基于用户行为的智能扫地机器人优化设计研究
2019-06-27陈茜朦
陈茜朦


【摘 要】基于用户行为分析结果研究智能家庭扫地机器人优化设计策略。首先,研究用户行为和智能化设计之间的关系;然后,运用半结构化访谈法得到用户特征、用户需求和体验要素,在用户进行模拟实验后,将其行为按任务过程进行整合并分析;最后,将分析结果结合用户体验蜂窝模型,提出优化设计策略。现有扫地机器人设计仅关注功能的扩展,而缺乏对用户行为的理解,从而使“智能”变为负担。用户使用过程中存在功能障碍、记忆障碍和效能障碍。我们从解决障碍的方法中归纳出感官性、交互性、智能性、安全性和有效性五个优化设计维度。运用以用户行为为中心的设计方法,由“人”的行为归纳出“物”的设计维度,以此提高设计的智能化和人性化。
【关键词】扫地机器人;用户行为;行为障碍;行为分析;智能化设计
中图分类号:TP24 文献标志码:A 文章编号:1007-0125(2019)15-0181-03
随着消费水平与生活方式的改变,人们对精致生活、高效生活方式的追求,导致了家电消费结构转变升级。智能扫地机器人等新式生活家电的消费环境逐渐成熟,在消费升级趋势下成为新的家电市场消费增长点。智能扫地机器人作为一种新型的家庭服务型机器人,能够自主进行清扫工作,将人们从繁重的家务劳动中解脱出来,提高了生活质量和工作效率[1]。目前智能扫地机器人功能众多,但没有考虑用户的使用习惯和使用环境,在添加了智能化功能之后反而使用户操作更加繁琐。本文针对这一现状,通过对用户在使用扫地机器人时的行为进行分析研究,找出产生行为障碍的原因,提出解决方案,并从产品角度提出对应的优化设计策略。
一、基于用户行为的智能家居产品设计
用户在使用一个产品时,往往经历两个阶段:执行和评估。执行是用户作用于外部世界的动作,评估是将行动目标与外部世界的状态进行比较[2]。对应这两个阶段的是行为的七个步骤:即制定目标,及计划、确认、执行三个执行步骤和感知、诠释、对比三个评估步骤[3]。
用户的使用行为通常是在无意识情况下发生的,只有当用户行为受阻,产生了明显的执行和评估鸿沟,才开始进行有意识的关注和思考[3]。对用户行为进行分析,也就是从执行和评估两阶段寻找用户受阻的原因。从用户行为出发的设计有利于从行为存在的背景和过程中探索产品存在的问题。
智能化家居产品设计初衷是解放人们的双手,使人们从家务中解脱。但目前智能化产品由于功能盲目叠加,导致用户需要花费大量时间和精力进行学习和操作。另外,在使用过程中由于操作繁琐引发失误,且不能找到更优的解决方案,最终导致用户放弃使用该产品。如果是以牺牲用户的良好使用感来换取智能化设计,将难以得到推广。因此智能化产品设计更应关注如何增强用户在使用过程中对功能的良好体验和“愉悦感”[4]。
基于用户行为的智能化设计,就是要实现两个方面的平衡:尽可能多地开发产品功能;尽可能适应现有行为模式,减少用户操作步骤,使用户行为变得简单,并最终渗入到人们的日常生活中。因此,从用户行为来发现并解决产品问题,既能保留产品的齐全功能,又能让用户在使用过程中获得幸福感,提高用户的生活品质。
二、扫地机器人的设计诉求及研究方法
(一)用户特征及需求分析
通过查阅艾瑞咨询的《2017年家电数码消费趋势研究报告》发现,在所有家电数码消费群体中,28-47岁的中青年人群在提高生活品质和生活便利性产品的购买上处于主导位置,他们对扫地机器人的购买决策TGI超过1.0,处于主导位置。数据表明,该人群平均月收入不超过一万元,超过80%拥有稳定住所,超过77%拥有本科及以上学历。他们更愿意尝试和接受新事物,愿意购买自身经济条件允许下的高质量产品,以提高生活舒适度和品质感[5]。
