HM 2000型剖面浮标的主要特征及其应用
2019-06-28王徳亮刘增宏张素伟卢少磊许建平
沈 锐,王徳亮,刘增宏,张素伟,卢少磊,许建平
(1.中国船舶重工集团有限公司第七一○研究所,湖北宜昌443003;2.卫星海洋环境动力学国家重点实验室,浙江杭州310012;3.自然资源部第二海洋研究所,浙江杭州310012)
0 引言
2000年启动的国际Argo计划,在美国、日本、法国、英国、德国、澳大利亚、印度和中国等30多个国家和团体的共同努力下,已于2007年10月在全球无冰覆盖的开阔大洋中建成一个由3 000多个自动剖面浮标组成的实时海洋观测网(简称“核心Argo”),用来监测上层海洋内的海水温度、盐度和海流,帮助人类应对全球气候变化,提高防灾抗灾能力,准确预测诸如发生在太平洋的台风和厄尔尼诺等极端天气/海洋事件等[1-4]。
据国际Argo信息中心最近的一份统计表明:截止2018年8月,全球Argo实时海洋观测网中活跃浮标的数量已经达到了3 951个,分别由世界上多个国家的浮标生产商提供的约20个型号的自动剖面浮标所做出的贡献。这些浮标利用了3种类型的通讯卫星(IRIDIUM、ARGOS/ARGOS3、BEIDOU)传输观测数据,其中美国的APEX型浮标有1 563个,占总数的39.56%;法国的 ARVOR型615个,占15.37%;美国的 SOLO-Ⅱ型 489个,占12.38%;中国的HM 2000型仅有10个,占0.25%。为全球Argo实时海洋观测网传输浮标观测数据的3种通讯卫星中,利用IRIDIUM卫星的浮标数量有2 650个,占67.07%;利用 ARGOS卫星的有1 291个,占32.68%;利用我国BEIDOU卫星的仅有10个,占0.25%。由此可见,中国的HM 2000型剖面浮标和BEIDOU卫星在全球Argo实时海洋观测网中的占比显得微乎其微。除了与我国对深海型(≥2 000 m)自动剖面浮标的研制较晚、重视不够外,还与国内浮标研制单位不多、宣传力度不够,以及国内用户对利用国产海洋观测仪器设备的信心不足等都有一定的关系,从而影响了国产剖面浮标的大规模推广应用。
本文拟在详细介绍HM 2000型剖面浮标的工作原理、结构和主要技术指标等的基础上,与APEX型浮标进行简要比较分析,着重体现HM 2000型浮标的功能优势,以及其在南海Argo区域海洋观测网建设中的业务应用。
1 HM2000型剖面浮标特点与性能
HM 2000型剖面浮标是一种新颖的国产海洋观测仪器设备,其利用了我国北斗卫星导航系统提供的精确定位和双向通讯功能,可以长期(约2-3年)在海上自由漂移并连续测量0~2 000m水深内的海水温、盐度剖面数据。
