二维码导航AGV控制系统研究
2019-06-28张艳朱振伟
张艳,朱振伟
二维码导航AGV控制系统研究
张艳,朱振伟
河南机电职业学院 机电工程学院, 河南 新郑 451191
为了提高自动导引车(AGV)的定位精度,实现多个站点精确停靠,本文利用Data matrix二维码的显著特征和预存在二维码中的位置信息对AGV进行导航和定位。鉴于受地面不平和打滑等因素影响AGV在运行过程容易跑偏的问题,采用二步纠偏法在导航方向上对AGV进行纠偏。具体而言,首先采用纯追踪运动模型实现位置纠偏,然后采用于积分分离PID实现角度纠偏。实验证明,采用二维码导航的AGV运行平稳,定位精确。
二维码导航; 纯追踪算法; PID
作为机器人领域最柔性的自动化装配及搬运设备,自动导引车(Automated Guided Vehicle,AGV)越来越受到各行各业的青睐,AGV的核心技术之一是导航技术,常见的导航技术有磁导航技术,激光导航技术,惯性导航技术,视觉导航技术,RFID定位导航等。以上各种导航技术都有各自的优缺点,其中利用二维码技术,将轨迹及位置信息存储在二维码标签中实现AGV的辅助定位和轨迹跟踪[1]。这种导航方式定位精确,铺设、改变路径也较容易,越来越引起人们的关注。
和磁钉导航方式相似[2,3],在AGV移动路径上,每隔一段距离或特定位置处,铺设二维码。AGV在移动过程中,通过车载工业相机扫描到二维码,通过识别当前二维码来确定AGV位置和姿态信息,计算出AGV在航向上的角度误差和位置误差,进而修正AGV的运动路线,以更正确的姿态向下一个二维码行驶。
1 基于DM码导航的AGV的定位算法

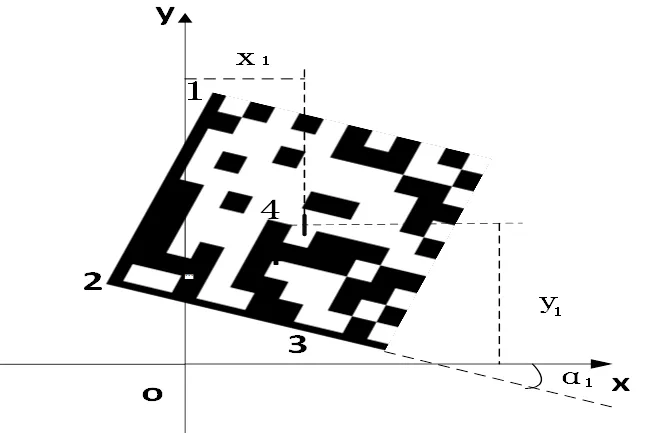
图 1 DM二维码定位示意图
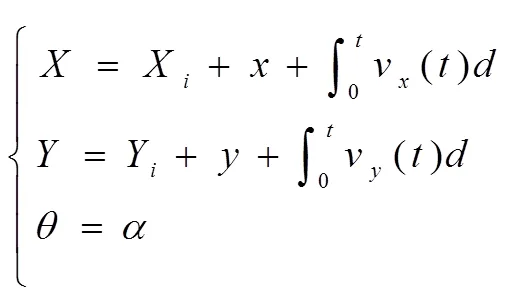
2 AGV的运动控制
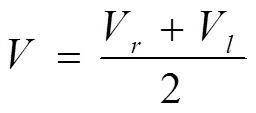
其中为两驱动轮之间的间距。
AGV在运行过程中,只需要控制驱动左、右两轮直流无刷电机的转速就可以实现AGV的直行、转向等动作[8]。但是,由于AGV两个驱动轮的驱动电机静态特性、动态特性不会完全相同,同时在运行过程中又受地面的影响,AGV会产生运行偏差,运行偏差不仅有方向偏差也有位置偏差,为了保证能够停靠到每个站点上,AGV在运行过程中需要纠偏。AGV纠偏算法中常用的PID算法和模糊PID算法[9,10]等控制方法已在有轨AGV控制领域取得了较好的控制效果。但基于二维码导航AGV系统获得AGV完整姿态信息只能在扫描到二维码时瞬时提供,所以上述方法不能完全适用于二维码定位导航[11]。因此,本文提出了二步纠偏法,第一步采用基于纯追踪运动模型纠偏算法进行位置纠偏,第二步,在实现第一步的基础上,采用较好实现的PID控制器来进行AGV航向上的角度纠偏控制。