为了选取典型用户来进行用户行为实验,本文采用问卷调查法进行用户调研。问卷设计完成之后,通过线上网络、线下实体店如国美电器、苏宁电器等发放问卷,共计发放问卷100份,有效问卷85份,有效样本率为85%,数据结果可信。问卷主要面向有意购买或已经购买扫地机器人的用户,以此获得调研扫地机器人潜在用户人群与消费目标用户的用户特征、使用动机、用户需求和体验影响因素等。
用户特征:基础属性:以在大中型城市生活且受过高等教育、工作休闲两不误的20世纪70-90年代出生的中青年人群为主;社会关系:大部分为新生家庭,是刚需;消费能力:处于稳定状态,财务宽松;行为特征:关注新式生活电器,对新品体验、产品升级等功能要求较突出,对产品购买决策有较大的主导力;心理特征:对生活品质和产品便利性要求较高。
使用动机:提升生活便利度和品质感。
用户需求:包括吸尘、湿擦、避障、可遥控、自动充电。
體验影响因素:外观设计良好;操作步骤简单;清洁有效;安全性高;电池续航时间长;噪音小;自动充电,断电续扫;维护保养方便;可远程控制。
(二)实验任务
在可用性测试的形成性研究中,对每一次设计迭代的评估,6-8人的样本量是最合适的。最重要的可用性发现通常会在大约前6个参加者的测试过程中观察到[6]。因此,选取了6名目标用户来进行此次实验。用户基本信息见表1。
对于用户行为分析不能单纯对与及其本身的交互动作进行分析,还应该结合用户使用该机器前后的用户行为对扫地机器人进行系统设计[7],因此实验分为以下几个部分。
自由操作:初次接触扫地机器人时,进行自由操作和体验。
人物操作:经过深度学习后,进行规定任务操作,见表2。
后续行为:任务完成后,用户的行为反馈。
(三)用户行为分析
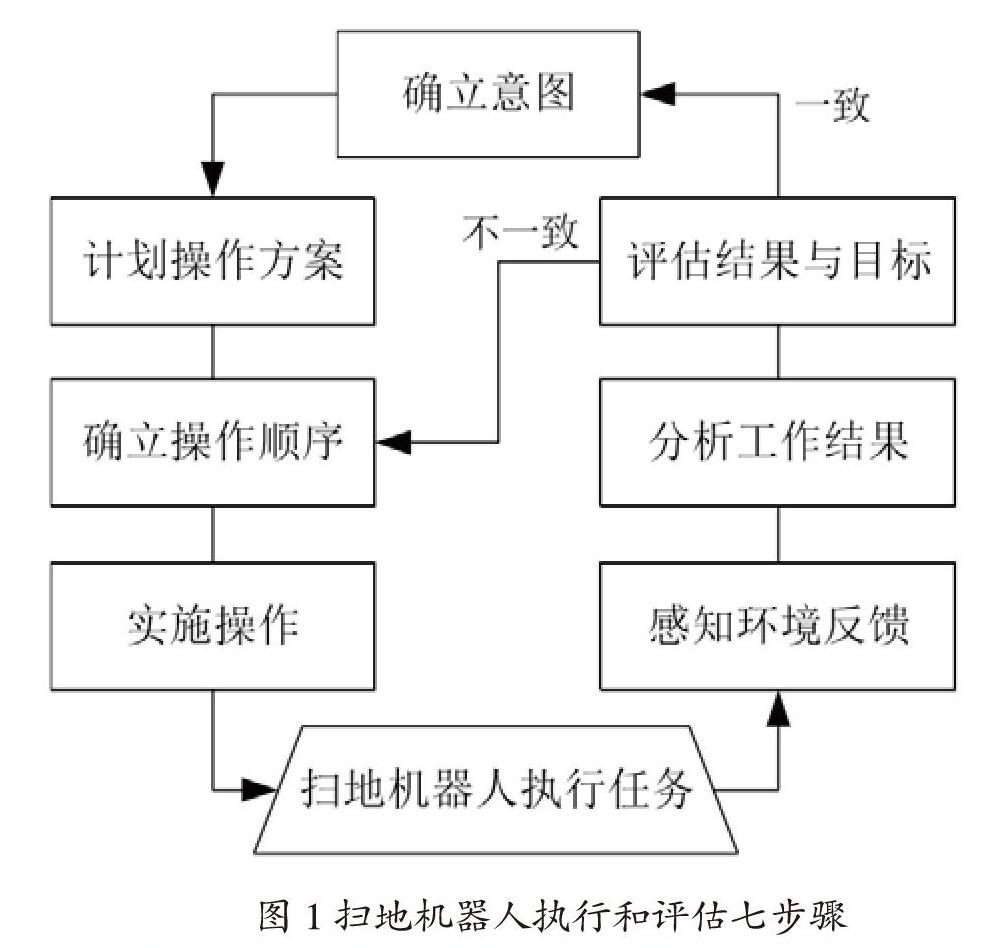
对用户行为进行分析,从中挖掘出用户行为习惯以及使用产品过程中存在的阻碍。把用户使用扫地机器人的行为具体分为7个步骤,即确立意图、计划操作方案、确认操作顺序、实施操作、感知环境反馈、分析机器结果、评估分析与目标。
实验中的用户行为都属于目标驱动型的行动。行为周期从设立的任务目标开始,分别经过执行和评估三个步骤。在评估的最后一步中,如果最终结果与设立的任务目标不一致,用户将重复执行阶段,直至达到目标;若一致,则转到下一个任务目标,开始新的周期。通过观察、记录、分析与归纳总结,在执行与评估阶段,用户行为表现出以下三方面的障碍。
功能障碍:在自由体验阶段,用户往往会在第一时间尝试按下面板上较大的按钮,即用户基于经验而被认为的开关按钮。当用户对按钮进行短按或长按、单击或双击操作时,往往不能得到与预期相符的效果。也存在机器由于指令错误停止工作,却没有给出即时反馈的情况,导致用户表现出迷茫、焦虑的情绪。
记忆障碍:第一类是用户记忆障碍。用户在操作过程中,在开始动作与完成动作之间介入了意外事件导致记忆中断,或者对同一按键进行不同操作导致的记忆混乱,忘记动作的目标、计划或结果,使扫地机器人不能按预期工作。第二类是扫地机器人记忆障碍。在扫地机器人清洁过程中,机器遇障碍,或用户搬动机器人、临时开关房门等,将会导致与先前形成地图不符导致路线规划失败。这些情况都会使扫地机器人不断重复一些步骤或停止工作。
效能障碍:首先,占用时间多。当清洁面积较大、环境较复杂时,用户需要随时关注扫地机器人,在其遇到障碍时及时解决问题,或在尘盒满溢、水箱无水时及时处理,耗费用户大量时间和精力。其次,清洁不到位。市面现有扫地机器人将LDS激光传感器作为独立部件加于顶部,增加了产品的高度,无法清洁较低的沙发底、床底。而圆形设计使墙边、角落和椅子底部无法清洁到位。在湿擦过程中,由于水箱较小,用户需要多次对其进行灌水操作才能完成全屋湿擦任务。湿擦清洁程度不高,用户需要手动进行二次清洁,加重了用户的负担。
