基于压电换能器的声发射源定位成像研究
2019-06-25王少锋王道瑞王建国
王少锋,王道瑞,王建国
(内蒙古科技大学 机械工程学院,内蒙古 包头 014010)
0 引言
薄板类金属结构件被广泛用于制造工程结构,如汽车、压力容器和飞机[1-3]等。随着使用年限和负载的增加及自身老化,板结构中会产生疲劳裂纹和腐蚀,其整体稳定受到严重影响,从而导致结构破坏,甚至造成严重事故[4-5]。
近年来,声发射(AE)技术以其实时、动态的优点得到快速发展,但在声发射源的定位方面始终没有较大的突破。刘增华等[6]以碳纤维复合材料板为研究对象,将多个声发射传感器按一定的几何关系布置,组成多组传感器阵列,研究了声发射源与传感器阵列之间的相对角度关系,并在此基础上实现了碳纤维复合材料板中的声发射源定位。Sedlak等[7]将Akaike信息准则(AIC)方法与短期平均/长期平均值(STA/LTA)技术结合,通过分析信号的首次到达时间,在多层薄板中进行声发射源定位研究。
基于以上论述,为了快速、直观地定位声发射源,本文提出一种基于时间反转(TR)聚焦成像的声发射源定位方法[8-9],对采集到的声发射信号进行时间反转处理,实现板件中声发射源的精确定位。
1 时间反转法
1.1 时间反转聚焦原理
时间反转最早应用在光学领域,法国科学家芬克将其引入声学领域,并进行了相关的研究[10-11]。时间反转法的基本原理是声的互异性原理。时反聚焦是指不同传感器接收到的信号在时间上有先后差异,将信号在时域反转后,再从相应的传感器重发回声源,最终信号会同时到达声源处,形成聚焦。
声场的互易性原理[12-13]是指a点发射的信号由位于b点的传感器接收等于由b点发射的信号被a点传感器接收,即声场在两点间传播具有可逆性,用格林函数表示为
G(a,t0|b,t)=G(b,t0|a,t)
