小微型Bell-Hiller机构的无人直升机操纵响应的参数辨识
2019-06-28周斌蒋庆斌邓寅喆田瑞涛
周斌,蒋庆斌,邓寅喆,田瑞涛
小微型Bell-Hiller机构的无人直升机操纵响应的参数辨识
周斌1,蒋庆斌1,邓寅喆2,田瑞涛3
1. 常州机电职业技术学院, 江苏 常州 213164 2. 上海览山电子科技有限公司, 上海 200000 3. 上海代仁智能科技有限公司, 上海 200000
模型研究无人直升机传递函数参数的辨识方法,是设计和验证飞行控制系统算法、仿真和性能估计的基石。本文通过归一法,将传递函数归纳为ARX模型。对采集到的无人直升机同步数据,采用基于ARX模型的递推最小二乘法进行系统辨识,演算出纵向、横向、航向操纵响应的完整参数。
无人机; ARX模型; 传递函数; 参数辨识
小微型无人直升机具有尺寸小,可悬停,灵活度高,成本低等特点,因此在很多领域应用广泛。而大多数小微型直升机采用Bell-Hiller(贝尔-希勒)机构,直升机横向或纵向的操纵除了引起相应通道的运动外,对其余运动的影响很小,因此,可以忽略耦合影响单独操控[1]。小微型无人直升机操控的关键动作是俯仰横滚和转向动作。获得直升机操纵响应传递函数模型,并以此为基础设计控制算法是设计飞行控制系统的基础工作[2]。
1 小微型无人机响应的ARX参数模型
1.1 小微型无人机对纵向俯仰操纵的响应模型

1.2 小微型无人机对横向横滚操纵的响应模型

1.3 无人机对航向操纵的响应模型
与纵向操控和横向操控响应的推导方式相同,航向控制信号到航向角之间的传递函数为:

1.4 无人机操控响应传递函数与ARX模型之间的转换
无人机操控响应的传递函数可以很方便地转化为ARX模型:

在低空低速情况下,经实验验证无人机控制信号到横滚输出舵机的操控机构为一阶惯性环节[3]。因此,控制信号到无人机横滚输出舵机操控机构的传递函数式(2)可以简化为:


2 无人机横滚通道输入和响应及参数辨识结果
机载传感器采集、、711等数据,处理并且记录,该系统包括机载处理器、传感器、无线传输模块、地面处理计算机等,对悬停和匀速前飞状态数据分别采样。
通过MATLAB系统辨识工具箱的参数辨识实现系统辨识计算,由基于LS辨识的ARX函数实现,辨识结果如下:

