基于BDS的边坡监测智能预警系统的设计与实现
2019-06-26王迪邹浜文静郭秦
王迪,邹浜, 文静, 郭秦
(1. 西南科技大学 城市学院,四川 绵阳 621000;2. 千寻位置网络有限公司,上海 200438)
0 引 言
在国家提倡构建“智慧城市”[1-2]的背景下,传统的边坡监测技术因其自动化程度低、警情上报慢和响应时间长等缺点已不能满足人们的监测需求,快速、高效、智能化的边坡监测新技术已成为相关科研领域的研究热点.
北斗卫星导航系统(BDS)是我国自主研制并拥有完全自主知识产权的卫星导航系统,可在全球范围内全天候、全天时为用户提供高精度、高可靠性的导航、定位和授时服务[3].BDS已经成为目前边坡监测的重要技术支撑.本文主要介绍一种以BDS为支撑,互联网为基础,具有灾情智能判别功能的边坡监测智能预警系统.该系统符合“互联网+北斗”新发展模式,具有一定的应用价值.
1 系统总体方案设计
1.1 边坡监测智能预警系统的总体构成
基于BDS的边坡监测智能预警系统,分为硬件和软件两部分,硬件部分包含全球卫星导航系统(GNSS)监测站、GNSS基准站、系统服务器和信息显示大屏终端,软件部分包含GNSS解算模块、数据集成管理模块、监测预警平台,同时外接了其他系统平台,总体构成如图1所示.
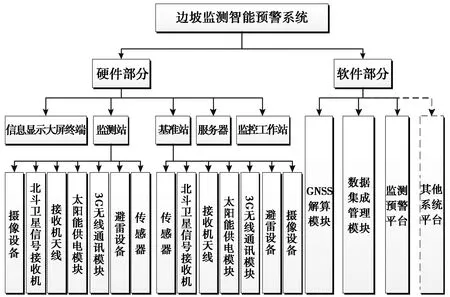
图1 边坡监测智能预警系统总体构成
1.2 边坡监测智能预警系统的网络结构
边坡监测智能预警系统的运转流程如图2所示.
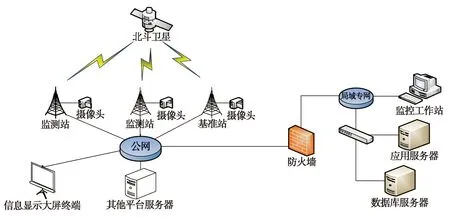
图2 边坡监测智能预警系统的网络结构图
1)GNSS监测站和GNSS基准站接收机按照一定频率实时接收BDS数据,传感器采集土压力、土质含水量等参数,将这些数据进行一定格式的封包,通过3G通讯模块实时发送至应用服务器,利用GNSS解算模块对数据实时解算;
2)解算完毕后将相关坐标信息和位移信息发送至数据库服务器保存,同时通过自动判别模型对数据进行分析、建模和预测,汇制成图形、数据或表格在监控工作站上显示;
3)若某个监测站发生警情(如滑坡或塌方),监测预警平台会将警情信息通过公网向其他信息平台(如交通、旅游部门平台、车联网平台)以及边坡沿线的信息显示大屏终端转发警情信息;
4)当警情消除后,监测预警平台则会通过公网向其他信息平台和信息显示大屏终端发送警情撤销指令.
1.3 边坡监测智能预警系统的主要功能
边坡监测智能预警系统可对有隐患的边坡进行无人值守的全天候高精度监测,一旦出现灾情,灾情信息将及时向外界发送,以便在最短时间内获取信息,将可能产生的损失降至最低.系统主要功能如图3所示.

图3 边坡监测智能预警系统主要功能
1)GNSS解算模块可以添加和删除监测站、基准站,修改它们的相关属性;可以根据用户需要选择若干数量的监测站和基准站构成监测网,进行整网解算;在接收到监测网中各站点回传的原始数据后解算出各监测站的精确坐标,传输至数据集成管理模块;
2)数据集成管理模块获取到各监测站的实时精确坐标后,对当期坐标和往期坐标进行对比分析,得到准确的位移数据,通过各个自动分析模型得出监测体中横断面的位移信息、变化过程趋势、沉降信息,将位移变化趋势绘成用户指定的直方图和折线图,通过历史的位移变化率预测未来某时间段内监测体的整体位移趋势;对传感器的数据进行统计和分析,并形成规范的日志文件;
3)监测预警平台通过分析监测体的位移数据判断监测体安全状态,位移值超过系统设定的阈值,同时传感器的数据也发生异常,监测站摄像头会自动打开并拍照,实时回传照片,接收照片后,图像自动识别算法开始启动,通过对比图像,判断发生位移的原因,如果排除了接收机和监测墩故障后,确认发生了灾情,则生成警情信息,经管理员授权后警情信息可向其他平台和信息显示大屏终端转发;备份警情信息,形成日志文件; 地理信息系统(GIS)地图上对监测站和基准站进行可视化展示;
4)车辆网平台接收到警情信息后,实时推送到用户的车载终端,如果用户正在驾车开往该区域,则会进行语音提示;架设在监测体附近的信息显示大屏终端接收到警情信息后,会按照一定的格式在屏幕上进行显示,用于提示过往行人和车辆;其他系统平台接收到警情信息后会将其发布到网上或通过收音频道进行广播.