(1)
假设声发射信号S(ω)经过介质传播被传感器接收,则接收到的信号可表示为
E(ω)=S(ω)×Hi
(2)
式中:Hi为声发射信号从声源传到第i个传感器的传递函数;E(ω)为声发射信号的频谱。将时域上的声发射信号E(t)时间上反转,即在信号E(ω)的频域取共轭,故时反后的信号E(-t)可表示为
(3)
式中“*”表示声发射信号的复共轭。将时反后的信号在对应的传感器加载并发射回声源处,即传感器代替声源位置,两者位置相互交换,由于传播的介质未发生变化,故传递函数仍为Hi,在声源处接收到的信号D(ω)为
(4)
多个信号D(ω)时间反转后,重新发回声源处,则它们在时间零点处时域是同相叠加的,即信号同时刻、同相位到达声源处,则它们会在同一时刻得到主相关峰值,实现聚焦。
1.2 定位成像原理
由以上时间反转理论分析可知,时反信号只会在声发射源处实现聚焦,因此,将监测件划分监测区域,该区域即为声发射源的搜索区域,区域中的每个网格点作为搜索点。当声发射应力波在结构中传播时,通过处理声发射信号可以获得信号的能量和幅值。计算从所有点到传感器的长度,通过距离和波速计算得到时间延迟。从第一个搜索点到最后一个搜索点重复扫描聚焦过程,通过获得信号在每个点叠加的幅值,最后以每个点的幅值作为像素值在计算机软件中以损伤波动图像进行表示,像素最大值即颜色最深处为声发射源的位置。
2 实验与分析
本文所有的实验均在一个表面光滑的5052铝合金板上进行,板件尺寸为1 200 mm×1 200 mm,厚为3 mm。信号采集系统采用美国物理声学公司(PAC)的Express二代采集仪。传感器为R15型声发射传感器,其共振频率为150 kHz,每个传感器通过前置放大器(PAC,MISTRAS,2/4/6)与声发射采集系统相连接,信号经由前置放大器进行放大处理。