其输出曲线和辨识结果如图1所示。
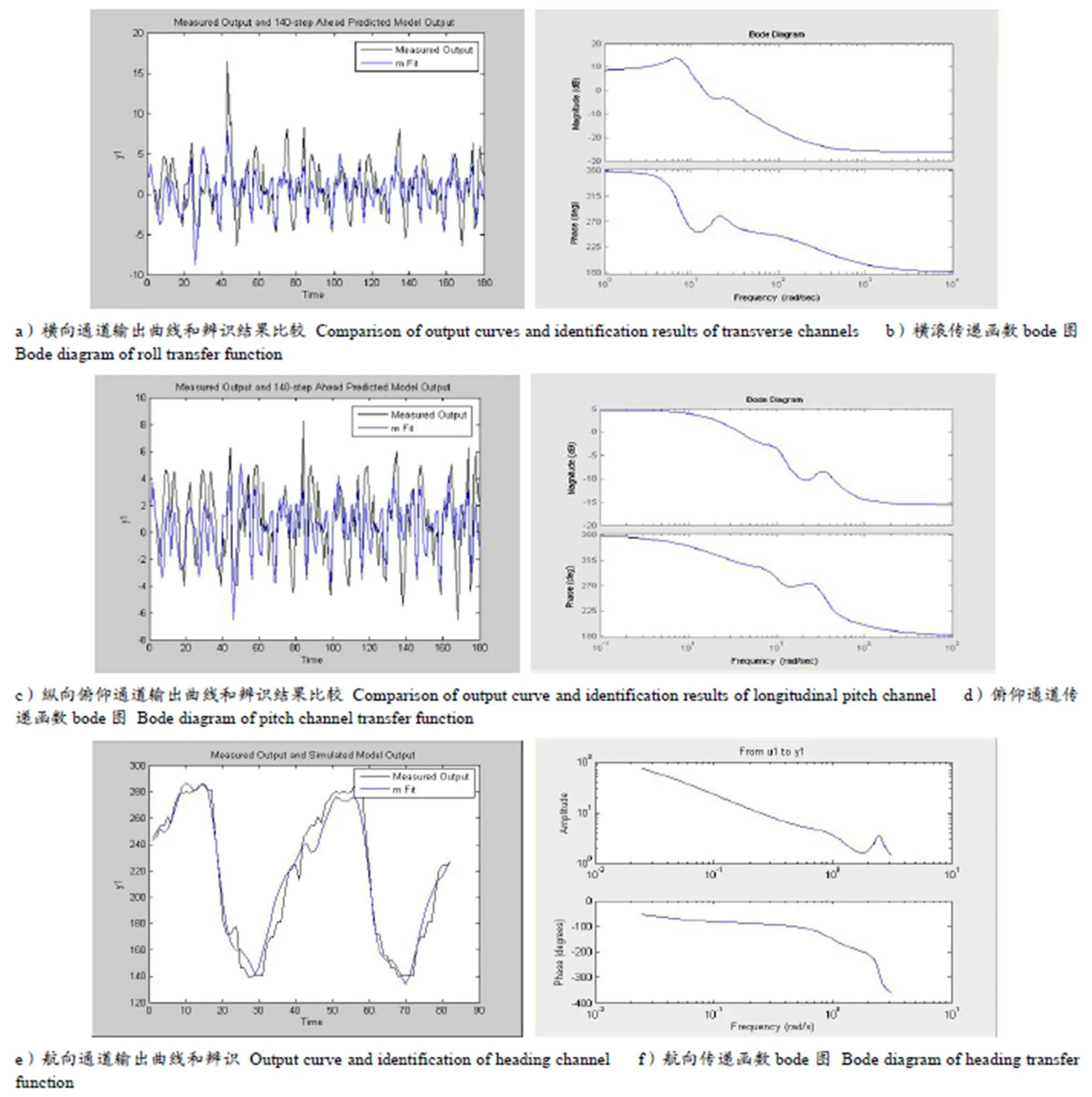
图1 输出曲线和辨识结果比较
3 结论
本论文提出的辨识方法是通过推导无人直升机操纵响应的传递函数,并根据直升机本体的传感器操纵和响应的采集数据,采用基于ARX模型的广义最小二乘法获得具有一定精度辨识结果。后期的研究证明,通过本论文的方法获得的控制模型,为下阶段飞行控制系统的设计提供了良好的基础。
[1] 邓寅喆.超小型无人旋翼机XZ03飞控系统的机械电子学设计研究[D].上海:上海大学,2008:2-3
[2] 蔡艳利.基于滚动时域控制的无人直升机飞行控制研究[D].南京:南京航空航天大学,2009:3-4
[3] 缪丽娟.小型无人直升机悬停与低速段飞行控制律研究[D].南京:南京航空航天大学,2014:6-7
Identification of Maneuvering Response Parameter of Unmanned Helicopter with Small Bell-Hiller Mechanism
ZHOU Bin1, JIANG Qing-bin1, DENG Yin-zhe2, TIAN Rui-tao3
1.213164,2.200000,3.200000,
The identification method of transfer function parameters of unmanned helicopter is the cornerstone of designing and verifying flight control system algorithm, simulation and performance estimation.For the acquired unmanned helicopter synchronization data, the complete parameters of longitudinal control response, lateral control response and course control response were calculated out by the system identification of the recursive least square method based on ARX model in this paper.
Unmanned helicopter; ARX Model; transfer function; parameter identification
V279+.2
A
1000-2324(2019)03-0453-03
10.3969/j.issn.1000-2324.2019.03.021
2018-05-06
2018-07-02
江苏高校‘青蓝工程’资助项目(苏教师[2019]3号)
周斌(1983-),男,本科,讲师,主要从事工业机器人控制技术研究. E-mail:672893358@qq.com