1.1 浮标工作原理及其主要结构
1)工作原理。
HM 2000型剖面浮标投放入海后,可以根据预先设定的参数,自动完成下潜—定深漂移—继续下潜至最大测量深度—上浮测量—水面定位通信—下潜进入下一个剖面观测的循环工作过程(图1)。

图1 HM 2000型剖面浮标工作流程Fig.1 Workflow of HM 2000 profile float
剖面浮标的工作原理:浮标按照设定的参数进入剖面测量工作状态,驱动浮力调节模块将外油囊中的液压油泵入缸体内,浮标下潜,待到达设定深度后进入漂浮状态;当接近设定的剖面测量时间时,浮标结束休眠并下潜至设定的最大测量深度处,随即浮力调节模块再次驱动,将缸体内的液压油抽回到外油囊中,浮标开始逐渐上浮,上浮过程中采集每一观测层上的海水温度、盐度和深度数据;当浮标抵达水面后,自动打开通信模块,通过卫星向地面控制中心传送该浮标收集的全部采样信息及测量的温、盐、深度剖面数据等。
2)浮标结构。
HM 2000型剖面浮标外形及内部结构如图2所示。由图2可见,该型浮标结构上主要由天线、CTD传感器、姿态稳定盘、北斗通信模块、控制模块、液压驱动装置、主壳体、电池组和油气囊等组成。
按功能划分,HM 2000型剖面浮标主要由壳体模块、驱动系统、传感器、控制模块和通信模块等5个部分组成。
①壳体模块。HM 2000型浮标原创性地采用非金属壳体作为承压外壳,承载压力完全能够满足深度要求。与国内外其它浮标金属壳体相比,非金属壳体具有重量轻、负载能力大(相同体积尺寸)、防生物附着、成本低、生产效率高等优点,便于大规模生产。
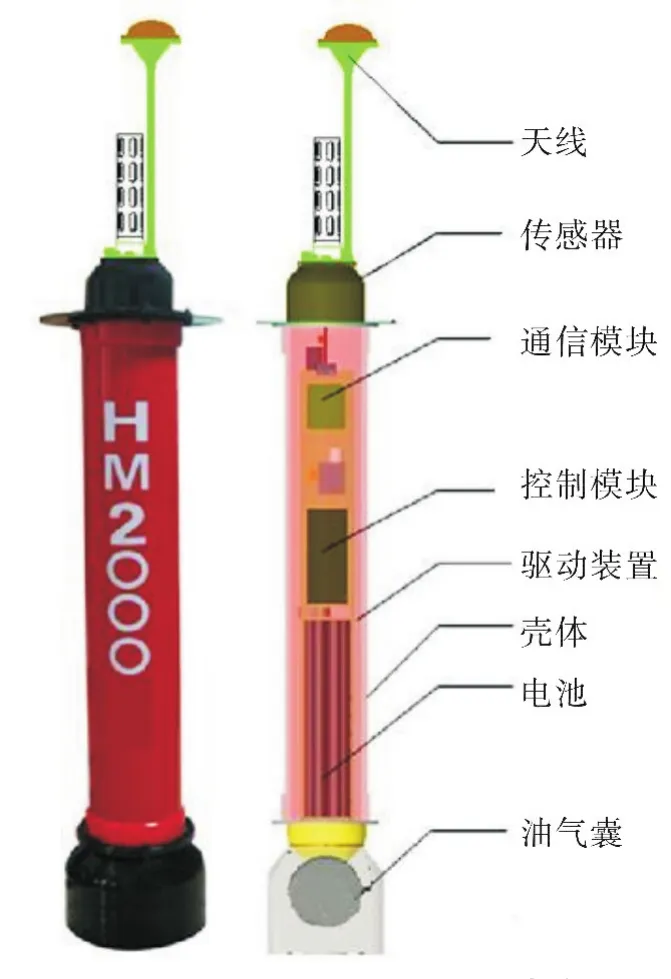
图2 HM 2000型浮标外形及内部结构Fig.2 Appearance and internal structure of HM 2000 float
②驱动系统(沉浮调节模块)。HM 2000型浮标的驱动系统采用了往复式液压驱动装置,通过主控模块特定的软件算法能够精确地控制液压油在外油囊和液压缸之间流动,从而改变浮标自身的体积,最终实现浮标在水下深度的精确控制。所以,该模块主要由液压驱动装置(直流电机、导轨、丝杆、活塞体、液压缸体等)(图3)和压力传感器、油气囊组件组成。
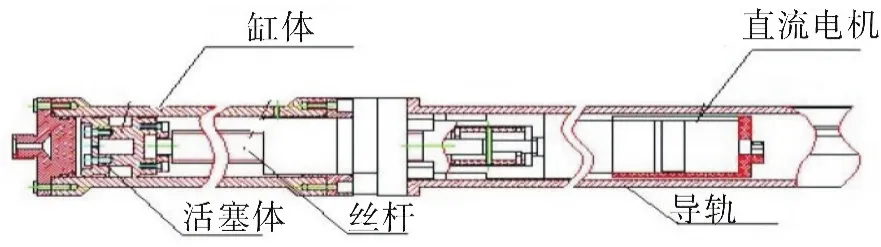
图3 液压驱动装置结构Fig.3 Structure of hydraulic driving device