2.1 波速的测量
波速的选取通过对实验材料的实际测量计算获得,测量方案如图1所示。采用国际通用的Hsu-Nielsen断铅法[14-15]模拟声发射事件的发生,两个传感器分别布置在实验板左侧,用来接收声发射信号,断铅点位于两个传感器的右侧。通过对声发射传感器采集到的信号进行互相关分析[16-18],最高部分峰值对应的时间点分别为信号到达两个传感器的时间,由此可得到达时间差,波速(v)为
(5)
式中:d为两传感器间的距离;τ为时间差。
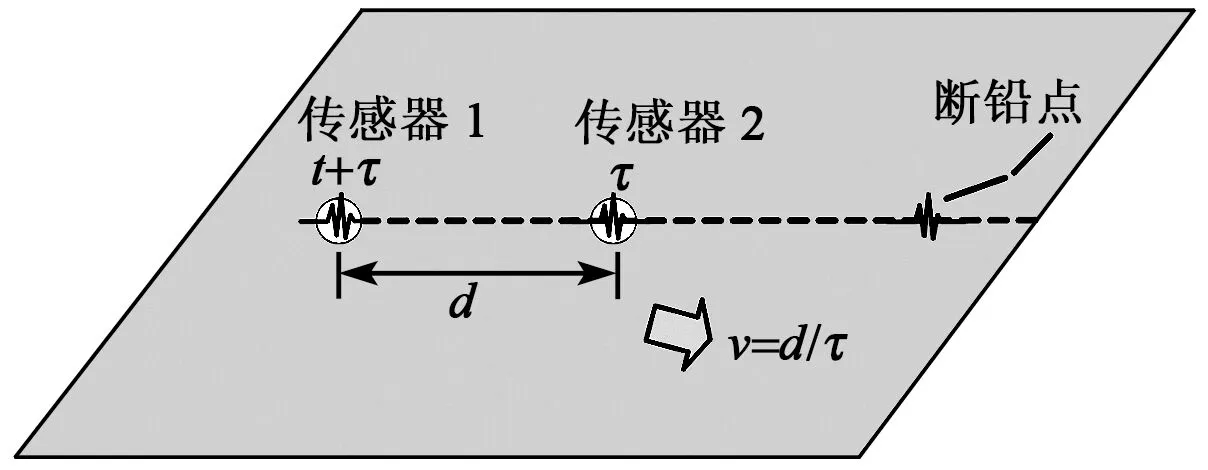
图1 速度测量原理

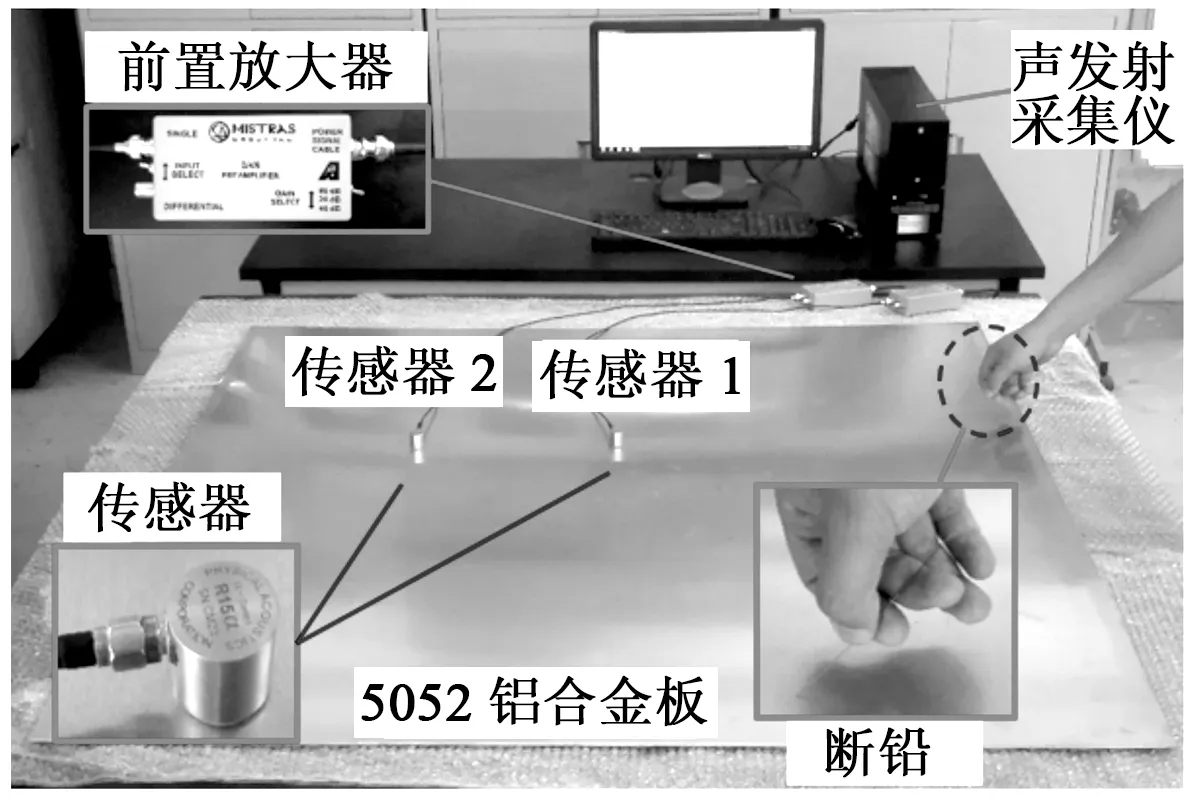
图2 速度测量实验图
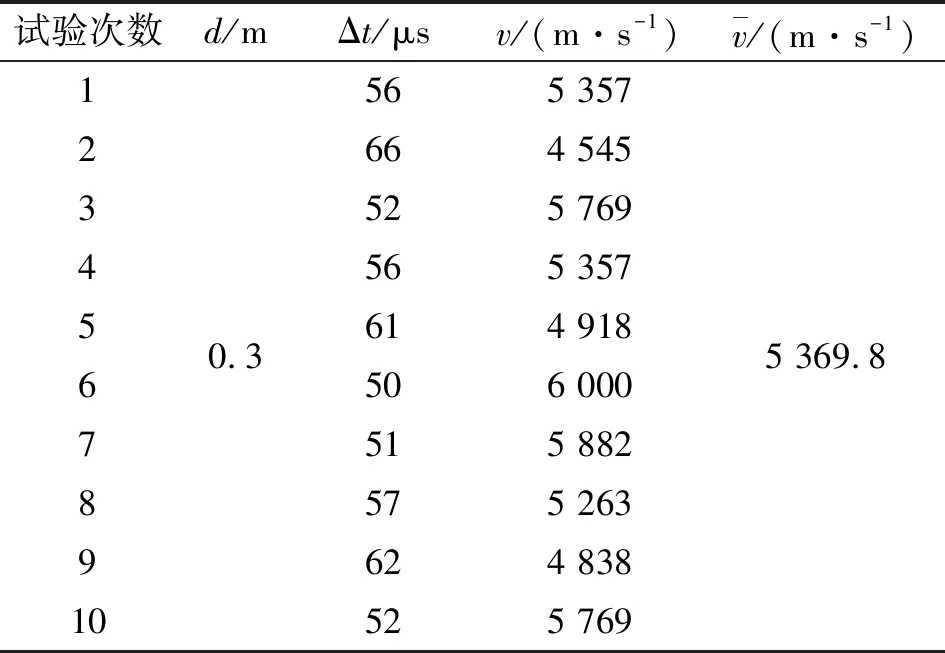
表1 波速计算结果