三、基于用户行为的智能扫地机器人优化设计策略
基于对用户行为进行分析后总结出的三方面障碍,可以明确看到产品问题所在。探寻产品出现这类问题的原因,结合行为相符、行为相关、行为相似和行为相悖4个设计原则[8],提出针对智能扫地机器人用户行为障碍的5个解决办法:降低用户操作难度可以解决功能障碍;减少用户行为数量;给用户行为即时反馈;不轻易中断用户行为均可解决记忆障碍;减少用户等待时间可以解决效能障碍。Web3.0时代,用户体验蜂窝模型已经升级到以价值为核心,由有用性、可用性、可获性、可寻性、满意度、可信度、交互性和智能性8个因素构成[9]。参考用户体验模型及相关文献,从5个解决办法中归纳智能扫地机器人优化设计的五个维度。
(一)感官性
从感官性进行扫地机器人的优化设计,要考慮产品与用户之间五感的交流[10],更多地调动用户的感官体验。
视觉上,产品所呈现的心理效果要与环境保持统一协调的基调。作为一款清洁型家居产品,不宜使用视觉冲击力强的色彩,应采用白色作为主要色彩,给人以明亮、干净的感受;灰色具有智能感、科技感;粉色营造甜蜜、温馨的家居氛围。运用白、灰、粉等柔和的色彩,可以让用户注意力集中在按键操作上。
听觉上,首先,产品要与产品功能相配合,通过五感交流与用户实现信息的传递,如通过声音提示开启、运行、关闭和危险状态,还可以对错误操作进行语音纠正,对用户需要完成的步骤提供生动有效的提醒,减少用户思考时间和降低用户操作难度。其次,现有清洁方式是通过机械装置进行真空形成巨大气流旋涡,进行除尘动作,随之而来的是持续的噪音。噪声是一种使人感到厌烦的声音,长期作用下可对人产生不良情绪影响,容易出现紧张、忧郁、疲惫、愤怒等情绪[11]。现有解决方案是更换清洁模式,减小吸力以达到降噪处理,但清洁效率也会下降。可以考虑在吸尘口采取消音措施,减少用户的焦虑情绪。
嗅觉上,在水箱内加入香熏油,湿擦后散发出清洁过后的香味,给用户满足感和愉悦感。
(二)交互性
从用户行为的角度看,交互性体现在降低用户操作难度上。对于扫地机器人来说,用户期待的主要功能是清洁地面,而定时、调节模式等都是围绕这一功能衍生的辅助功能。因此,将该产品定义为一键功能产品,在色彩与造型设计上力求简洁大方,避免不必要的装饰,让用户无需过多辨识,就能将注意力集中到操作按钮上。
将附属功能转移到手机APP上进行操作,具有两个优点:第一,一键化设计遵循用户的习惯,使用户能够轻易理解按钮的功能,在脱离使用说明书的情况下也能对其进行操作;第二,手机APP可以展示更详细的信息,如清扫地图、路线规划等,用户能通过交互界面的有效引导进行操作。
(三)智能性
产品智能性体现在减少用户行为数量、对用户的行为给出即时反馈。
首先,在实际使用中,用户行为往往是由外部事件触发,从而建立评估体系和制定目标。这属于事件驱动型的行动。在图像识别技术成熟的时代,扫地机器人对不同污渍采取不同清洁方式,或识别污渍是否需要二次清洁。扫地机器人可以根据用户操作习惯和日常设置的清洁区域、模式、时间来分析用户习惯,构建用户行为模型,自主拟定清洁任务,就能在每日清洁中省略用户的执行步骤。
其次,智能产品具有环境感知、自身识别、信息接收和行为决策等智慧特征[12]。在清洁过程中,扫地机器人应实时检测周围环境,边清扫边快速构建新地图,避免因开关门或移动屋内物品导致的故障。
(四)安全性
安全性体现在不轻易中断用户行为。用户使用扫地机器人的目的是为了提升生活便利度,如果扫地机器人频频出现如缠绕、碰撞、跌落、卡顿等故障需要用户放下手中的事情去解决,反而增加了负担。现有扫地机器人采用精度高、速度快的LDS激光传感器进行测距,但由于光具有穿透性,在落地窗等透明物体和深色物体前可能测距失效,导致碰撞。因此,可以采用具有可塑形性及软碰撞性的软性防撞板对机器人进行全包设计,可以有效防止撞击造成的破损。此外,着重解决电线缠绕导致的拖拽或休眠问题,可采用临时升高底盘的方式,跨越电线后再回落到正常高度。