2 系统关键技术
基于BDS的边坡监测智能预警系统采用B/S开发架构[4]编程实现,管理员和用户只需通过浏览器访问特定域名并输入账号和密码便可对系统进行访问.该系统关键技术如下:
2.1 BDS高精度差分定位技术
为了达到毫米级的监测精度,需要从硬件和软件两个维度着手,首先是硬件,需要采用高精度的北斗定位接收机,本系统监测站和基准站的BDS接收机采用的静态/快速接收机,静态精度技术指标为:水平±2.5 mm+0.5 mm/km RMS,垂直±5 mm+0.5 mm/km RMS;接收机天线采用扼流圈天线,削弱多路径效应影响;基准站和监测站的基线控制在10 km以内,监测精度可达毫米级.
其次还需要有合理的数据处理方法,监控中心的解算软件会对BDS接收机接收到的原始数据进行粗加工、数据预处理、BDS基线向量解算和网平差处理等几个阶段[5-6],具体流程如图4所示.

图4 BDS数据处理基本流程
数据预处理主要包括: 1)运用卡尔曼滤波算法对原始数据进行平滑处理,消除定位数据中的随机误差[7-8]; 2)用多维粗差定位与定值算法剔除粗差[9]; 3)对原始观测值加各种模型的改正; 4)将各类数据文件标准文件格式进行加工处理.
数据预处理后进行基线向量解算,基线向量解算的步骤如下:
1)基线解算自检:基线解算控制参数设置;
2)读入星历数据:提取原始数据的星历数据部分;
3)读入观测数据:读取预处理后的观测值数据,包括起始站和终点站的观测数据、单点定位坐标、观测时刻、C/A码伪距、P码伪距和载波相位;
4)三差解算:将双差观测值在历元间进行相减,组合成三差观测值,建立观测方程,进行解算后得到三差解(对于短边,三差解的精度往往不高,通常三差解的目的在于得到比较近似的基线边,便于进行周跳修复);
5)周跳修复:先用载波相位求差法探测周跳,得到周跳发生的历元,然后用多项式拟合法对该历元前后的数据进行拟合,达到最终修复周跳的效果;
6)进行双差浮点解算:若共观测到n颗卫星的信号,则双差观测方程组将比三差观测方程组增加n-1个未知数,双差解得到更进一步的未知点坐标和以浮点数表示的整周模糊度;
7)整周模糊度分解:采用FARA[10]方法和LAMBDA[11]方法求解整周模糊度.
8)进行双差固定解算:在整周模糊度得到正确的固定后,进行双差固定解算.
基线向量解算完毕后,系统对整个监测网进行独立基线网平差,平差后得到最终的坐标数据.
2.2 灾情自动判别技术
为了使系统可以7(天)×24(小时)无人值守地全自动运行,需要解决灾情的自动识别问题.系统对于灾情的识别主要通过三个方面判断,分别是: 1)位移值是否超过模型预设的阈值; 2)传感器回传的数据是否异常; 3)摄像头回传的图像是否有异常.只有当位移值超过模型预设的阈值,传感器回传的数据和摄像头回传的图像均产生异常时,才判定灾情发生.灾情自动判别主要涉及到以下关键技术:
2.2.1 点位稳定性分析
本系统运用改进平均间隙法[12-13]去判断监测点是否发生位移.
改进平均间隙法将监测点的X坐标、Y坐标以及高程H分开判别,对监测网两期的观测值进行平差后,分别求出两期监测网中各点的X坐标间隙、Y坐标间隙和高程H间隙,即:—dxi、dyi和dhi(i=1,2, …,n,n为监测点的个数).dxi、dyi和dhi的计算如式(1)所示:
(1)
式中:Xji和Xki分别是点i在第j期和第k期的X坐标平差值;Yji和Yki分别是点i在第j期和第k期的Y坐标平差值;Hji和Hki分别是点i在第j期和第k期的高程H的平差值.
根据式(1)中计算的坐标间隙可以按式(2)计算X、Y坐标和高程H间隙的方差:
(2)
式中:t为监测网的网点个数;PdX、PdY和PdH分别为dX、dY和dH的权阵,通过协因数传播律求得.
先对监测网两期数据进行平面精度一致性检验,若检验通过,则说明两期监测网的平面测量精度相同,便可以进一步求算两期监测网的平面联合单位权中误差μhor,再根据文献[14]求出两期监测网X方向和Y方向的单位权中误差μX和μY.