2.1 纯追踪运动模型控制位置纠偏
位置偏差阶段采用纯追踪模型算法控制。纯追踪模型控制方法原理是一种几何方法,它根据AGV的当前位置A点确定AGV到达目标位置B点所需行驶的一个或多个圆弧[12,13]。本文以位置偏差大于0,角度位置偏差小于0为例来说明纯追踪模型纠偏算法。如图所示,以AGV当前扫描到的二维码中心为原点建立坐标系,A点是AGV当前的位置,AGV的当前位置信息P(1,1,)可以通过相机扫描二维码读出,B点在二维码之间连线上,表示由A、B两点确定的直线的倾斜角。
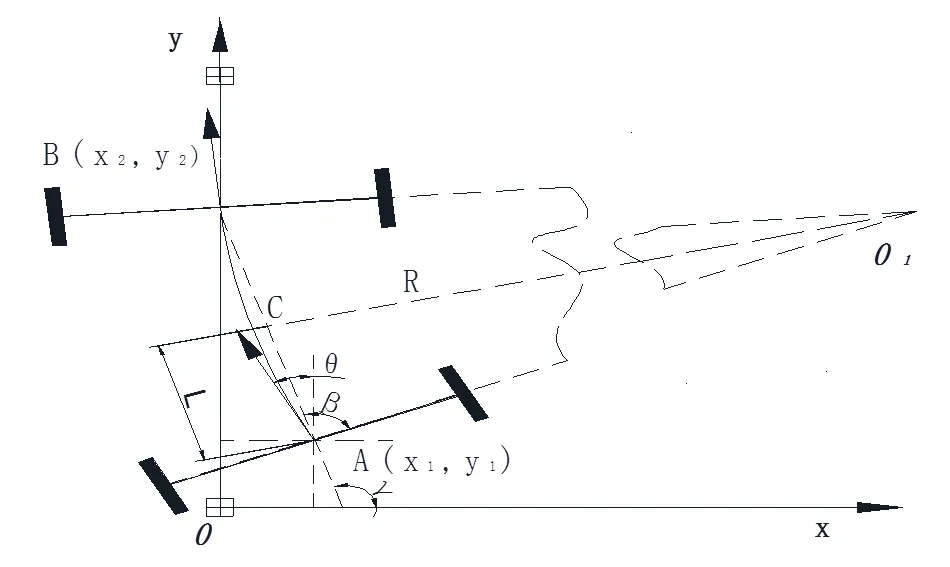
图 2 纯追踪算法位置纠偏
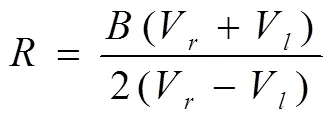
由几何关系可知:
求得:
由式子(3)、(8)可得:
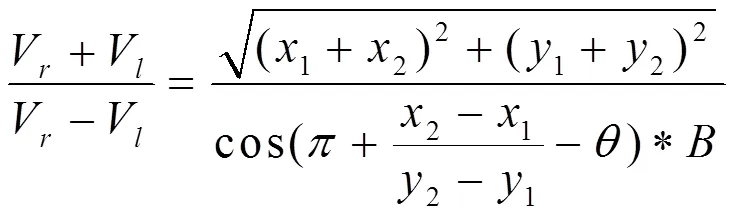
调节当前左、右轮的速度满足式(9)改变当前AGV运行状态可以实现位置纠偏。
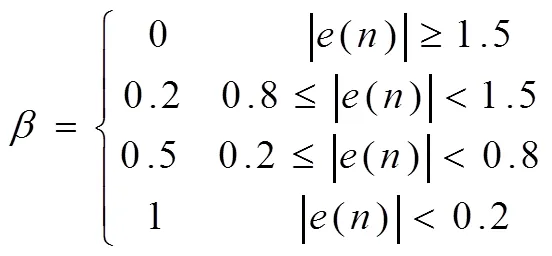
2.2 基于积分分离PID控制角度纠偏
消除位置偏差后,将AGV航向上的角度偏差作为输入,采用积分分离PID控制算法实现角度纠偏。采用积分分离的目的主要是当实际角度偏差和设定的角度偏差比较大时,取消或减弱积分作用,避免由于积分作用使系统超调量增大,产生振荡,系统稳定性降低[14]。当偏差值较小时,通过修改开关系数逐渐引人积分控制,以便消除静差提高控制精度[15]。
积分分离PID控制采用增量式PID,控制算法可以表示为:

式中为积分项的开关系数。
取三个阈值分割点,1.5、0.8、0.2,的取值为:
3 结果及分析
基于二维码导航的AGV样机,如图3所示。该AGV的车体尺寸为0.45 m×0.38 m。两驱动轮对称安装于车体左右两侧,二维码相机安装在两驱动轮中间,为了保证车体平衡,车体后方对称装有一对万向轮。AGV上装有陀螺仪采集角度信息,车载控制器采用自主设计研发的嵌入式控制系统。

图 3 二维码导航AGV样车
实验中,二维码的张贴间距为1000 mm,分别以0.7 m/s、1.0 m/s、1.4 m/s、1.7 m/s、2.0 m/s速度测试,AGV从第一个二维码启动后连续经过6个二维码停止,在运行过程中,车载控制器通过无线Wifi将扫描到的二维码信息实时发送到上位机上。调试成功后,AGV每经过一个二维码的位置信息如表1所示。实验结果表明,AGV运行速度在1~2.5 m/s之间运行平稳,没有出现漏码,跑偏现象。
