基于多传感信息融合的轨道线形检测
2019-06-27
(上海工程技术大学 城市轨道交通学院,上海 201620)
0 引言
由于轨道线路直接承受列车的载荷,容易造成轨道线路的不平顺影响到列车运行的安全性[1],因此,实现对轨道线路的高精度检测具有重要意义。随着惯性传感器技术和视觉导航技术的不断发展,多传感器组合测量成为我国轨道状态参数检测的主要方式[2-6]。由于惯性测量单元中的加速度计和陀螺仪在长时间检测过程中会产生累积误差,使得检测精度较低[7];双目视觉在运动过程中易受晃动或环境因素的影响引入误差,测量精度难以得到保障[8]。因此,如何提高轨道线路的检测精度已成为轨道检测领域的主要研究方向[9-10]。
针对加速度计和陀螺仪组合测量方法,文献[11]首先利用陀螺仪数据更新姿态矩阵,将加速度信息转换到地理坐标系中,最后利用小波变换对加速度信号进行去噪处理并利用积分滤波器对加速度信号进行二次积分来获取物体的运动轨迹。考虑到双目视觉拍摄图像测量可以提供轨道线形的绝对坐标,文献[12]对车辆运动时拍摄的钢轨图像利用拼接技术恢复钢轨表面的纹路,利用双目视觉定标原理计算钢轨轮廓上的空间点三维坐标,得到钢轨的线形信息。
为了提高轨道线形检测精度,本文提出一种基于多传感信息融合的轨道线形检测方法。基于捷联惯性系统和双目视觉的测量原理建立了双目视觉与惯性测量结合的多传感数据融合模型,并利用扩展卡尔曼滤波来有效融合双目视觉、陀螺仪和加速度计的测量信息,提高测量数据的精确度,从而达到提高轨道线形检测精度的目的。实验表明,该方法的测量精度与惯性测量方法相比提高了近9倍,且测量所得坐标在三个方向上的最大位移绝对误差不超过0.536 mm,具有较高的实用性。
1 多传感信息融合检测原理
多传感信息融合检测系统主要由两个摄像机构成的双目视觉系统和陀螺仪、加速度计组成的惯性测量单元组成,所有传感器被固定安装在同一运动载体上。检测系统结构如图1所示。为了实现高精度的轨道线形检测,利用手眼定标算法将各传感器直接测量数据转换到世界坐标系下[13],采用双目视觉与惯性测量结合的多传感数据融合算法,建立双目视觉、陀螺仪和加速度计之间位移及姿态角的融合关系,并利用扩展卡尔曼滤波实现双目视觉、陀螺仪和加速度计的测量信息的融合,得到运动载体准确的位移、姿态角信息。利用融合的姿态角实时更新姿态矩阵为位移提供运动方向,从而获取运动控制平台的空间运动曲线及轨道线形,实现轨道线形的高精度检测。

图1 多传感器融合检测系统
1.1 捷联惯性系统测量原理
捷联式惯性系统检测原理是:将测量器件加速度计和陀螺仪直接安装在同一运载体平台上,当运载体平台运动时,加速度计获取沿运载体X、Y、Z三个轴方向的加速度信号,陀螺仪获取沿运载体X、Y、Z三个轴方向的角速度信号。利用陀螺仪获取到的角速度信息分别更新三轴上的姿态矩阵,从而将加速度三轴测量数据转换到地理坐标系中,通过对地理坐标系中的加速度信息计算得到运载体在三轴中的运动速度和位置信息[14]。
在进行坐标系转换时,采用旋转矩阵来表示坐标间的转换关系。陀螺仪绕X、Y、Z三轴的转动角度分别为α、β、γ可通过对陀螺仪测量的三轴角速度积分获得。欧拉角与旋转矩阵的转换关系为:
R(α,β,γ)=RX(α)RY(β)RZ(γ)=


(1)
式中,欧拉角α、β、γ对应的旋转矩阵分别为RX(α),RY(β),RZ(γ)。采用计算量相对较小的四元素法对姿态矩阵实时更新,从而将加速度信号从运载体坐标系转换到地理坐标系下,转换关系如下:
(2)
通过坐标转换得到地理坐标系中的加速度信号后,分别对三个轴向上的加速度信号a积分可获得采样周期内运载体在各轴向上的运动速度v和位移s,计算公式如下:
(3)

(4)
式中,Ts为加速度计测量采样周期。当运动控制平台按照预定轨迹在空间运动时,惯性测量单元连续采集陀螺仪数据以及加速度信息。若测量的陀螺仪、加速度信息存在误差,积分得到的运动速度以及位移曲线会出现严重偏差问题,因此在轨道检测中需提高测量数据的精确度。
1.2 双目视觉测量原理
双目立体视觉是利用两个摄像机从不同的位置拍摄被测物体,通过计算同一空间物理点在不同图像中的映像点之间的位置偏差从而获取物理点的空间三维坐标的方法[15]。图2为双目视觉系统示意图,使用两个不同位置的摄像机同时拍摄同一物体的图像,已知任意一点P在两个摄像机中的投影点分别是p和p′,根据三角几何关系计算P点在两幅图像中的双目视差便能获得该点的三维空间坐标值。同理,可得到其他空间点的三维空间坐标值,实现图像到真实世界的三维场景重建。