(五)有效性
有效性体现在减少用户操作和等待时间。首先,对三角形扫地机器人采用上述安全性设计,可以更彻底清扫墙角,提高清洁程度。并且,三角形在千篇一律的圆形中,更符合用户“愿意尝试和接受新事物”的心理,引起购买欲。将传感器置于机身内部,降低产品高度,能有效清洁家居底部地面。
各部件使用模块化设计,独立拆装,便于更换。尘盒、水箱使用抽屉式拆装设计,无需用户反转机器便可取出盒子进行灰尘清理和灌水操作。提高生成地图,以及规划路径和充电、断电续扫的主动高效性。
四、结语
智能扫地机器人优化设计是基于用户行为的设计。从用户行为的两个阶段和7个步骤出发,分析执行和评估阶段存在的功能障碍、记忆障碍和使用障碍,思考障碍产生的原因及从用户行为角度出发的解决对策。感官上,使用白、灰、粉等浅色设计,对吸尘口进行降噪处理,配以特定气味,调动用户的感官体验,在愉悦的情绪中进行专注的操作。交互性上,定义为一键功能产品,降低用户操作难度。智能性上,根据用户习惯自主拟定清洁任务,可以减少用户操作步骤;即时构建地图,对用户行为做出有效反馈。安全性上,创新了越障方式,有效避免电线缠绕。有效性上,采用三角形机体设计,可提高角落的清洁程度;将各类传感器隐藏,可以降低产品高度,更利于清洁家具底部。通过用户行为驱动设计师思考用户行为产生的原因,从而发现问题并解决问题。这种从行为出发的分析方法和落地到物品的设计方法,为用户体验研究提供了全新视角。
参考文献:
[1]任福继,孙晓.智能机器人的现状及发展[J].科技导报,2015,33(21):32-38.
[2] CHUANG M C, Ma Y C. Expressing the Expected Product Images in Product Design of Micro-Electronic Products[J]. International Journal of Industrial Ergonomics,2001,27(4):233-245.
[3]唐纳德·A·诺曼等.设计心理学:日常的设计[M].北京:中信出版社,2015.
[4]张茫茫.智能化家具:家庭空間内产品设计研究[J].装饰,2013,(12):100-101.
[5]李勇,贾佳.智能家电的用户心理需求变化趋势分析[J].包装工程,2017,(4):108-111.
[6]TULLIS T, ALBERT W. Measuring the User Experience: Collecting, Analyzing, and Presenting Usability Metrics[M].Morgan Kaufmann Publishers Inc.2008.
[7]李志英,华慧娟.以用户行为为中心的实验室储药柜设计探析[J].包装工程,2017,(4):227-230.
[8]郑林欣.基于用户行为的产品设计原则[J].包装工程,2016,(14):73-76.
[9]焦婧.用户体验蜂窝模型在网络教学中的应用研究[J].北京联合大学学报,2013,2(2):27-30.
[10]唐纳德·A·诺曼等.设计心理学:情感设计[M].北京:中信出版社,2012.
[11]郭桂梅,邓欢忠,韦献革等.噪声对人体健康影响的研究进展[J].职业与健康,2016,32(5):713-716.
[12]杨楠,李世国.物联网环境下的智能产品原型设计研究[J].包装工程,2014,(6):55-58.