浮标沉浮调节模块采用了各种方法保证浮标能可靠、高效、长时间工作。与液压油接触的各元件均采用了专用的密封件,保证在油囊受到2 000 m外压时油囊和缸体里的液压油不会外泄,浮标能长时间停留在指定的深度。高品质的直流电机、丝杆和各种精密加工可靠性高,摩擦力小,能保证升降装置耗电较小,延长浮标的寿命,提高浮标的可靠性。专用的结构设计和转速测量设计,实现油量(浮标体积)的精确控制,保证浮标停留在指定深度上。
油气囊组件是改变浮标浮力的关键部件之一,与液压驱动装置连接组成浮力调节模块。油气囊组件主要由油囊组件、气囊组件、接头体等组成,油气囊组件靠螺纹连接在接头体上,接头体靠螺纹与浮标尾壳拉紧紧固。
③传感器。温盐深(CTD)传感器是剖面浮标的重要组成部分,其稳定性直接决定了浮标测量数据的质量。HM 2000型剖面浮标选用了美国Sea-Bird公司的SBE41CP型CTD传感器。该型传感器不仅可提供高精度、高分辨率和高稳定性的温度、电导率和压力数据,还是国际Argo组织目前唯一推荐使用的自动剖面浮标专用设备。
④控制模块。该模块采用数字化设计,引入微功耗技术智能电源管理及微功耗控制技术,实现了HM 2000型浮标高精度定深、等深度漂移和等密度漂移功能。同时,还具备剖面数据丢失自动重传功能和数据自毁功能。
特别指出的是,由于浮标在使用过程中无法进行能源补充,因此选用一次性、且能量密度高的ER34615型锂亚硫酰氯电池。该型锂电池与其他一次性电池相比具有能量密度高、电压稳定、适温范围广和保质期长等优点,而且电池内部安装有保护模块,防止在使用或者运输时出现短路,确保电池安全可靠。集成后的电池组由控制系统的电源管理模块对其进行管理,依据浮标的工作流程,可分时、分段对不同电池组分别进行管理,使其既能稳定工作,又能保证工作过程中有足够的功耗,维持较长的使用寿命。
⑤通信模块。HM 2000型浮标是基于北斗一代的短报文通信的,可实现岸站与控制中心的双向通信功能。目前,北斗短报文通信覆盖范围为5°N~55°N、70°E~140°E。
为保证浮标能在高低纬度条件下使用,并结合考虑地球的椭圆特性,专门定制了接收开角为180°、140°的微带天线,以保证北斗卫星通信的高效稳定。还在仿真计算基础上,完成了对耐压天线盖的设计加工,解决了天线通信匹配问题。同时,在浮标体外安装了稳定盘,可以提高浮标在海面的姿态,从而进一步提高了通信的可靠性。
1.2 浮标主要性能
HM 2000型剖面浮标主要技术指标如下。
1)剖面测量深度:0~2 000 m;
2)最大下潜深度:2 000 m;
3)工作寿命:不少于70个剖面;
