一种智能停车场管理系统的设计
2019-07-01刘志成
张 健,刘志成
(太原工业学院,山西 太原 030008)
0 引言
随着近几年经济的不断发展,人民生活水平也逐渐得到提高,汽车使用率的不断上升给人们的日常工作和生活带来了很多便利,但是停车难的问题也随之产生,由于绝大部分中小型停车场依旧采用人工方式维持运行,这就使得停车场运行效率低、人工成本高[1]。
以某小区的中小型停车场为背景,设计一种智能停车场管理系统,可以实现智能开关门闸、门口车位提示、停车场内空闲车位指示等功能,使停车场管理系统在现有基础上,经济性、安全性和使用效率得到提高,真正实现停车场车辆的全自动化、无人化、简单化管理。
1 系统整体方案的设计
本设计以STM32F103单片机为信号分析处理核心,设计出一套低成本、安全可靠的智能化停车场管理系统。系统主要由STM32F103控制器和外部的电源模块、通信模块、传感器模块、显示模块、道闸控制模块组成。系统框图如图1所示。
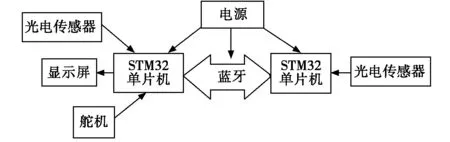
图1 系统总框图
2 系统硬件设计
2.1 核心控制器
STM32F103单片机采用了比较先进的ARM微型控制器(32位),一共有十个定时器,包括两个高级定时器、四个一般定时器、两个基本定时器,两个看门狗定时器,其中的四个一般定时器和一百多个高效的I/O端口足够本系统使用。另外,STM32F103集成化程度非常高,功率消耗很低,编程上可采用库函数编程方法,大大降低编程难度。
2.2 光电传感器
光电传感器是由一个发射探头和一个接收探头构成的检测装置,又称光转电接近开关,它是利用被检测物体对发射探头发出光线的反射或者遮挡,由同步回路接通电路来检测物体是否存在[2]。其工作原理如图2所示。
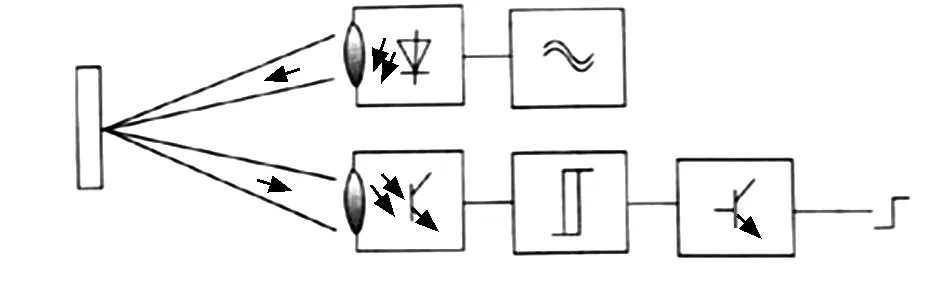
图2 光电传感器工作原理简图
本系统采用E18-D70NK反射式红外光电开关来检测车辆。E18-D70NK额定工作电压为5 V,检测范围为15 cm~600 cm,信号发生时间低于3 ms,能够在-15℃~50℃的温度范围内正常工作。当有车辆在检测区域出现时,传感器将产生一个高电平信号通过输出端送至单片机的IO口,单片机按照相应的程序设计分析后产生控制信号。
2.3 舵机
舵机的硬件电路主要由直流电机、电位器、调制芯片、控制电路组成。内部电路如图3所示[3]。
控制舵机工作的信号通过接收机进入调制芯片,来获取所需的直流偏置电压。在舵机内部有一个可以产生周期为20 ms,宽度为1.5 ms的基准信号,将直流偏置电压与此基准电压进行比较,产生电压差输入到电机的正负极,电机的转速趋于稳定时,通过内部的减速齿轮带动的定位器调整电位差使其为零,舵机动作完成。

图3 舵机内部硬件电路图
2.4 LCD显示屏
液晶显示屏(LCD)是广泛用于各种显示场所的一类显示器。LCD在显示时采用了两片极化材料,在两者之间是液体状的水晶溶液,在有电流通过时液体会重新进行排列,使光线通过从而达到显示的目的。
2.5 HC-05L蓝牙模块
HC-05是以蓝牙无线技术标准为基础的一种用于短距离数据交换的模块,主要用于单片机之间的短距离无线通信(使用2.3-2.485GHz的ISH范围内的标准无线电波)[4]。最初是由爱立信集团于1994年创立,作为RS232数据通信的一种替代方案,可以同时连接多个设备,解决了多模块数据同步的难题。
2.6 系统总体电路
系统的总体电路如图4所示。系统以STM32F103单片机为控制核心,用到三个32单片机。每个单片机有自己的电源模块和通信模块,组成独立的系统。每个系统有自己特殊的功能,以控制道闸为主要功能的是1号系统、以停车场内部车位检测为主要功能是2号系统、以入口智能显示为主要功能是3号系统。各系统之间通过蓝牙通讯模块进行数据交换。

