高速铁路ATO系统人机界面的新特征
2019-06-27张友兵陈志强王建敏吴培栋
张友兵,陈志强,王建敏,吴培栋
(北京全路通信信号研究设计院集团有限公司,北京 100070)
经过多年的发展和建设,目前我国高速铁路正朝着智能铁路的方向发展。在人工驾驶的情况下,司机的驾驶技术对列车的运行状况影响显著。将自动驾驶技术引入高速铁路,使ATP系统和ATO系统有效结合起来,在ATP系统保证安全的前提下,ATO系统不但可以提高停车精度、准点率和运行舒适度,还能大幅减少司机的工作量[1],成为高速铁路重要的研究和发展方向之一。
2016年3月,珠三角城际铁路莞惠和广佛肇开通运行,城际CTCS-2+ATO系统在我国首次投入运营[2]。在此探讨的CTCS-3+ATO列控系统可兼容CTCS-2+ATO功能,运行期间进行CTCS-2与CTCS-3等级转换时,不退出自动驾驶模式,是一种功能更加完备、应用更加广泛、运行速度更高的高铁自动驾驶系统。
1 高速铁路ATO系统
高速铁路ATO系统在CTCS-2/CTCS-3级列控系统的基础上,车载设置ATO单元实现自动驾驶控制,地面设置专用精确定位应答器实现精确定位,地面设备通过通用分组无线服务(General Packet Radio Service,GPRS)通信实现站台门控制、站间数据发送和列车运行计划调整处理。高速铁路ATO系统主要功能包括车站自动发车、区间自动运行、车站自动停车、车门自动开门(防护)、车门/站台门联动控制[3-6]。
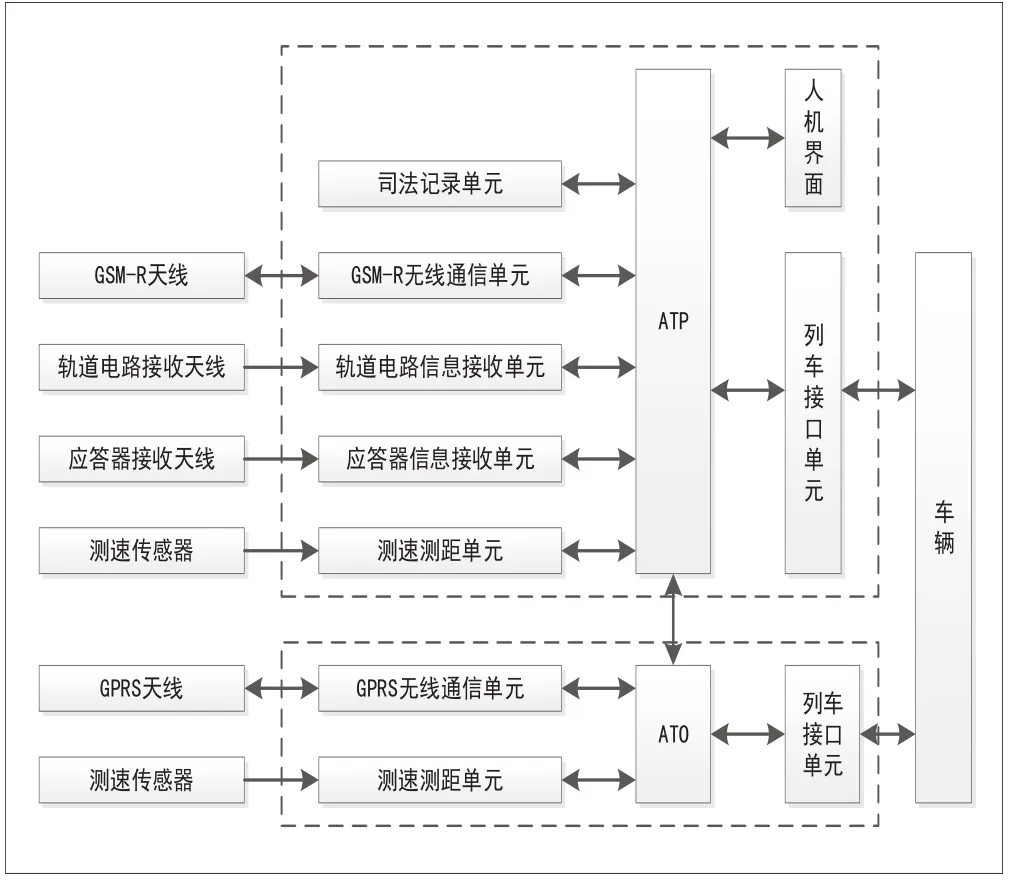
图1 高速铁路ATO系统车载设备结构
高速铁路ATO系统车载设备结构见图1。ATO系统车载设备由原ATP相关功能模块和新增ATO相关功能模块2部分组成。原ATP相关功能模块包括ATP、GSM-R无线通信单元、轨道电路信息接收单元、应答器信息接收单元、测速测距单元、司法记录单元、列车接口单元和人机界面。新增ATO相关功能模块包括ATO、GPRS无线通信单元和列车接口单元。GPRS无线通信单元通过GPRS天线与临时限速服务器(Temporary Speed Restriction Server,TSRS)建立无线连接,互相发送数据。ATO通过列车接口单元与车辆建立连接,向车辆发送开/关门、加/减速等控制命令,从车辆接收车门状态、牵引制动状态等反馈信息。ATO与ATP建立连接,互相传递信息,分工协作,ATO负责自动驾驶,ATP负责安全防护。ATO将工作状态发送给ATP,ATP再将ATO相关工作状态转发给DMI,通过DMI向司机显示ATO的实时工作状态。司机也可以通过DMI输入无线呼叫命令,ATP将无线呼叫命令转发给ATO,ATO执行命令与TSRS建立通信连接。
在CTCS-2级和CTCS-3级列控车载设备中,司机通过观察和操作DMI完成监控和调整列车运行状态[7-9],DMI是司机与列控车载设备之间的桥梁,也是掌握列车运行状态的关键设备,熟练使用DMI是司机保证列车行车安全、提高运行效率的必要技能和手段。
高速铁路车载设备增加ATO功能后,DMI界面显示信息更加丰富,也增加了新的司机操作。在此从图标显示、文本提示、控车提示3方面对DMI的新特征进行详细解读。
2 图标显示
2.1 ATO控车模式
在完全监控(Full Supervision,FS)模式下,且ATO控车的其他条件均满足,经过司机操作,ATO才能转入自动驾驶模式(Automatic Mode,AM)模式,由ATO实现列车自动驾驶。在转入AM模式之前,DMI显示FS模式(一种ATP模式)。转入AM模式后,DMI显示AM模式(一种ATO模式)。AM模式下,ATO对列车自动加速或减速,实现自动驾驶。当自动驾驶的条件不再满足时,ATO将退出AM模式,DMI将显示ATP的实际控车模式。