图2 双目视觉系统示意图

(5)
(6)
(7)
式中,f为相机焦距。
选取标定板原点作为坐标系原点建立世界坐标系,根据双目相机定标原理计算出相机坐标系与世界坐标系转换的旋转和平移关系,实现相机坐标系中空间点P(XC,YC,ZC)到世界坐标系的转换。两坐标系之间的关系为:
(8)
当运动控制平台按照预先设置的轨迹连续运动时,左右两侧摄像机以固定频率连续拍摄标定板图像,确保拍摄的标定板图像信息完整。通过对连续拍摄的图像进行标定、特征点匹配等计算,得到摄像机在三维空间内的运动轨迹[16]。在图像拍摄过程中,摄像机容易受到振动和光线等环境因素的影响,导致图像缺失或者图像清晰度不够,对后续的标定、计算产生影响导致检测结果不准确,因此在图像采集时需保证摄像机的高分辨率和拍摄图像的高清晰度,存在一定的难度。
2 基于扩展卡尔曼滤波算法的多传感器数据融合
扩展卡尔曼滤波是通过预测值结合测量值对当前系统状态的最优估计值进行估计的,利用这一特性对双目视觉、惯性单元测量的加速度信号和陀螺仪数据进行融合。将惯性测量单元的加速度计和陀螺仪的测量值作为预测值,双目视觉测量值作为观测值,利用扩展卡尔曼滤波实现多传感信息的融合,得到系统状态的最优估计值。双目视觉与惯性单元的加速度计和陀螺仪测量数据融合模型如图3所示。

图3 视觉与惯性信息融合模型
具体融合过程如下:首先,通过坐标系转换将各传感器的直接测量数据转换到世界坐标系下;其次,利用双目视觉系统解算得到的运载体位置、姿态信息与惯性单元测量计算得到的运载体位置、姿态信息分别求差,将差值带入扩展卡尔曼滤波器进行优化,估计出惯性单元测量的位置误差、姿态误差;最后,把估计出的位置误差、姿态误差反馈回惯性单元测量下一个周期的检测计算中进行误差补偿和反馈校正。直至循环结束,得到测量系统的所有参数的最优估计值。将修正后惯性单元测量输出的位置信息结合融合后的姿态角实现运载体空间定位,即可得到测量系统在世界坐标系中的运行轨迹。
双目视觉与惯性单元组合测量系统的状态向量由惯性单元测量的加速度信号计算得到的世界坐标系中的速度信息、位置信息以及惯性单元的测量误差构成。设双目视觉与惯性测量单元组合测量系统的状态向量为[17-18]:
(9)

利用扩展卡尔曼滤波算法得到任意时刻测量系统的状态方程为:
(10)
其中:aG为世界坐标系下的加速度数据,可通过对加速度计直接测量值进行坐标转换得到。
测量系统的量测方程由摄像机拍摄图片计算得到的空间特征点组成。任意空间点在摄像机坐标系和像素坐标系中的坐标分别为(xi,yi,zi)和(ui,vi),根据两者之间的转换关系得出n个特征点构成的测量方程为:
(11)
利用扩展卡尔曼滤波算法得出t时刻系统状态协方差为:
P(t|t)=(I-Kg(t)HP(t|t-1))
(12)
式中,P(t|t-1)为系统上一时刻的协方差,Kg(t)为t时刻系统的卡尔曼增益,计算公式为:
(13)
式中,H为测量系统的输出矩阵,R(t)表示测量噪声协方差。由此计算出t时刻的信息融合结果:
p(t)=pI(t)+Kg(t)(pI(t)-Zp(t))
(14)
θ(t)=θI(t)+Kg(t)(θI(t)-Zθ(t))
(15)
式中,pI(t)、θI(t)为t时刻惯性测量输出的位置和姿态,Zp(t)、Zθ(t)为t时刻惯性测量输出的修正量,p(t)、θ(t)为经多传感信息融合模型输出的t时刻融合位置和姿态角信息,即扩展卡尔曼滤波输出的最优估计值。完成当前时刻的滤波计算后,系统依据收到的下一时刻惯性测量参数解算输出进入下一周期的滤波运算。直至结束即可递推求解出最优轨道空间线形参数[19]。
3 实验验证
3.1 实验条件
采用如图4所示的控制平台进行实验验证。系统所用到的实验设备包括,陀螺仪和加速度计组成的惯性测量单元、标定板、两台数字摄像机。