再对监测网两期数据进行高程精度一致性检验,若检验通过,则说明两期监测网的高程测量精度相同,求出高程单位权中误差μver.现提出原假设H0:两期监测网中的点均为稳定点.根据F检验的性质,构造F检验的统计量为
(3)
式中:统计量在一定的显著性水平α下,再结合第一自由度t和第二自由度f,可以查询F分布表得出其临界值Fa,t,f然后分别比较FX、FY、FH与Fa,t,f的大小.
以X方向为例,若FX≤Fa,t,f则原假设H0成立,即两期监测网中均无点位移动,稳定性分析完成.若FX>Fa,t,f,则拒绝原假设H0,说明两期监测网中有点位发生移动.同理,也可以进行Y方向和H方向的稳定性分析.
2.2.2 图像移动判别技术
本系统采用的图像移动判别方法主要通过对比图像目标体中心坐标与图像监测点坐标之间的差值变化来实现[15].
该方法由以下环节构成:
1)图像目标体的选取以及图像坐标系的建立.图像目标体,即与当前图像中除目标体以外的对象颜色反差剧烈且形状较为规则的对象.边坡监测多为野外监测,所在区域主色调多为绿、黄和白树木、黄土和石块,因此选取图像目标体时,可选取鲜红色或紫色规则物体,如果没有,应在监测点布设时安插一块鲜红色或紫色的圆形铁牌作为目标体.在建立图像坐标系时,为方便坐标提取和测算选取图像左上角为原点建立坐标系,以横轴为X轴,向右为正方向;纵轴为Y轴,向下为正方向.
2)感兴趣区域(ROI)[16-17]的提取.由于设定的图像目标体的颜色为紫色和鲜红色,应对图像在色调、饱和度和强度(HSI)[18]空间中的色调子空间进行颜色提取,初步确定ROI.由于摄像头采集到的图像为RGB[19-20]格式,因此需要实现RGB空间到HSI空间的转换.
3)图像灰度化,通过像素遍历法,确定感兴趣区域的中心坐标.
4)边坡状态判定.在选取图像目标体后,还应选取图像中比较有代表性的边坡特征点为图像监测点,设参考点坐标为(X,Y),图像监测点坐标为(x,y),
(4)
式中:ΔX是两者的横坐标差;ΔY是两者的纵坐标差;ΔS是两者在图像坐标系中的直线距离.只有当ΔX、ΔY和ΔS中的两个或两个以上超过系统所设置的阈值时,则判定边坡的状态发生了变化,否则认为边坡状态稳定.
3 应用案例
四川省绵阳市科技示范项目运用本系统对某景区的边坡进行了自动监控.施工人员在景区内外的边坡上布设若干个监测点,其中两个监测点布设在省道边坡面上,在边坡东面距离边坡1.5 km的地方安装了显示大屏,用以显示预警信息.监测点和显示大屏在软件界面中的显示如图5所示.

图5 监测点和显示大屏在软件界面中的显示
该系统外接了显示大屏,同时外接了景区管理平台、市旅游局管理平台、市交通局管理平台和车联网管理平台,一旦监测点发生位移,系统则会向指定平台和管理人员发送预警信息,预警值按照要求分为三级预警设置,预警发生后按照相关等级,自动发送相关指令到相对应的IP地址(管理平台)上.预警模块同时与短信以及E-mail模块相连接,一旦发生危险预警,会自动根据设置,向相关邮箱发送预警E-mail和向相关人员(景区管理人员、市旅游局管理人员和市交通局管理人员等)手机发送预警短信.
同时该系统能自动生成预警记录,一旦预警产生,相关负责人必须填写预警情况说明书,未填写则自动定期发送短信以及报警提醒,确保事故概率最小化.
在系统正式开始运行至今,平面监测精度≤5 mm,高程监测精度≤8 mm,预警成功率为100%,灾情漏报率和误报率均为0.该系统自动化和智能化程度高,对整个景区的安全保障起到了重要的作用.
4 结束语
综上所述,可以得出以下结论:
1)本文提出的基于BDS的边坡监测智能预警系统采用B/S开发架构编程实现,在软件层面上集成了完备的数据处理方法, 集数据处理、数据存储、数据分析、信息管理、灾害预警和跨平台信息发送等功能于一身,一体化、自动化和智能化程度高.
2)该系统在关键技术上采用了BDS高精度差分定位技术,使平面和高程监测精度均能达到毫米级,同时运用传统的点位稳定性分析方法和图像移动判别技术,在自动判别灾情方面,具有良好的可靠性,使得灾情的误报率进一步降低.
3)该系统具有可扩展性,可外接其他系统平台,与其他系统形成一个网络整体,让边坡监测预警信息应用更加广泛,经过一段时间的实践证明,该系统运行期间,对监测区域的安全保障起到了重要的作用,有效减轻了管理者的工作负担,有一定的推广价值.