丙烯透平压缩机组防喘振控制优化改造方案研究
2019-06-26张鹏军訾旭华石月明马卫东
张鹏军,訾旭华,石月明,马卫东
(内蒙古伊泰集团 煤化工管理部,内蒙古 鄂尔多斯 017000)
0 引言
离心式压缩机组是大型煤化工工厂中提供动力的核心设备之一,而压缩机防喘振控制是保证压缩机正常运行的重要因素,同时压缩机的节能效果对于工厂整体节能也起到关键作用。煤化工工厂中,采用丙烯制冷压缩机保证制冷效果,提供足够冷量,满足净化装置低温甲醇洗对冷量的正常需求。内蒙古伊泰化工公司120万吨/年精细化学品示范项目应用的丙烯制冷压缩机驱动方式为蒸汽透平,高温高压蒸汽高速进入汽轮器推动压缩机运转。压缩机采用三段压缩机结构,压缩介质为丙烯。压缩机设计的调整方法为变转速,范围为4094rpm~5732rpm。压缩机由抽凝式汽轮机驱动,汽轮机进汽压力8.95MPag,抽汽压力为4.1MPag。丙烯蒸汽通过压缩使得气体温度升高,再使排出的气体进入冷凝器冷却成为液体。在流动过程中不断吸收周围物体的热量,达到制冷的目的。目前丙烯压缩机组运行在自动控制投用率低、防喘振回流阀开度大、能耗水平高的状况下,亟需技术改造。
1 机组存在的问题及改造的必要性

图1 丙烯压缩机组操作画面Fig.1 Operation screen of propylene compressor unit
透平丙烯制冷压缩机组自开工以来,入口压力自动控制回路不能投用,只能手动控制,对操作员要求高,控制效果差。装置压缩机的防喘振阀门不能关闭,开度大,造成压缩机能耗居高不下。压缩机三返一防喘振阀门开度在47%左右,三返二防喘振阀开度在32%左右,三返三防喘振阀开度在22%左右,从而导致压缩机运行的能耗过高。
压缩机喘振线未经实测。由于设计、制造误差的存在,压缩机实际喘振线和理论预测喘振线往往存在显著差异。使用理论喘振线往往不能完成准确和适度的防喘振保护。
现有控制系统选用算法比较简单,未根据丙烯制冷压缩机的工艺过程使用专用的控制算法,压缩机性能控制不能投用。现有系统设计有压缩机入口压力性能控制,但不能投入自动运行,基本上是由防喘振控制阀门手动调整压力。这一般是由于系统使用简单PID而非专用于机组控制的控制算法。
压缩机入口压力完全依靠人工手动操作控制,易诱发误操作。现有系统实际上不能自动控制压缩机入口压力,依靠频繁的人工介入和手动操作方可维持压力平稳,操作难度大,控制效果差,影响装置平稳运行和产品质量。
综上所述,现有机组控制系统算法简单,对人员素质要求高,存在一定安全隐患;机组运行能耗高,亟需改进,使用高效的控制方式,降低机组能耗。
2 改造的难点和解决思路
现有丙烯制冷压缩控制系统采用压缩机主机厂原配套的Triconex TS3000,压缩机组控制方案中存在的问题:
1)压缩机喘振线不能有效补偿实际工况与设计工况偏差;2)机组喘振线不准确;3)机组控制处于手动操作状态;4)压缩机性能控制为简单的PID串级控制(入口压力与转速)未考虑速度与喘振控制器之间耦合,导致性能控制无法投用。因上述原因压缩机机组防喘阀一直处于开启状态,操作画面如图1所示。
考虑到原有系统的不足,通过技术改造方案为:

图2 汽轮压缩机组耦合控制实例Fig.2 Coupling control example of steam wheel compressor unit
1)现场进行喘振试验,计算绘制实测防喘振线,实现实测防喘振控制。
2)解决从手动到自动的压缩机组性能提升控制,对于较复杂的回路进行解耦控制。
3)基于无关坐标系的算法,得到归一化的压缩机喘振线进行优化控制。
3 实测防喘振控制
压缩机厂家会提供一组压缩机的理论计算喘振线。由于设计院或压缩机厂家的设计余量考虑,往往给出的压缩机喘振线比较保守,而且压缩机出厂前,因为无法进行工艺气配比等原因,无法实测喘振线。而通过在压缩机开机过程中在不同转速下实测喘振线,准确定义压缩机的喘振线。通过压缩机的运行工况能够和工艺需求更好地匹配,真实地反应了压缩机的运行工况。
根据实际情况经验,有相当数量的压缩机的实际喘振线在理论喘振线的右下位置,即压缩机会比理论预测更早喘振。在这种情况下依照理论喘振线控制是无法防止压缩机喘振的,也是比较危险的。这也是部分防喘振控制无法投入自动控制,防喘振阀门长期保持相当开度的原因之一。所以实测压缩机喘振线是压缩机防喘振控制非常必要的一环。
在实测喘振线的基础上,进一步实现自动压线控制,不仅是在压缩机负荷高,工作点远离喘振线时能够投入自动控制,即使在低负荷下,甚至是在开工初期运行波动较大时仍可以投入自动运行。压线控制不但能实现最大的节能效果,更重要的是扩展了压缩机的操作空间。
1)临界喘振点测试
依据经验大多数的压缩机正常运行中,防喘振阀完全关闭后实际工作点都远离喘振区,而在启、停车或不正常状态时工艺条件不是正常的操作条件,防喘振阀的打开对工艺不会造成影响。
2)喘振点测试
对于要准确测试到喘振点的机组,通过判断主要依靠看出口压力表,这是机械式的仪表没有延时反应快。听声音的变化喘振将要发生时机组运行的声音有明显的迹象,快于参数的变化,能更早的发现喘振点。
通常选取以往常用速度附近的3~5个速度75%,80%,85%,95%,100%,做实测喘振测试。
4 解耦控制
压缩机防喘振控制回路之间、防喘振控制回路和性能控制回路之间,存在强烈的耦合关系,调整一个回路会立即、显著地影响到其它的控制回路,缺少解耦控制也是一般控制系统无法投入自动运行的重要原因之一。
以图2的压缩机系统为例,当进气调速阀门开大时,进气量增大,会导致压缩机组转速上升,提供给压缩机组出力增大。当抽气阀开大时,会导致压缩机组转速下降,提供给压缩机组出力变小。所以回路的相互影响,会使得转速调节达到平稳状态很困难,特别是在装置不是满负荷工况有变化的情况下,尤为明显。
不仅如此,丙烯压缩机组为三段压缩式制冷机组,存在三段返一段、三段返二段、三段返三段3个相互耦合的防喘振阀。为了消除回路间的相互耦合干扰,使用一般控制系统时操作员只能把阀门投到手动,并且人为开大一点,让压缩机的运行点离喘振控制线远一点。这样虽然能够消除干扰,但造成能耗变大。采用更高级的解耦控制算法,能够同时监控和协调各段的运行情况,做到全自动的协调控制。
5 无关坐标系算法
即用于压缩机控制的喘振极限线SLL的计算与气体分子量MW、入口压力Ps、入口温度Ts、入口气体比热比Ks和入口气体压缩因子Zs无关,而只与压缩机组本身的内部机械构造有关。使用无关坐标系算法得到归一化的压缩机喘振极限线。

简化压头计算:
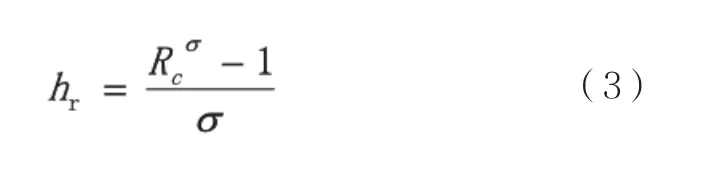
简化流量平方计算:
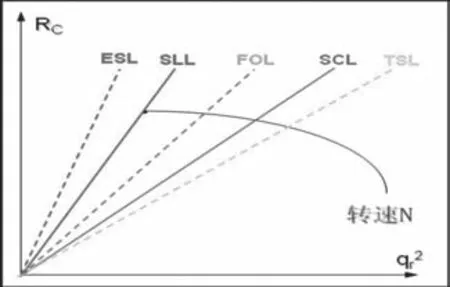
图3 无关坐标系防喘振控制五线示意图Fig.3 Independent coordinate system anti-surge control five line diagram
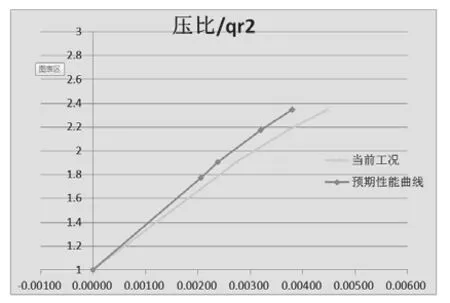
图4 三段返一段改造后,预期工况与实际工况对比Fig.4 3 Comparison of expected working conditions and actual working conditions after the transformation of the return section

Pd——压缩机出口压力(绝压)。
Ps——压缩机入口压力(绝压)。
Td——压缩机出口温度(绝对温度)。
Ts——压缩机入口温度(绝对温度)。
防喘振控制算法采用基于无关坐标系的5条计算与控制曲线,结合了闭环主PI控制响应和开环阶梯保护响应,使得压缩机在运行中无论是面对一次缓慢的降负荷过程扰动,还是面对由于工艺设备异常工况造成的剧烈扰动,都能够迅速、准确地增加压缩机的流量、保护压缩机始终工作在安全区域;同时,由于采用了先进的、准确的基于无关坐标系的防喘振控制算法,使得压缩机的回流流量(或放空流量)保持在最低水平,从而最大限度地降低能量消耗。
6 结论
通过实施防喘振控制优化,实现如下效果:
1)改造后节约9.5MPa高压蒸汽3t/h,经济效益明显。
2)在4094rpm~5732rpm调速范围内选取5个转速点,分别测得压缩机一段、二段和三段的真实喘振点,从而生成真实喘振线。
3)防喘振实现全自动控制,保证不发生喘振的前提下机组可以使控制线自动运行。
4)一段入口压力自动控制,自动维持压力平稳。