图4 轨道线形检测实验平台
3.2 实验过程
实验开始前,设置好运动控制平台在三个轴向上运动路径。运动路径由12段直线构成,运动路线的真实节点如表1所示。控制检测平台多轴运动,保证左右摄像机均可拍摄到完整的定标板图像。
实验开始后,按照预定的路线移动控制平台,左右两侧摄像机连续拍摄标定板图像,并同步采集运动状态下的惯性测量单元陀螺仪数据以及加速度信息。
3.3 实验结果
在采集到的所有数据中等间隔选取12组图像及每组图像对应帧惯性单元的加速度计和陀螺仪测量数据,利用Matlab软件编程进行仿真得到运动控制平台在世界坐标系下的运动坐标及姿态。表1为运动曲线节点真实坐标,表2为单独使用惯性单元测量计算得到的世界坐标系中的运动坐标;表3为双目视觉与惯性信息融合模型计算得到的世界坐标系中的运动坐标。

表1 运动曲线节点真实坐标 mm
表2和表3给出了采用常规惯性测量方法与多传感信息融合方法计算得到的运动控制平台在世界坐标系下的运动坐标。对比表1、表2和表3的数据,可以看出采用多传感信息融合方法计算得到的运动坐标更接近通过运动控制平台设计的运动路径的真实节点坐标。为更直观地看出两种测量方法的区别,图5中的(a),(b),(c)为采用常规惯性测量方法与多传感信息融合方法输出结果在X、Y、Z三轴位移误差对比图。通过分析可知,采用多传感信息融合方法计算结果在三个轴上的绝对偏差明显小于常规惯性检测方法。相对于惯性单元测量方法的误差大小,多传感信息融合方法在X、Y、Z三个轴向最大绝对偏差分别为0.536 mm、0.455 mm、0.460 mm,检测精度提高近9倍。说明多传感信息融合检测方法得出的结果具有较高的准确性。
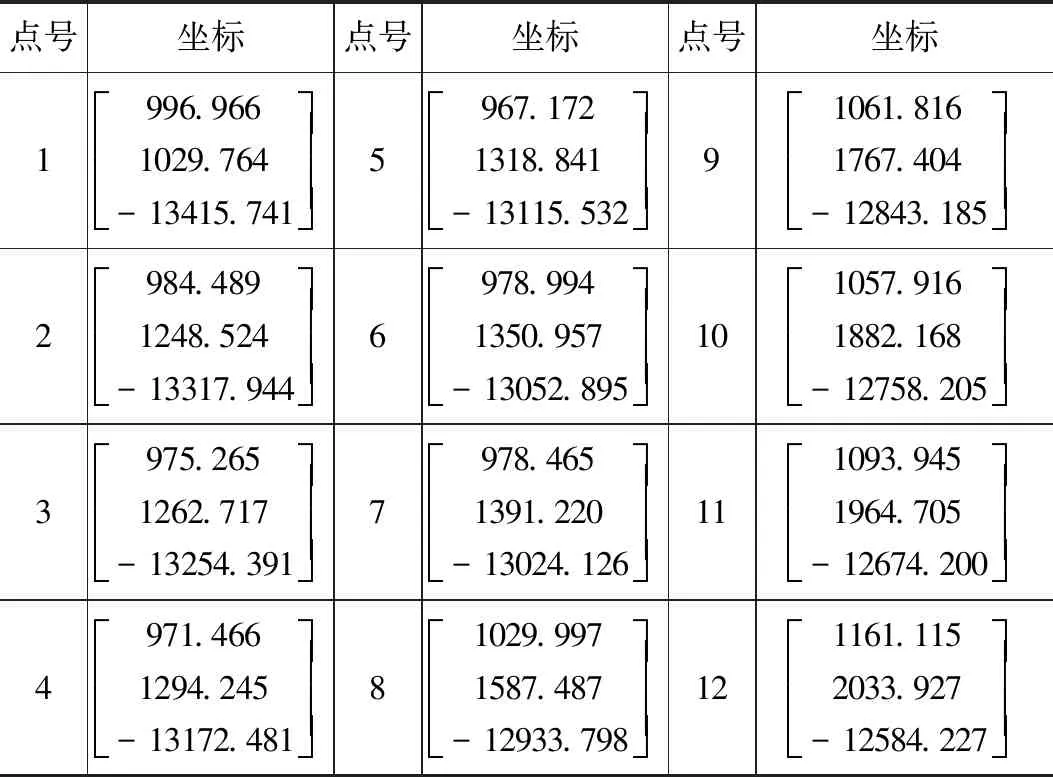
表2 惯性测量在世界坐标系下的运动坐标 mm

表3 融合模型在世界坐标系下的运动坐标 mm

图5 不同测量方法三轴位移误差对比图
4 结论
利用扩展卡尔曼滤波算法将双目视觉与惯性测量单元加速度计、陀螺仪测量数据进行融合能够消除传感器在测量过程中存在的误差,增强检测数据的精确度,达到提高检测精度的目的。通过搭建测量平台进行实验验证,惯性测量单元测量计算的结果在X、Y、Z三个轴向最大绝对偏差分别为4.501 mm、4.192 mm、4.220 mm,多传感信息融合模型输出结果在X、Y、Z三个轴向最大绝对偏差分别为0.536 mm、0.455 mm、0.460 mm。与常规的惯性检测方法相比较,多传感信息融合测量方法精度提高了近9倍。证明多传感信息融合方法能够有效地提高轨道空间线形检测精度,具有较高的实用价值。
