯参数设计具有重要的意义。但周边视觉下的STVp值随着布灯间距的增大而逐渐降低。周边视觉对发现横穿马路的行人和前方变道的车辆等具有重要的作用,因此为了保证行车安全只能减小布灯间距,不利于隧道照明的节能运营。所以为了保证隧道内整个视觉范围的照明质量,不能简单地通过改变布灯间距来达到安全和节能的目的。
由表2和表3可以看出,由于中央视觉对应的中央窝分辨能力更强,在中央布灯照明下,中央视觉下测点的STVf值比周边视觉下的STVp值高。采用蝙蝠翼形光强配光曲线灯具,提高周边视觉下的亮度和对比度,改善隧道照明质量的“木桶效应”,对提升隧道内的整体照明质量具有重要意义。
2.3.4STV值修正模型
通过以上数据分析可以看出,在中央布灯情况下,道路两侧的视看条件比行车正前方的视看条件差。周边视觉对应的视网膜分辨能力比中央窝差,驾驶员对周边视觉下的障碍物反应更慢。但与中央视觉一样,周边视觉对发现两侧的目标具有重要的作用。现行计算可见度水平的方法中,只考虑了不同视觉范围的物理视角对可见度的影响,按照等权重的方法,对视觉范围内所有测点的可见度水平加权计算ARWVL,得到最后的STV值,这样会夸大周边视觉下的视看条件,带来潜在的安全隐患。因此计算STV值时,应该对中央视觉和周边视觉分辨能力的差异性进行修正,并赋予STVf和STVp不同的权重,从而得到更合理的STV值。笔者提出STV值的修正模型如下。
中央视觉下的STVf值:
RWVL=10-0.1×|VL|
(6)
STVf=-10×lg (ARWVLf)
周边视觉下的STVp值:
RWVL=10-0.1×|VL|
(7)
STVp=-10×lg(ARWVLp)
隧道内照明质量评价指标STV值:
STV=STVf×m+STVp×n
(8)
式中:k1和k2分别为考虑人眼中央视觉和周边视觉分辨能力差异性的修正系数;m和n分别为中央视觉和周边视觉下的STV值权重系数,m+n=1。
在该修正模型中,通过式(6)和式(7)计算中央视觉下的STVf值和周边视觉下的STVp值,再利用式(8)计算整个路面的STV值,从而更合理地评价隧道照明质量。虽然提出了STV值的修正计算模型,但针对不同的布灯方式,如何确定修正系数和权重的具体值将是下一步的研究重点。
3 结 论
通过室内模型实验,考虑了人眼分辨能力的特点,研究了逆光照明参数对不同视觉范围内测点的小目标可见度的影响规律,得到以下主要结论:
1)中央逆光布灯角度30°时中央视觉和周边视觉下测点的小目标可见度都最大,能够提供最好的可见度水平,最有利于行车安全。
2)随着布灯间距增大,中央视觉下的STVf值先增后减,在11 m的布灯间距取得最大值;周边视觉下的STVp值逐渐减小,因此不能简单地通过改变布灯间距来达到安全和节能的目的。
3)逆光照明下,高漫反射率侧壁材料比瓷砖侧壁材料下的小目标可见度略低,但仍能保证良好的视看环境,同时起到一定的节能照明作用。
4)中央视觉下的视看环境比周边视觉好,提高隧道两侧的可见度水平对提高隧道内的整体照明质量具有重要的意义。
提出了STV值的修正计算模型,该模型考虑了可见度水平修正系数和不同视觉范围的影响权重,为隧道照明质量的精准评价和合理设计提供了参考。