实测混凝土容重为2 436 kg/m3,和易性良好,28 d强度达到设计强度的108%,60 d强度达到设计强度的136%,抗渗性能高于S10的要求,混凝土经时坍落度90 min不超过35 mm,具有良好的泵送性,满足施工要求。按文献[1]中的方法进行计算,浇筑完成后t段时间的混凝土绝热温升见表2。
4)深度分界层数:100层以上,可设定;
5)剖面循环周期:10~240 h任意设定。
CTD传感器的技术性能和主要技术指标如表1所示。
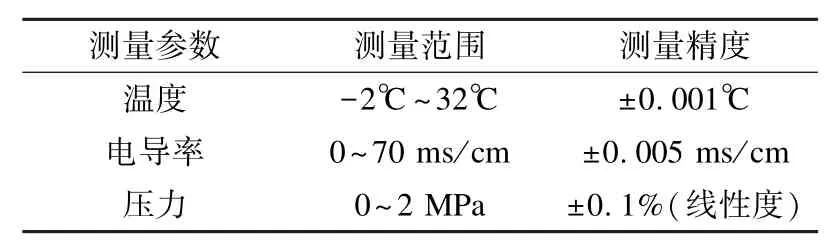
表1 CTD传感器测量参数及指标Table 1 Measured parameters and indexs of CTD sensor
2 HM2000型浮标与国外同类型浮标比较
HM 2000型浮标主要有以下几个方面的技术创新:
1)浮标工作姿态匹配控制技术。浮标只有在直立状态下才能启动,如果浮标倾斜较大的角度达到一定的时间,浮标就会停止工作,须用与此浮标编号相对应的磁铁才能启动浮标的磁敏开关。如果浮标被冲上海岸或者被打捞、且大角度倾斜时间达到设定的时间极限,将再也无法启动浮标,从而实现一定程度的安全保护。
2)采用北斗和GPS双定位模式,实现主动和被动快速可靠定位。
3)浮标壳体采用非金属材料,重量轻、且抗冲击减震效果好,便于批量生产,不易受海水腐蚀和生物附着。
4)恶劣海况保护和规避功能。当浮标在海面遇到恶劣海况、无法与卫星正常通信时,浮标会自动下潜,开始下个剖面测量,并在剖面完成后补发上个剖面的数据;或漂流在设定深度,等待一段时间后,再次上浮发送剖面数据。
6)增设了压力传感器自校准功能。通过加装内置独立的压力传感器,与CTD传感器获得的压力数据,两者有机结合,可以提高浮标的整体可靠性。当浮标上浮到海面后,会分别采集CTD传感器和内置的独立压力传感器的海表压力数据,并上传到岸站控制中心。浮标用户可通过2种海表压力数据的对比分析,还可方便地检验CTD传感器测量的压力数据是否发生漂移。
7)浮标远程遥控功能。一般情况下,浮标按照正常程序运行;当台风经过浮标海域或遇到中尺度涡等海洋现象时,可以通过北斗卫星远程遥控浮标调整测量参数,实现高频次剖面测量等。
此外,HM 2000型浮标与美国产APEX型浮标(约占全球Argo实时海洋观测网中各型浮标总数的47%)相比,在剖面最大测量深度、海面通信停留时长和数据传输方式的便捷方面也具有较大的优势。
2.1 剖面测量深度
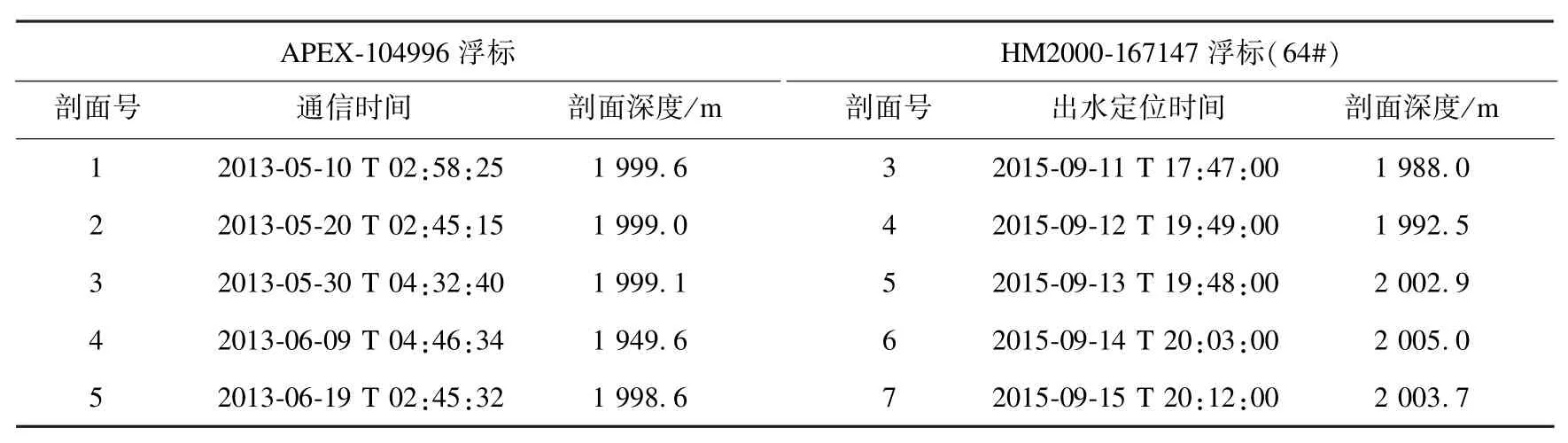
