多体复杂系统力学载荷识别方法
2019-07-01武江凯苟仲秋白明生韩增尧
武江凯,苟仲秋,赵 晨,白明生,韩增尧
(1.哈尔滨工业大学 航天学院,哈尔滨 150001;2.中国空间技术研究院 载人航天总体部; 3.中国空间技术研究院:北京 100094)
0 引言
航天器随运载火箭发射过程中经受复杂和严酷的力学环境,包括起飞和跨声速期间由压力脉动引起的噪声、跨声速抖振,火箭发动机点火、关机和级间分离产生的瞬态振动,由火工装置或其他分离装置产生的爆炸冲击,POGO(纵向耦合振动)低频振动环境,以及整流罩处气动噪声通过结构传递的高频随机振动环境等。为保证发射期间航天器正常工作,通常会利用载荷条件,并通过仿真预示和试验方法,验证系统抗力学设计;受结构复杂、测量条件和位置不确定性等条件制约,现阶段无法对所有作用于组合体结构的外载荷特别是冲击载荷直接进行测量并下行,因此利用间接反演技术,通过遥测的结构动态响应数据和结构动态特性,对结构经受的各种载荷进行识别,作为直接测量的补充手段,具有重要的工程意义[1]。
动态载荷识别技术从20世纪70年代末逐渐进入研究人员的视野[2-3],目前识别理论和方法包括频域法和时域法,其中频域法具有研究早、发展成熟且识别精度高的特点,但其在结构固有频率处出现求解方程病态,且在对采集的响应信号进行傅里叶变换时对数据长度有一定的要求,因此,该方法只适用于稳态载荷或随机载荷识别。典型的频域识别法包括频响函数矩阵求逆法、模态坐标变换法、逆虚拟激励法、广义正交多项式法等。时域识别法对各类载荷都有较强的适应性,且一般都基于时间步长内待识别载荷为线性函数、一阶阶跃载荷等假设或基于Wilson-θ算法,通过递推的格式在时域内反演待识别载荷。较典型的时域识别法包括反卷积法、计权加速度法、函数逼近法、卡尔曼滤波器和递归最小二乘法、逆系统法以及新兴的智能方法等[4-7]。由于时域识别法不涉及傅里叶变换,识别精度不受采集方法的影响,适用于正弦、随机和冲击等多种载荷的识别,因此越来越受到研究者的重视。
本文以工程中运载火箭和卫星载荷组合体在发射过程中的力学载荷识别问题为研究对象,以二次多项式为基函数,在单自由度振动系统载荷识别方法研究基础上,基于Duhamel积分和模态分解技术,建立多自由度振动系统载荷识别模型,完成多自由度多点激励、多点测试工况下的识别仿真与比较。最后分析采样步长对识别精度的影响,以期为后续工程应用提供理论基础和技术支撑。
1 多自由度振动系统模态分解
运载火箭和卫星载荷组合体发射过程中力学载荷识别问题为一个复杂多体振动系统动态载荷识别问题,因此,拟在利用Duhamel积分和二次多项式完成单自由度振动系统载荷识别方法研究的基础上,利用模态分解技术将复杂多自由度系统分解为多个单自由度系统,从而建立多自由度振动系统载荷识别方法。
典型多自由度振动系统的动力学微分方程为

式中:M、C、K分别为振动系统的质量、阻尼和刚度矩阵;分别为位移、速度和加速度响应矢量;F为待识别的激励函数矢量;n为系统自由度。令为关于质量矩阵归一化的m阶振型矩阵,并假定阻尼矩阵为结构比例阻尼矩阵,根据振型叠加原理,结构动位移响应为

其中ρ为模态响应矢量。将式(2)代入式(1),根据振型正交性原理,可得m个广义坐标系下的解耦方程(m≤n),其中第l个方程为

式中:ξl、ωl分别为第l阶模态对应的阻尼比和自振圆频率;φk,l为 的第k行、l列元素;为Φ转置矩阵的第l行。方程(3)为典型单自由度振动系统方程,本文采取文献[8]中的单自由度载荷识别方法进行求解。
2 多自由度振动系统载荷识别
广义坐标系下的动态响应无法直接测量,因此在模态速度响应矢量和模态位移响应矢量前分别乘,同时令

得到可直接测量的物理坐标系下ti时刻位移动态响应
经以上转换,将计算输入量全部变换为物理坐标下的可测量值,用于反演问题分析。


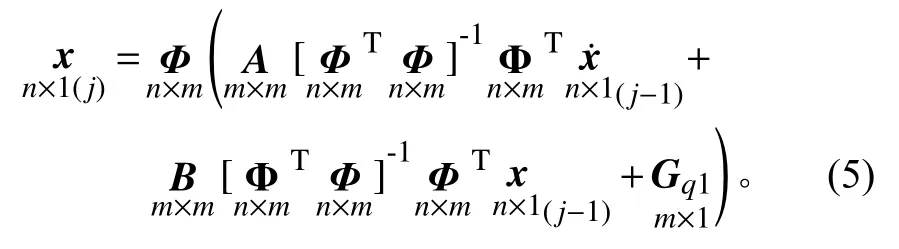
然后,基于单自由度载荷识别及模态叠加原理,即可建立多自由度振动系统动态载荷识别模型[8]