2.2 声发射源定位
声发射源定位实验在铝合金板中选定的区域进行,如图3所示。图中正方形阴影区域为监测区域,监测面积为600 mm×600 mm,在正方形的4个顶点分别布置4个声发射传感器,通过专用耦合剂与铝合金板表面紧密贴合。实验中,声发射信号由断铅实验模拟产生,断铅点位置坐标为(150,150),如图4所示。
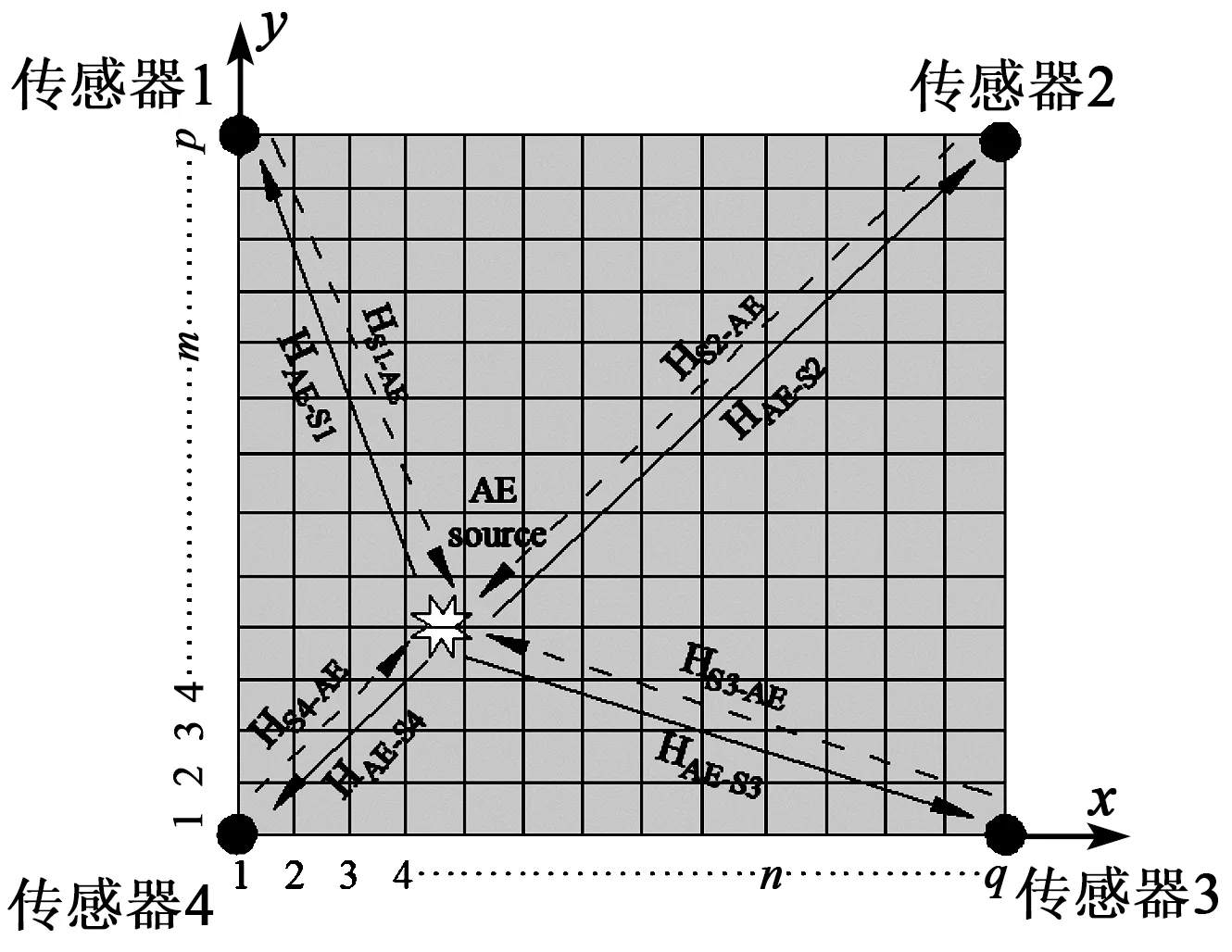
图3 传感器布置及监测区域示意图
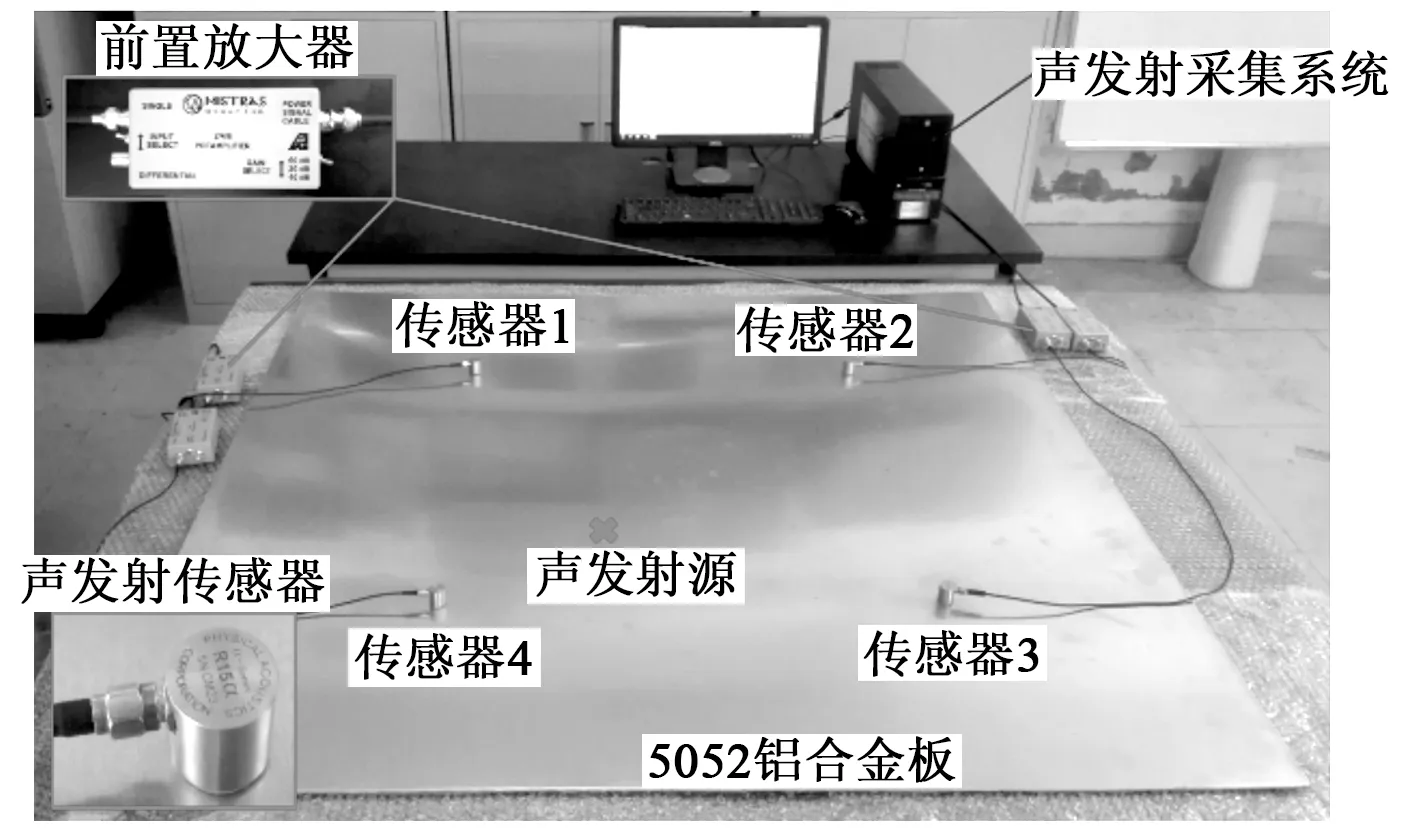
图4 声发射源定位实验图
传感器采集到信号的时域图如图5所示。由图可见,信号之间有明显的时间延迟,通过对信号进行时域的反转得到的结果如图6所示。按照时间反转理论,信号需重新发射回声源处,本文通过在计算机上进行虚拟重发的过程,根据定位成像的原理,将信号聚焦的幅值作为像素值以图像表示出来。