表2 APEX与HM 2000型浮标剖面测量深度比较Table 2 Differences between HM 2000 and APEX in measurement depth
由APEX型浮标和HM 2000型浮标提供的用户手册可知,2种浮标的最大观测深度均可达到2 000 m。但在实际观测(表2)中,发现前者几乎难以达到这一深度,从而造成一些由Argo资料制作的网格数据产品中,最大观测层只能选择1 975 m,而不是2 000 m[5-7]。
由表2可知,APEX型浮标的最大测量深度几乎均没有到达2 000 m,而HM 2000型浮标在大多数情况下到达或超过了2 000 m,但同样有个别深度浅于2 000 m。为了最大限度地保证剖面数据的完整性,并考虑到2 000 m深处实际等密度面的微小变化,建议在设置浮标最大测量深度时,统一设定为2 010 m或2 020 m。
2.2 海面通信停留时长
APEX 型浮标的数据传输既有使用ARGOS卫星通信的,也有采用铱卫星通信的,在中国Argo实时资料中心网站上随机各选取1个浮标,与利用北斗卫星导航系统的HM 2000型浮标的通信时长(表3和表4)进行对比分析。
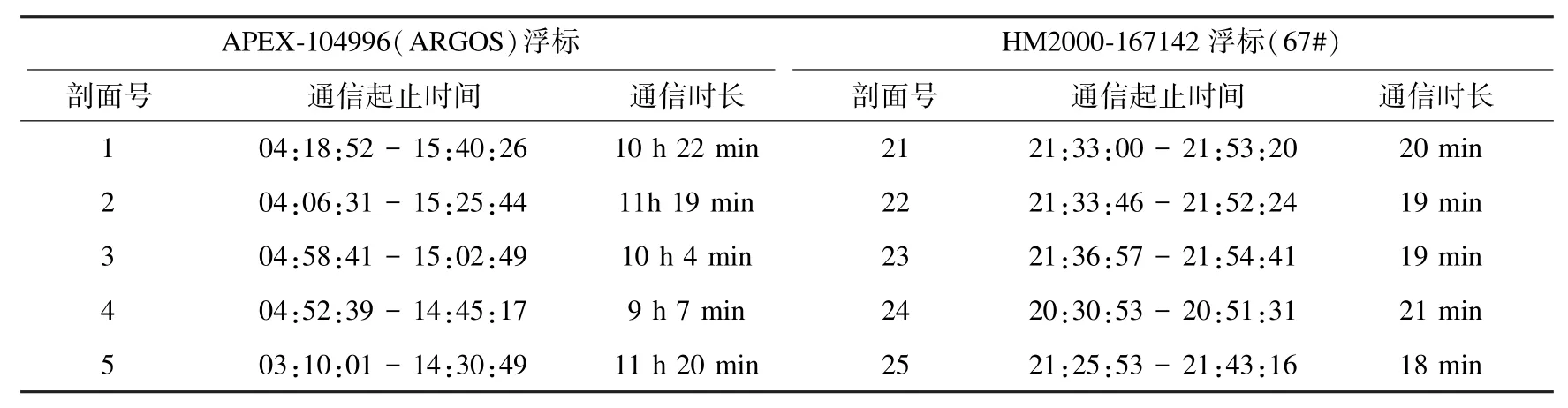
表3 APEX与HM 2000型浮标通信时长比较Table 3 Differences between HM 2000 and APEX in transMission time consumed

表4 APEX与HM 2000型浮标通信时长比较Table 4 Differences between HM 2000 and APEX in transMission time consumed
从表3和表4可以看到,利用ARGOS通讯的APEX型浮标的通信时长普遍大于9 h,最长达11 h 20min;而利用铱星通讯的浮标通信时长大都不超过1 h,最短的近 12 Min,但最长达到了6 h 10 min。然而,HM 2000型浮标的通信时长却均稳定地保持在16~32 Min。由此可见,基于北斗卫星通信系统的短报文通信功能,HM 2000型浮标极大缩短了浮标在海面停留的时间,在降低系统功耗的同时,有效避免了被打捞、撞毁等人为风险。
2.3 数据传输方式
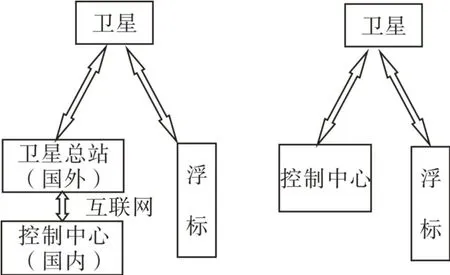
图4 APEX型(左)和HM 2000型(右)浮标数据传输方式Fig.4 Data transMission mode of APEX (left)and HM 2000(right)floats