2.2 ATO与车辆网络连接状态
ATO与列车网络控制系统(Train Control and Management System,TCMS)之间采用多功能车辆总线(Multi-function Vehicle Bus,MVB)进行通信,ATO向车辆发送控制信息和状态信息,车辆向ATO发送状态及反馈信息。当ATO与TCMS通信正常时,DMI显示ATO与TCMS连接正常图标;当ATO与TCMS通信故障时,DMI显示ATO与TCMS连接断开图标,ATO将退出AM模式。
2.3 GPRS电台网络注册状态
车载设备上电后,GPRS电台注册到网络后,DMI显示GPRS电台已注册图标。当GPRS电台断电,或GPRS电台故障,或GPRS天线故障时,DMI界面上GPRS电台已注册图标消失,由于无法正常收发无线消息,ATO与TSRS的通信会话将随之断开。
2.4 ATO与TSRS会话连接状态
ATO与TSRS的会话连接有3种状态:断开、正在连接、已连接。ATO收到呼叫命令后,正在与TSRS建立通信会话时,DMI显示“正在连接”图标;ATO与TSRS成功建立通信会话后,DMI显示“已连接”图标;ATO与TSRS建立通信会话失败,或者ATO与TSRS通信会话中断,DMI显示“断开”图标。
ATO与TSRS建立通信会话的场景有:
(1)车载设备上电后,完成启机流程,司机通过DMI输入TSRS呼叫信息;
(2)在未与TSRS建立通信会话时,列车运行过程中,从地面应答器收到的应答器报文包含TSRS呼叫命令。
ATO与TSRS建立通信会话后,结束通信会话的场景有:
(1)在已与TSRS建立通信会话时,列车运行过程中,从地面应答器收到的应答器报文包含结束与TSRS通信会话的命令;
(2)在已与TSRS建立通信会话时,通过无线从TSRS收到结束通信会话的命令。
在ATO与TSRS已建立通信会话的情况下,TSRS向ATO发送运行计划,若运行计划有效,在区间运行时,ATO将根据运行计划中的到达时刻调整列车速度,保证列车准点到达车站。若运行计划要求在前方站停车且“办客”,列车进站停稳停准后,ATO自动开门,并向TSRS发送开门联动命令,实现车门和站台门的联动打开。所以,只有当ATO与TSRS通信会话正常时,ATO才能根据运行计划行车,进站后才能实现车门和站台门的联动打开和关闭。
2.5 ATO牵引制动状态
列车过分相时,主断路器断开,车辆从外部获取不到能量,所以过分相时,车载设备不对列车输出牵引命令。当ATO正在对列车进行加速时,DMI显示牵引图标,如果列车进入分相区,ATO停止输出牵引命令,DMI显示惰行图标,当列车出清分相区后,ATO继续对列车输出牵引命令,DMI重新显示牵引图标。
2.6 运行计划可用状态
当ATO与TSRS建立无线连接后,调度集中系统(Centralized Traffic Control,CTC)向TSRS发送运行计划,TSRS向ATO转发运行计划。运行计划覆盖前方2个车站,包含列车到发股道、列车到发时刻、列车通过等信息。ATO检查运行计划有效,DMI将显示“运行计划可用”图标。如果ATO检测到运行计划无效,DMI将显示“运行计划不可用”图标[11]。
列车在区间运行时,如果运行计划有效,ATO根据运行时分计算出合理的运行速度,控制列车准点到达车站;如果运行计划无效,ATO根据司机选择的驾驶策略控制列车速度,快行策略低于允许速度2 km/h,正常策略低于允许速度5 km/h,慢行策略低于允许速度8 km/h。