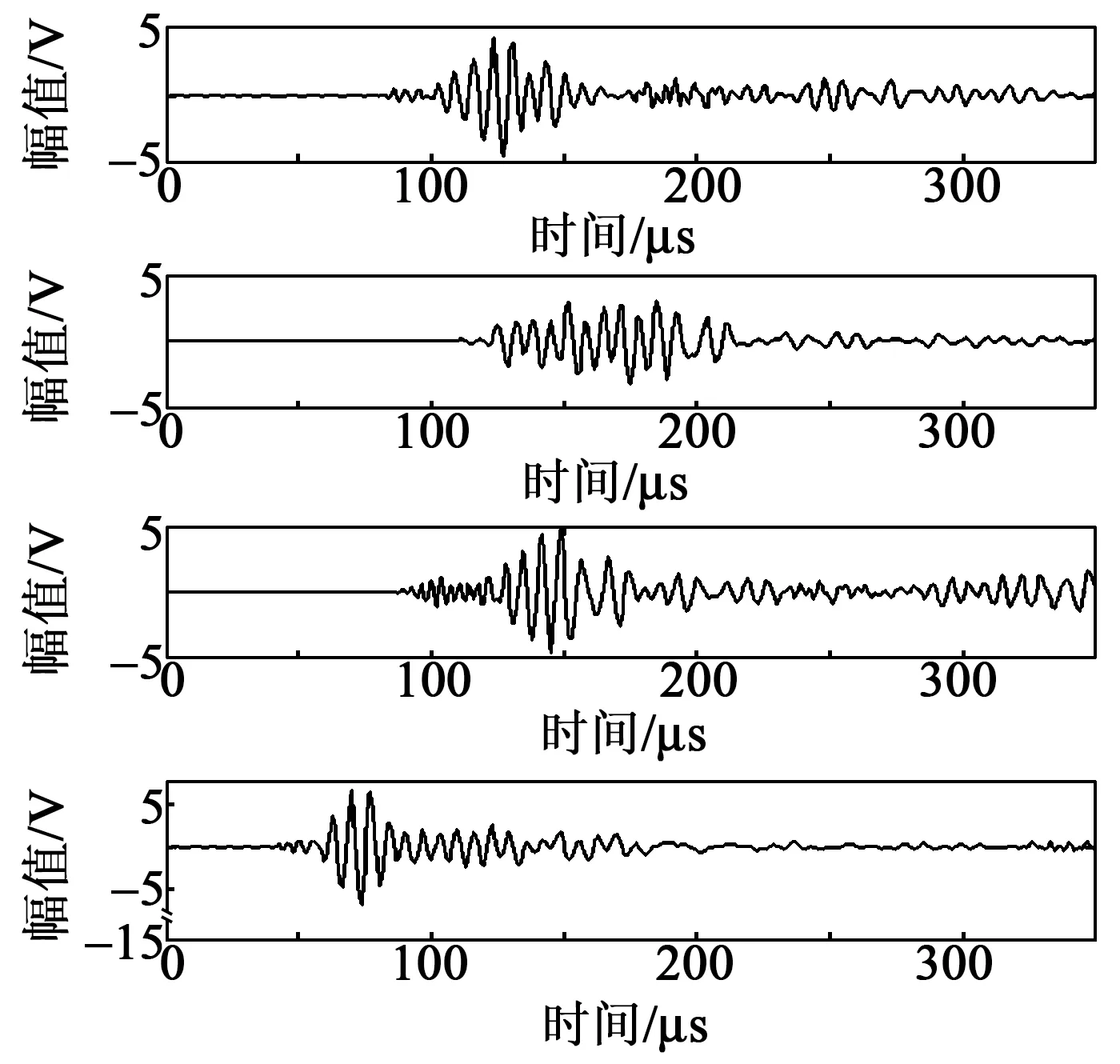
图5 4个传感器采集到信号的时域图
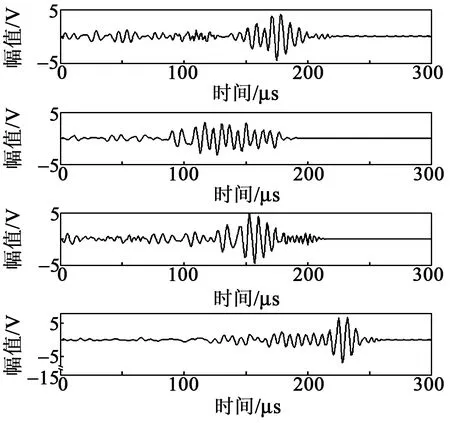
图6 时间反转后的声发射信号
3 定位结果与误差分析
根据定位成像的原理,声发射源的定位结果如图7所示。为了突出声发射源位置,对图像进行了阈值化处理以消除干扰数据。图8为阈值处理的结果。依据成像理论,监测区域图像中的像素最大值处表示声发射源,则图中的亮点位置即为声发射源的位置。依据时间反转法定位的声发射源坐标为(169.3,170.1),与实际声发射源位置相比,径向误差为27.8 mm。同时,为了验证结果的准确性,进行了多组实验,实验结果与误差分析如表2所示。
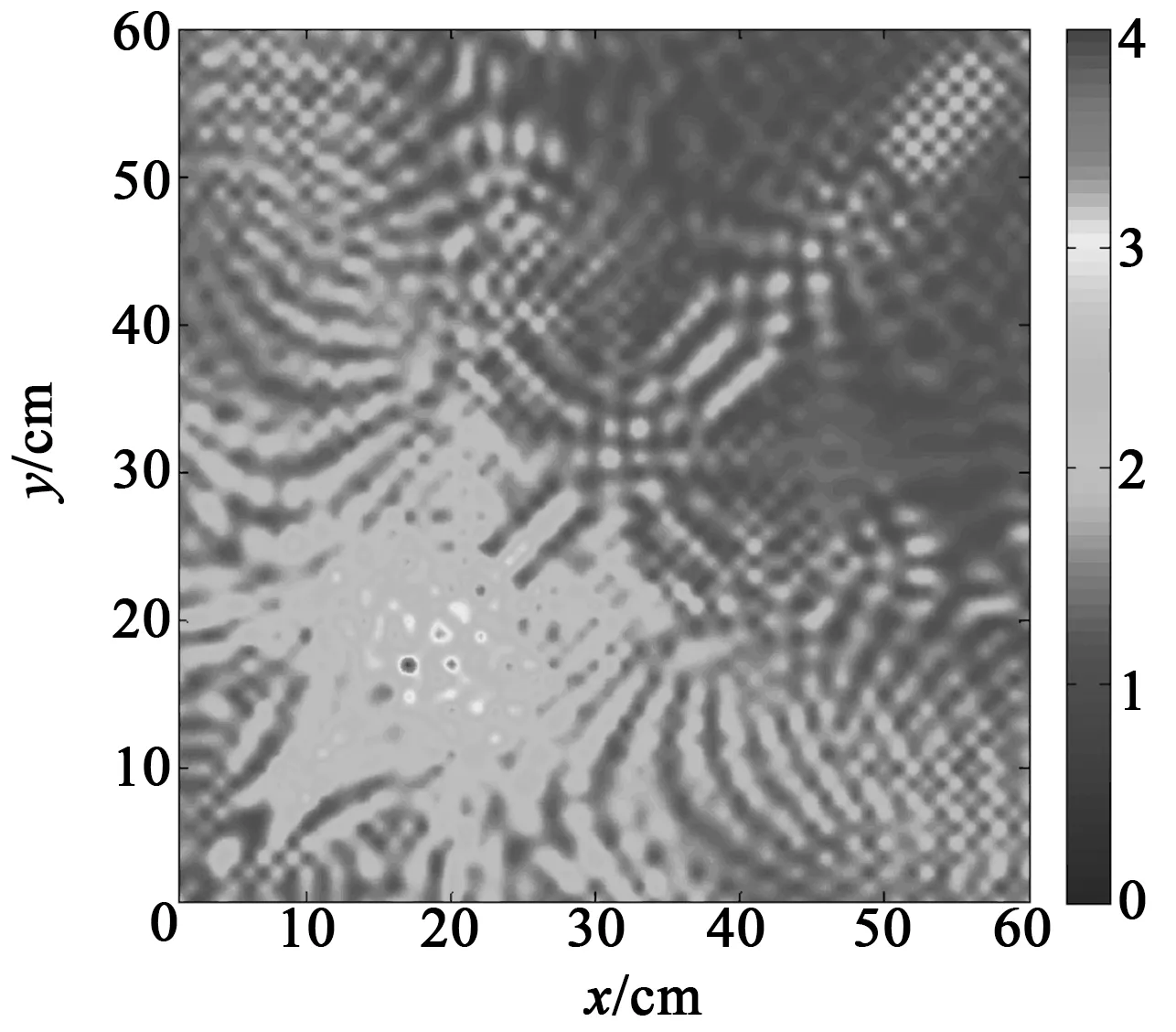