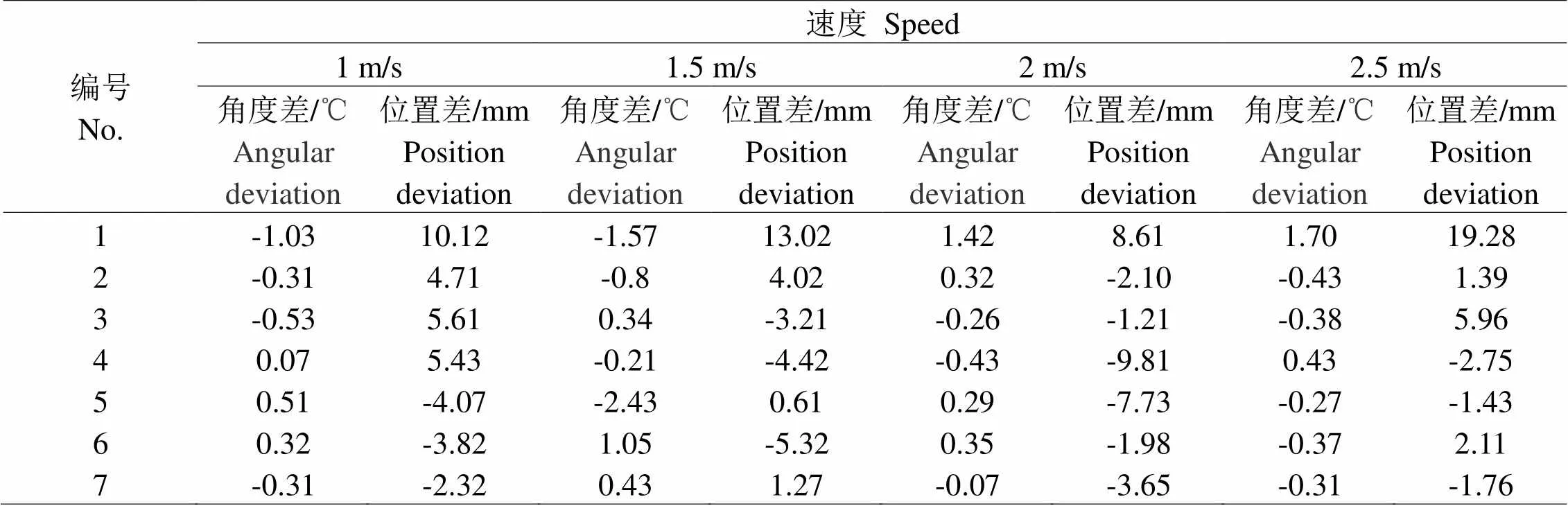
表 1 AGV运行轨迹偏差
4 结论
本文研究了基于DM二维码AGV的导航方式,提出了将位置信息存储到DM码中,利用存储在DM码中的位置信息和DM码显著特征L边进行定位和导航的方法。为了解决受地面不平和打滑等因素影响AGV在运行过程容易跑偏的问题,提出了相应的控制算法,实验证明基于DM二维码导航的AGV,不仅能够实现自主导航,也能实现精确定位,铺设或改变路径也比较容易,因此这种导航方式的AGV在物流行业有很好的的前景。
[1] 于娟.基于QR二维码技术的AGV系统在仓储中的应用设计[J].天津职业技术师范大学学报,2015,25(3):44-47
[2] 季冉鸣,王芳.一种基于磁钉和惯导系统的机器人导航控制算法[J].制造业自动化,2014(4):52-54
[3] 李凤娥.基于磁钉技术的集装箱码头AGV定位精度分析[J].上海海事大学学报,2016,37(1):38-41
[4] 黄翀,郑河荣,潘翔.局部特征自适应的DM二维码结构提取方法[J].计算机科学,2014,41(b11):95-99
[5] 罗高,袁亮.基于二维码的单目视觉测距移动机器人定位研究[J].组合机床与自动化加工技术,2017(10):114-117
[6] 赵晨宇,陈息坤.差速转向农业专用AGV小车的设计与模糊控制研究[J].农机化研究,2016(11):123-127
[7] 许伦辉,刘景柠,朱群强,等.自动引导车路径偏差的控制研究[J].广西师范大学学报:自然科学版,2015,33(1):1-6
[8] 张经天,庄植均,李忠明,等.视觉导引AGV分段预测控制模型设计[J].北京邮电大学学报,2014,37(4):15-19
[9] Kodagoda KRS, Wijesoma WS, Teoh EK. Fuzzy speed and steering control of an AGV[J]. IEEE Transactions on Control Systems Technology, 2002,10(1):112-120
[10] 冯锋,邓志良,赵旭.AGV自动导航小车自组织模糊控制器研究[J].微计算机信息,2008,24(10):84-86
[11] 罗哉,唐颖奇,李冬,等.基于最优偏差路径的自动导引车纠偏方法[J].仪器仪表学报,2017,38(4):853-860
[12] 陈宁,周志峰,王永泉,等.一种纯追踪模型改进算法[J].轻工机械,2014,32(4):69-72,76