利用ARGOS卫星或铱卫星通讯的APEX型浮标的数据传输方式如图4(左)。其上行数据(浮标到地面控制中心或数据服务中心)经卫星发送至位于法国图卢兹或美国马里兰的地面接收总站,再打包经互联网发送至浮标用户手中或中国Argo实时资料中心(控制中心)。而下行数据(由地面控制中心或数据服务中心到浮标)则先打包经互联网发送至国外(法国图卢兹或美国马里兰)地面接收总站指定的邮箱,再由总站向卫星发送后,再转发给海上正在运行的浮标。
然而,HM 2000型浮标的数据流(图4右)通过北斗卫星转发,浮标用户或数据服务中心可直接获得浮标剖面数据。因此,相比 APEX型浮标,HM 2000型浮标具有以下优势:
1)剖面数据的实时性。HM 2000型浮标在检测到北斗卫星信号后即可发送数据,通常控制中心或数据服务中心在3 s内就可接收到该数据,20~30 Min就能够发送完一个剖面的完整数据,再经过数据服务中心对数据包解码后,即刻可将温度-深度垂直分布图和盐度-深度垂直分布图显示在监视屏(图5)上,便于操作人员或技术人员随时检查观测剖面的完整性和观测资料是否存在异常等。

图5 HM 2000浮标显控软件Fig.5 Display and control software of HM 2000 float
2)控制指令的实时传输。在HM 2000浮标处于水面与卫星通讯阶段,通过控制中心(北斗剖面浮标数据服务中心)可以向浮标发送设定参数指令,如更改观测周期、漂移深度、最大测量深度和测量间隔等参数,且浮标收到指令后会即刻返回应答,使得浮标可以便捷地执行各种参数条件下的周期测量。而APEX型浮标的参数更改则要相对繁琐得多。
3)数据的安全性。APEX型浮标的数据均需通过国外(美国和法国)的卫星地面站接收,再分发给浮标用户,并由浮标用户各自对浮标观测数据解码,不仅数据的实时性受到影响,而且资料的完整、可靠性难以得到保证。而HM 2000型采用国产北斗卫星导航系统传输,并由北斗剖面浮标数据服务中心(杭州)统一接收、解码,既可确保数据的实时性,更可保证资料的准确和可靠性。
3 HM2000型浮标的业务化应用[8]
近5年来,HM 2000型浮标经过不断优化、改进,其技术性能渐趋完善,并从国内三三两两布放、试应用,逐渐开始成批量(5个、10个)布放,正式用于中国Argo大洋观测网建设中,同时已被国际Argo组织接纳,其观测资料通过世界气象组织(WMO)的全球通讯系统(GTS),以及互联网(WWW、FTP)等与WMO及其国际Argo成员国交换共享,使得HM 2000型浮标成为首个进入全球Argo实时海洋观测网建设、维护的国产海洋观测仪器设备。