图7 铝合金板中声发射源的定位
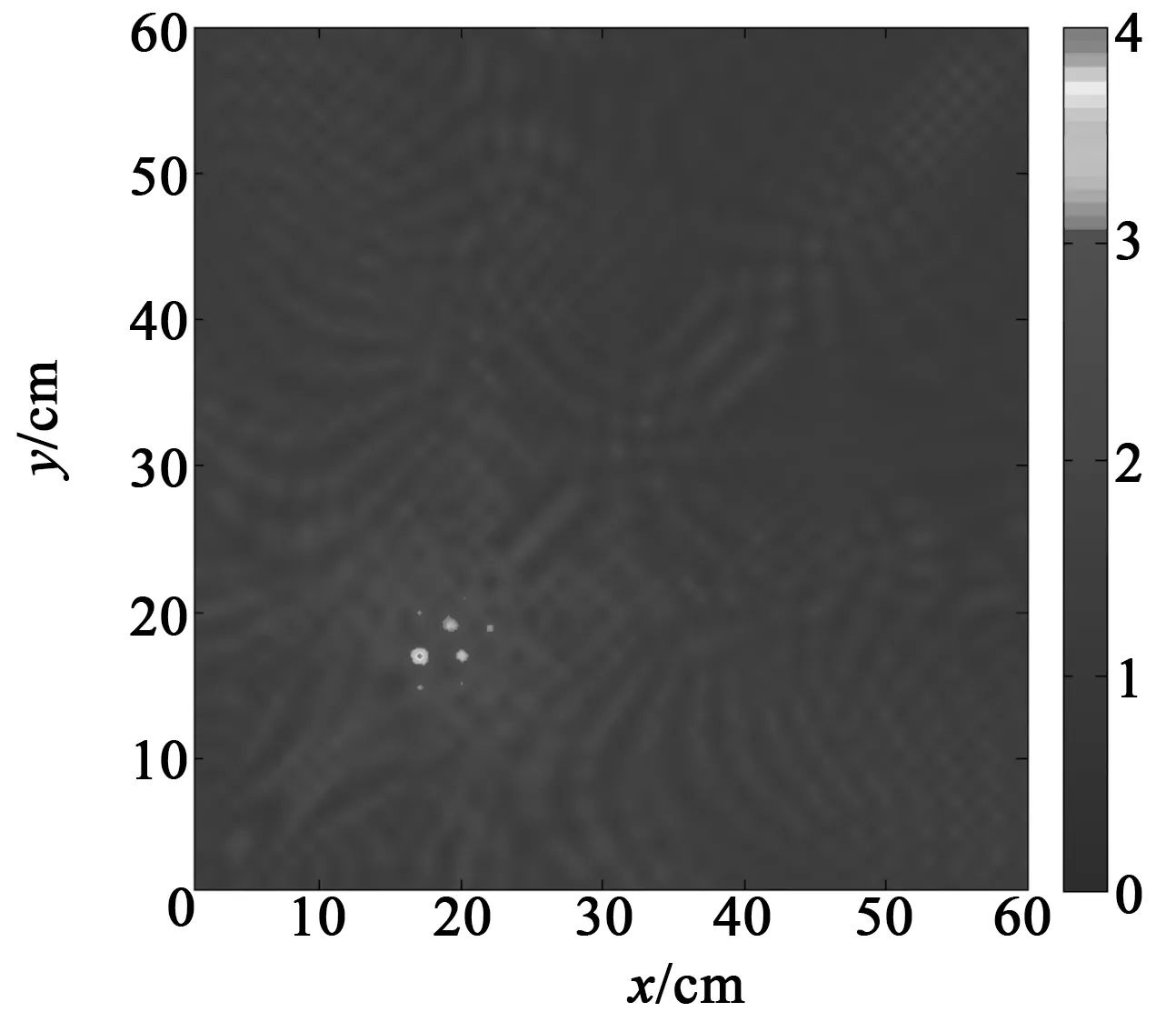
图8 阈值化处理结果
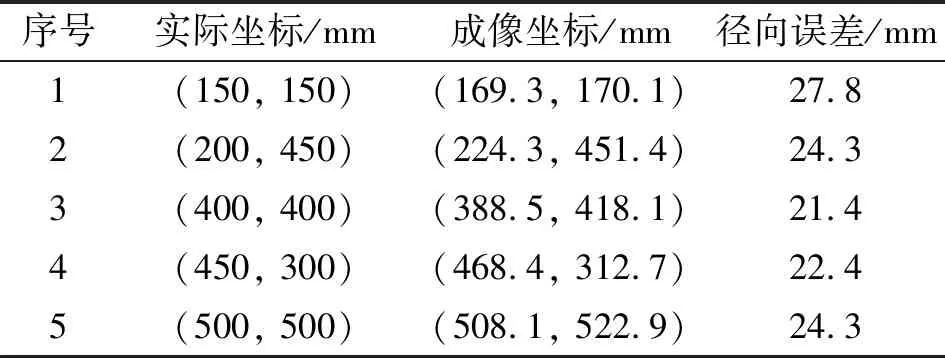
表2 声发射源定位结果及误差
由表2可见,本文方法定位到的声发射源坐标与实际的位置基本吻合,其误差的存在主要是采集到的信号中有来自板的边缘回波,但误差保持在可控范围内,能满足精度要求。
综上所述,通过本文提出的声发射源定位技术可实现对板类件的声发射源的定位,且具有较高的准确性和稳定性。
4 结束语
为了高效定位薄壁板件的声发射源,本文提出了基于时间反转法的声发射源定位成像方法。该方法通过在铝合金板上进行了实验验证,结果表明该方法能准确地定位声发射源位置。这不仅避免了复杂的数学计算,还提高了定位效率,定位结果通过二维图像表示,形象直观,简化了定位过程。