从以上分析和推演过程来看,动态载荷识别仅在[tj-1,tj+1]时段内进行,在tj以前的初始条件和动态载荷的效应均被tj时刻的响应包含,而不必使用此前识别出的动态载荷数据;同样,当前所识别出的动态载荷也不必用于在此后的动态载荷识别。由此可见,本文提出的方法在满足其他动态载荷识别方法中对初始值的灵敏度要求的同时克服了误差积累问题。
3 算例仿真与比较分析
基于以上所研究的力学载荷识别理论和多自由度振动系统的动力学微分方程(式(1)),以文献[9]五自由度振动系统(参见图1)作为算例,对多点激励、多点测试情况进行仿真验证,并对本文方法和文献[9]的计算结果进行比较分析。
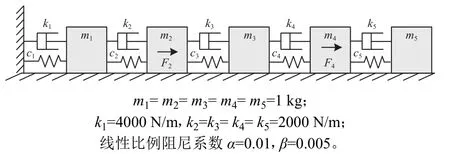
图1 五自由度振动系统Fig.1 A five-degree-of-freedom vibration system
分别在图1所示五自由度振动系统中的集中质量块m2和m4处加载模拟冲击载荷F2和F4,其中F2=100te-3t、F4=200te-2t,加载时间 10 s,采样间隔0.2 s,并且选择与文献[9]相同的随机测量噪声加载方式,即

式中:yNoise为 带噪声的测量响应信号;ye为真实的计算响应信号;delt是信号噪声水平,取1%;nl是响应测量信号的长度;Noise是数据长度为nl、均值为0、偏差为1的随机矢量。
采用本文方法并参考文献[9],在计算步长为0.2 s的条件下,利用集中质量块m1、m3和m5处的响应对F2和F4这2个加载载荷进行反演识别,识别载荷和原始载荷的对比如图2所示。可以看出,本文方法能够得到很理想的识别结果,且系统识别结果对初值不敏感——初值识别误差不会对后期的识别结果造成较大影响,无误差积累传递——3 s后的识别误差明显减小。
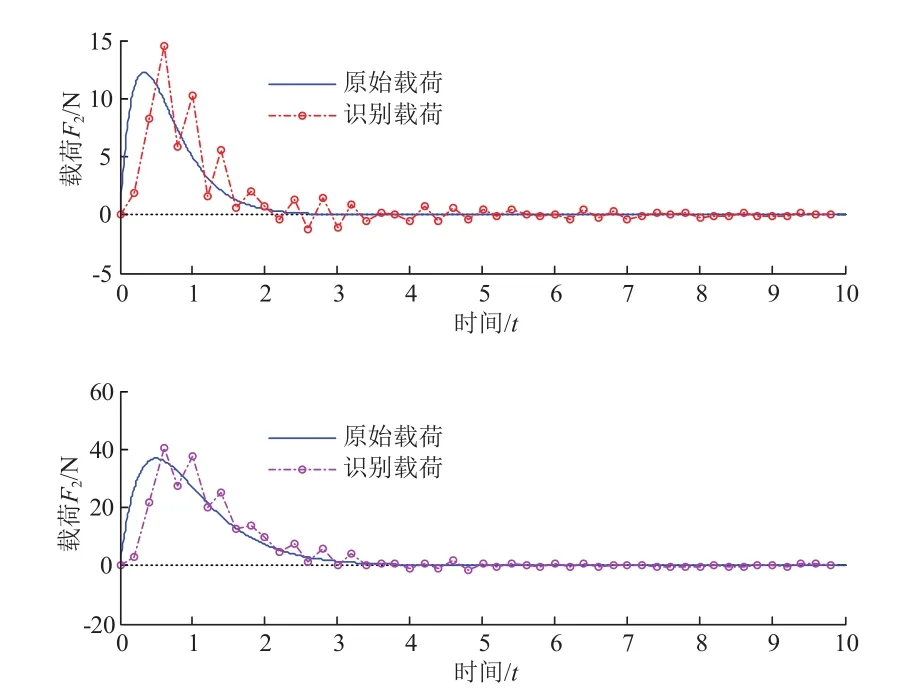
图2 0.2 s 计算步长下的载荷识别曲线Fig.2 The original load and the identified load with a time step of 0.2 s
与文献[9]的计算结果进行比较可知,在起始时刻,本文方法的载荷识别误差虽小于精细积分法的,但大于 TVSD(Truncated Singular Value Decomposition)正则化后精细积分法的结果,这主要是由于所取计算步长较大,而本文方法二次多项式中含有步长平方项所致。为此,在相同噪声水平下,取计算步长分别为 0.1 s和 0.01 s,再进行载荷识别,结果如图3和图4所示。可以看出,随着计算步长的减小,载荷识别误差逐渐减小。

图3 0.1 s计算步长下的载荷识别曲线Fig.3 The original load and the identified load with a time step of 0.1 s
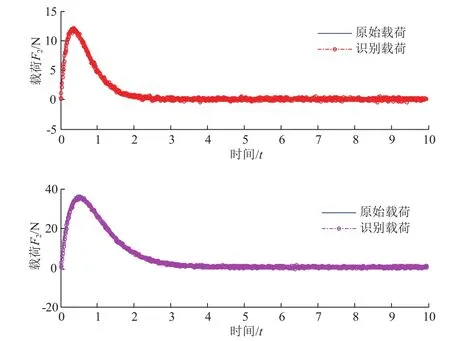
图4 0.01 s 计算步长下的载荷识别曲线Fig.4 The original load and the identified load with a time step of 0.01 s
4 结束语
本文针对运载火箭和卫星组合体发射过程中的载荷识别问题,以二次多项式为基函数,基于Duhamel积分和模态分解技术推导建立了多自由度振动系统载荷识别模型。经多自由度振动系统多点激励、多点测试工况的载荷识别与比较验证,该模型具有很高的识别精度,且不存在误差传递和积累问题,对测量噪声具有较好的鲁棒性。
本文所用的动态载荷识别方法对于解决多自由度振动系统载荷识别问题具有较强的适用性,通过提高采样频率、减小计算步长,可获得更精确的识别结果,为后续解决星箭组合体载荷识别问题提供技术支撑。