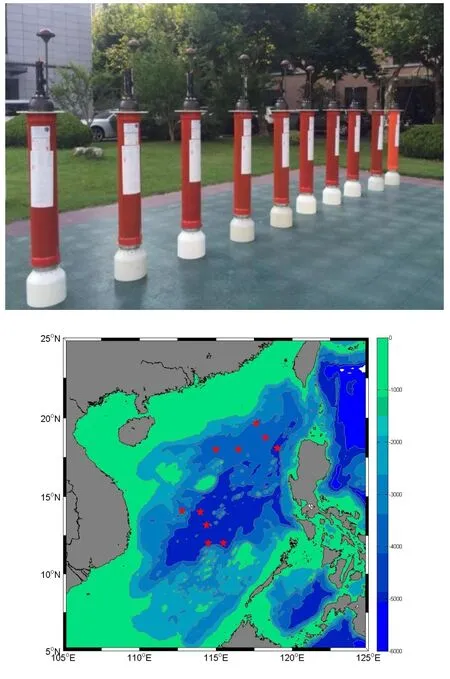
图6 整装待发的HM 2000浮标(上)及其在南海海域的布放位置(下)Fig.6 HM 2000 float prepared(left)and layout position (right)in South China Sea
2016年9至11月期间,由中国Argo计划采购、布放的10个HM 2000型剖面浮标,正式拉开了由我国主导建设“南海Argo区域海洋观测网”的序幕(图6)[9]。
自2016年9月至2018年8月底,在南海业务运行的14个HM 2000型浮标,已经获得了2 100余条0~2 000 m水深内的温、盐度剖面(图7,深色线条表示)。图中浅色线条代表由美国APEX型浮标在2006年9月至2018年8月期间,获得的12 600条0~1 500 m水深内的温、盐度剖面。
从图7不难发现,HM 2000型浮标观测的温、盐度剖面资料质量较高,与APEX型浮标的观测结果完全吻合。关于HM 2000型浮标与其他同类型浮标的比测、分析结果,可以参考相关文献[10]。由此可见,南海Argo区域海洋观测网完全可以利用HM 2000型浮标替代APEX型浮标,由我国主导该区域海洋观测网的建设与维护。

图7 剖面浮标观测资料绘制的T-S点聚图Fig.7 T-S point agglomeration graph of profile float observation
4 结束语
作为我国第一种跻身全球Argo实时海洋观测网的海洋观测仪器设备,HM 2000型剖面浮标对于建设由我国主导的Argo区域海洋观测网,是有明显优势的。HM 2000型剖面浮标也是我国自行研制的海洋仪器设备首次用于国际海洋合作调查计划;同时,也标志着我国BEIDOU已经正式成为服务于全球Argo实时海洋观测网信息和数据传输的3大卫星系统之一。
但目前北斗剖面浮标在全球Argo实时海洋观测网中的地位微乎其微,希望能引起国家有关部门和相关项目负责人(PI)的高度重视,并能通过各种途经给予中国Argo计划和国产剖面浮标研制单位更大的支持和扶持。尽可能采购和布放更多的北斗剖面浮标,进一步扩大国产剖面浮标和北斗卫星系统的国际影响力,提高北斗剖面浮标在全球Argo实时海洋观测网中的占有率,让世界气象组织(WMO)和国际Argo计划成员国能通过全球通讯系统(GTS)和互联网(WWW、FTP)获得更多的来自中国北斗剖面浮标的现场观测数据。从而为各国海洋资源开发、海事安全、海洋运输、海洋渔业管理和近海工业,以及业务化海洋预测预报,更为人类应对全球气候变化做出积极贡献。