[13] 汪小旵,鲁伟,陈满,等.基于改进纯追踪模型的温室采摘运输自动跟随系统[J].农业机械学报,2016,47(12):8-13
[14] 罗海波.PID控制器设计与仿真研究[J].计算机仿真,2012,29(2):345-348
[15] 罗哉,刘慧平,胡晓峰,等.视觉导引AGV纠偏算法研究[J].计算机仿真,2016,33(1):373-377
Study on AGV Control System with Two-dimensional Code Navigation
ZHANG Yan, ZHU Zhen-wei
451191,
In order to improve the positioning accuracy of the AGV and achieve accurate docking at multiple sites, in this paper, two-dimension code with Data matrix and prestored position information had been applied in navigation and location.Two step correction method was applied in correcting the directions of AGV in view of uneven ground and skidding during AGV running. Specifically speaking, Firstly, the pure pursuit model is used to correct positional deviation, and then the integral separation PID is used to correct angle deviation. Test showed that the AGV based on two-dimensional code navigation ran smoothly and the positioning was accurate.
Two-dimensional code navigation;algorithm of pure pursuit; PID
V448.133
A
1000-2324(2019)03-0441-04
10.3969/j.issn.1000-2324.2019.03.018
2018-04-03
2018-05-26
张艳(1972-),女,硕士,副教授,研究方向机电一体化技术. E-mail:zy-mwx@126.com