列车进站停车后,如果运行计划有效,计划为“到发”且“办客”,ATO自动开门;如果运行计划无效,或运行计划有效但计划为“通过”或“不办客”,ATO不自动开门,由司机手动开门。
列车以AM模式发车,运行计划有效时,基于运行计划中的“发车时间”在DMI上显示发车倒计时,提示司机人工关闭车门,并按压“发车按钮”发车。
ATO按当前运行计划自动驾驶列车时,若未收到更新的运行计划,继续执行当前站间的运行计划直至停车,停车后ATO不提供发车倒计时和自动开/关门功能,DMI将显示“运行计划不可用”图标。
干旱是在全球气候变化和人类活动双重驱动下,水资源—经济社会—生态与环境复杂系统极值缺水过程在不同时空尺度上的综合体现。按受旱机制分类,干旱分为:气象干旱、水文干旱、农业干旱和经济社会干旱。按受旱成因分类,干旱分为:资源型干旱,即干旱区降水量稀少,土壤缺水,不足以满足人的生存和经济发展的需求;工程型干旱,即缺少水利工程的开发调度;政策型干旱,即非理性的水资源分配;结构型干旱,即水质水量达不到用水要求;布局型干旱,即追求经济社会快速发展情势下的水土资源不匹配;管理型干旱,即水资源得不到高效利用和有效调配,缺少全局可靠规划与应对策略;复合型干旱,即多种因素综合作用下的干旱。
2.7 ATO跳停标志
如果运行计划有效,在TSRS发送给ATO的运行计划中,“到发/通过”标志为通过时,表明列车在前方车站不用停车,直接通过,DMI将显示“ATO跳停标志”。当列车完全越过标记为“通过”的车站后,DMI停止显示“ATO跳停标志”。
2.8 开门允许图标
列车进站时,从地面应答器收到站台侧信息,列车停稳停准后,ATP根据站台侧信息给出开门允许信息,包括左侧门允许、右侧门允许和双侧门允许,DMI在界面上显示开门允许图标。当门控模式为自动开门/手动关门(Automatic Open/Manually Close,AM)时,ATO根据开门允许信息自动生成开门命令,打开对应侧车门,并实现车门站台门的联动打开。当门控模式为手动开门/手动关门(Manually Open/Manually Close,MM)时,司机按压开门按钮,ATO根据门允许信息对司机的开门动作进行合法性检查,打开对应侧车门,并实现车门站台门的联动打开。
3 文本提示
3.1 不在TSRS管辖范围
列车走出本TSRS管辖范围,以该TSRS未知的应答器为参考向该TSRS发送位置报告,TSRS识别出列车已不在本TSRS管辖范围之内,向ATO发送文本信息“不在TSRS管辖范围”,同时发送结束通信会话命令。DMI界面显示文本“不在TSRS管辖范围”,同时可以观察到ATO与TSRS无线连接断开。
3.2 门联动失败
列车进站停稳停准后,当门控模式为AM时,由ATO自动打开车门。当门控模式为MM时,由司机手动打开车门。打开车门时,同时启动车门站台门联动打开过程。车载ATO 向TSRS发送开门命令,TSRS收到开门命令后,根据编组信息和地面站台门设置情况,确认对应股道列车停稳且停准后,向对应的列控中心(Train Control Center,TCC)发送开门命令,TCC向站台门系统发送开门命令。如果开门命令未能成功传递给站台门系统,或者站台门系统故障,导致站台门不能正常打开,在规定时间内,如果车载ATO从TSRS收到的站台门状态一直为关闭状态,车载ATO判断车门站台门联动打开失败,将通过ATP向DMI发送文本信息“门联动失败”,DMI界面显示文本“门联动失败”,提示司机联系地面工作人员手动打开站台门。