图4 系统总体电路图
3 系统软件设计
本文采用了模块化编程的思想进行相应的程序设计,将整个系统的软件设计分成了以下几个模块:道闸自动控制程序,停车场内部车位信息检测程序,串口通讯程序,入口显示屏显示程序等。系统主程序运行流程图如图5所示。三个最小系统中主程序的执行以二号系统为基础,二号系统通过对内部车位信息检测产生的数据直接决定着其他各个系统是否动作。二号系统的单片机将车位信息以二进制数的形式通过串口发送,此时一号和三号单片机仍处于等待状态,当一号和三号系统接收到串口中断信息后读取相关数据开始执行主程序。整个程序运行周期以二号单片机进入主程序为开始标志,以一号和三号单片机控制端开始动作为一个运行周期结束的标志。

图5 系统主程序流程图
4 系统组装与调试
4.1 道闸控制系统调试
在系统硬件电路搭建及软件设计完成的基础上,设计道闸控制系统,并搭建在由亚克力板材组成的道闸门框架上来进行实际测试。在道闸框架搭建好后就可以将舵机、传感器、控制模块、电源模块等硬件进行安装,然后进行上电调试。
4.2 车位信息检测系统调试
本系统的调试需要建立在相应模型框架基础上进行验证,通过模型模拟出停车场内的基本情况,并将硬件系统安装到模型上进行基本功能的实现,从而检测是否符合设计要求。即在停车场模型的基础上,在相应位置安装传感器和控制系统,安装完成后进行上电实验,通过不断调试修改参数使其达到设计要求。
4.3 测试结果
系统搭建完成后通过对各模块部件检查后,即可模拟停车场日常工作情况对系统进行测试。上电运行效果图如图6所示。
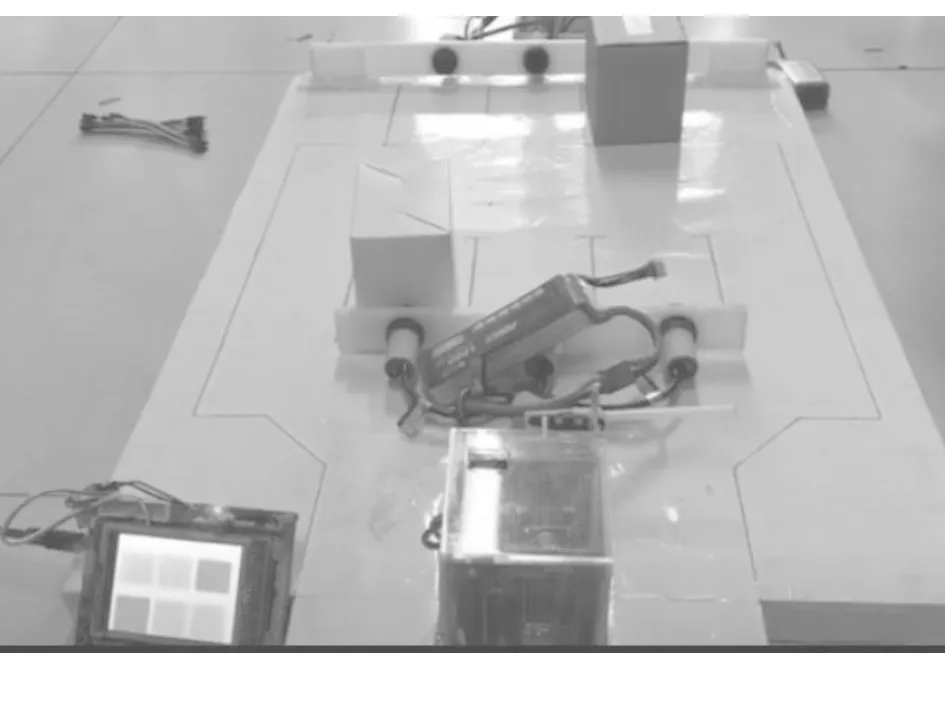
图6 系统实物图
5 结语
基于部分中小型停车场只是简单的通过人为控制道闸开关来管理停车场,运行效率低的缺陷,本文设计了一种基于单片机的智能停车场管理系统,采用模块化设计方法,通过对道闸控制模块、停车场内部车位检测系统、LCD显示模块的设计,实现道闸的自动开关,各车位使用情况的实时显示等功能,通过系统组装调试及实物模拟验证,效果良好。