完成乘客上车作业后,无论门控模式是AM还是MM,都由司机手动关闭车门,并触发车门站台门联动关闭过程,如果在规定时间内,ATO检测到站台门未能正常关闭,也通过ATP向DMI发送文本信息“门联动失败”,提示司机联系地面工作人员手动关闭站台门。
4 控车提示
4.1 进入ATO模式
对于始发站,司机以C2部分模式或C3目视模式发车,当列车在运行过程中进入完全监控模式且满足进入AM模式条件时,“ATO 启动”灯闪烁,司机按压“ATO启动”按钮进入AM模式,DMI显示“AM”模式。
当ATP处于完全监控模式,且具备下列ATO使用条件时,提示司机确认车载设备转入AM模式,司机若未确认,则通过声光等提示信息以一定时间间隔提醒司机确认;待司机确认后方可进入AM模式。当ATP处于其他工作模式时,不允许使用AM模式。
进入 AM 模式的必要条件包括:
(1)处于完全监控模式;
(2)方向手柄前向;
(3)牵引制动手柄处于零位;
(4)ATO 工作正常;
(5)ATP 未输出紧急制动;
(6)动车组允许 ATO 模式。
对于中间站,车载设备处于AM模式、ATO确认车门关闭、方向手柄向前、牵引制动手柄处于零位,且发车条件具备后,闪烁“ATO启动”灯提示司机,司机确认车门关闭后,根据发车提示按压“ATO启动”按钮,ATO根据列车运行计划信息,控制列车发车。
若发车时车载设备无法转入AM 模式,需由司机人工驾驶列车从车站出发,待具备进入AM模式条件后,“ATO启动”灯闪烁,司机按压“ATO启动”按钮进入AM模式。
“ATO启动”灯不同状态具有不同含义,常亮表示ATO当前处于AM模式;AM 模式下从常亮到闪烁,提示发车;非AM 模式由熄灭到闪烁,提示进入AM 模式;熄灭表示ATO当前处于非AM模式。
4.2 退出ATO模式
ATO处于AM模式时,若满足任一退出AM模式的必要条件,应自动退出AM 模式并提示司机,若司机在5 s内确认,则ATP不输出常用制动,确认后转为司机操作;若未及时确认,则5 s后ATP 输出最大常用制动,确认后ATP缓解制动。
退出 AM 模式的必要条件包括:
(1)方向手柄不在前向位;
(2)牵引制动手柄处于非零位;
(3)ATO工作不正常;
(4)ATP 输出紧急制动;
(5)动车组不允许ATO模式。
4.3 预选驾驶策略
列车运行过程中运行计划不可用时,ATO车载设备按预选驾驶策略中的默认策略控制列车运行。ATO可提供快行、正常、慢行3种预选驾驶策略,司机根据列车运行情况,可人工调整预选驾驶策略。使用驾驶策略自动控车时,在ATP防护下区间停车和按预选驾驶策略实现站台定点停车,ATO不提供自动开/关门功能。
4.4 无线呼叫信息
车载设备上电完成启机流程,司机可以按压DMI上的“TSRS数据”键,输入TSRS呼叫信息,呼叫TSRS,与之建立通信会话。ATO与TSRS建立通信会话后,会将TSRS呼叫信息发送给ATP,ATP将TSRS呼叫信息保存在非易失存储区里。当车载设备再次上
电时,司机选择“TSRS数据”界面时,可以使用或修改上一次呼叫成功的TSRS呼叫信息。
4.5 发车倒计时
当运行计划可用时,列车以AM模式发车,ATO根据运行计划中的“出发时刻”和当前时间,计算出发车倒计时,通过ATP实时传递给DMI,在DMI上显示发车倒计时,提示司机关闭车门并发车。
5 结束语
高速铁路ATO系统是一种新型的列车控制系统。将自动驾驶技术引入高速铁路后,可以提高系统的自动化程度,降低司机的劳动强度,实现列车既高速又高效地安全运行,是未来列车运行控制的一个主要发展方向。高速铁路车载设备增加自动驾驶功能后,DMI设备呈现出一些新特征,对DMI的新特征进行详细解读,有利于通过观察DMI更好地掌握列车的实时运行状态,指导司机做出正确的操作,保障列车更安全更高效地运行。
