液压伺服作动器与电动作动器性能仿真分析
2019-06-25韩占朋黄勇强杨振声邰瑞雪
邓 欢,韩占朋,黄勇强,杨振声,邰瑞雪
(航空工业洪都,江西 南昌,330024)
0 引言
目前三代飞机的作动系统都是通过液压驱动,随着飞机技术的发展,特别是军用飞机对液压系统提出了较高的要求,未来全电飞机将采用新型的电动作动器。传统方法设计飞机的作动系统主要是通过设计者的经验和计算报告,再通过实验来验证计算结果,这种方法设计周期长、验证成本高。随着计算机仿真技术的进步,在系统设计中使用仿真软件对系统进行动态特性的仿真,在计算机上进行试验验证,参考物理系统的各个工作状态,从而设置最佳的匹配参数,这样就可以在实物制造前避免设计缺陷。仿真设计方法设计周期短、设计成本低,已在飞机设计中得到广泛应用。本文主要通过仿真分析液压作动器和电动作动器在性能方面的不同特点。
飞机伺服作动系统是飞机的重要系统,它直接驱动飞机各个舵面的偏转,而作动器是作动系统的关键,作动器的性能直接影响到飞机的性能。本文使用Simens公司的AMESim仿真平台针对液压作动器和电动作动器进行建模仿真,对作动系统进行动态仿真,并分析仿真结果,为飞机作动系统设计及分析提供参考。
1 AMESim平台介绍
AMESim仿真平台是1995年推出的多学科物理建模平台,该软件使用图形化的建模开发环境,为流体、机械、控制、电气、磁等工程提供了完善的联合仿真解决方案。首先,该软件提供了丰富的元件模型库,工程师可通过元件库按照系统原理搭建理想的物理模型,同时还可以根据实际的工况考虑温度、能量损耗、电压降低等因素对系统的影响搭建较精准的物理模型。图形化的建模方案不需要推导复杂的数学公式,可以节省工程师数学建模所花费的时间,使工程师专注于系统的设计。其次,AMESim的智能求解器能够根据工程师搭建的模型自动选择最优算法,同时该软件具有稳态仿真、动态仿真、批处理仿真、间断连续仿真等多种仿真方式,并根据不同仿真时刻动态的切换积分算法和调节积分步长以缩短仿真时间和提高仿真精度。最后,AMESim提供了规范化和图形化的二次开发平台,可以使用C语言开发自定义模型并以图形化的方式加入模型库中,除此之外,它还提供了丰富的软件接口,能与Matlab/Simulink,Adams等软件进行联合仿真。
2 AMESim仿真平台应用于飞机的作动系统
2.1 飞机作动系统的原理
飞机的作动系统就是将飞行员的指令通过控制器输出到作动器,作动器再驱动舵面偏转。飞机的作动系统是一个闭环的系统,舵面的位置信号会反馈到输入端,形成负反馈回路。作动系统一般包括作动器、反馈部件、放大器、舵面等。典型的作动系统原理图如图1所示。

图1 作动系统原理图
2.2 液压伺服作动器及作动系统建模
在AMESim软件的液压子模型库中选择相应的元件模型,模型库中集成有大多数的标准液压元件的仿真子模型。同时,系统中的特定元件模型可根据其物理结构自行搭建。一般的伺服作动系统模型如图2所示。

图2 液压伺服作动系统模型
搭建完成系统仿真模型后,仿真的关键就是模型参数的设定。在作动系统中对系统性能起主要作用的参数为作动器的活塞面积、活塞阻尼系数、摇臂长度、阀芯位移、流量等,液压伺服作动器工作原理如图3所示。
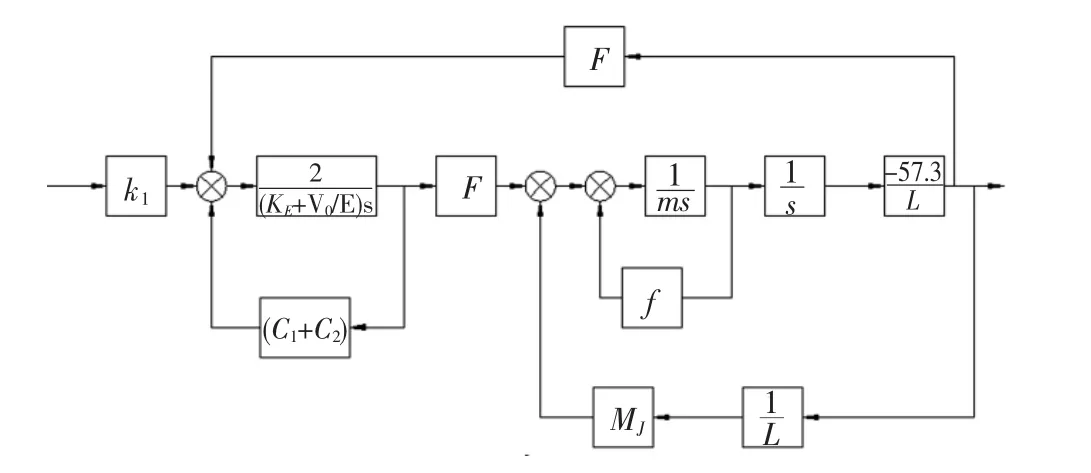
图3 液压作动器工作原理图
液压作动器的静态增益、时间常数和阻尼比公式为:

其中:F为作动器活塞有效面积,C1为伺服阀阀芯位移为常数时,输出流量q对压差p的偏导数,C2为液流系数,KE为液压管路的弹性系数,E为液压油体积弹性模量,f为活塞阻尼系数,L为摇臂长度,m为负载质量,K1为压差p为常数时,输出流量q对阀芯位移的偏导数。
设置模型中作动器活塞直径90mm,阻尼系数0.8,负载5000kg,管道弹性模量为2xPa,液压油体积弹性模量1700 MPa等。其他参数可根据实际情况进行设置。
在仿真时间0-2s内运行系统仿真,作动器活塞杆跟随输入信号的变化如图4所示,活塞杆加速度图如图5所示。
图4显示液压作动器在1-1.5秒之间输出能跟随输入信号,但在1秒附近出现了短暂的超调,跟随系统的输入速度较快。图5显示从0.5秒开始,活塞的加速度较快,能快速达到预设值,1秒左右出现反向运动即图4显示的在1秒左右出现的超调。仿真结果与实际工况基本吻合。
2.3 电动作动器及作动系统建模
电动作动器以电力为能源,通常由电动机、测速装置、位置传感器和齿轮传动装置等组成。使用AMEsim中信号库、机械库、电气库和电机驱动库搭建电动作动系统模型如图6所示。
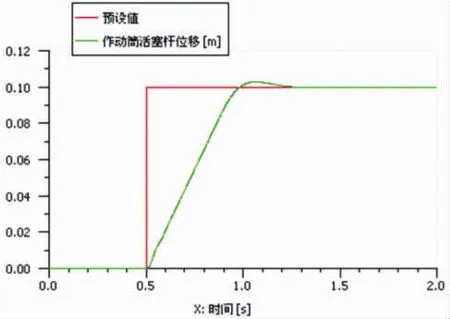
图4 作动器活塞杆跟随输入信号的变化

图5 活塞杆加速度
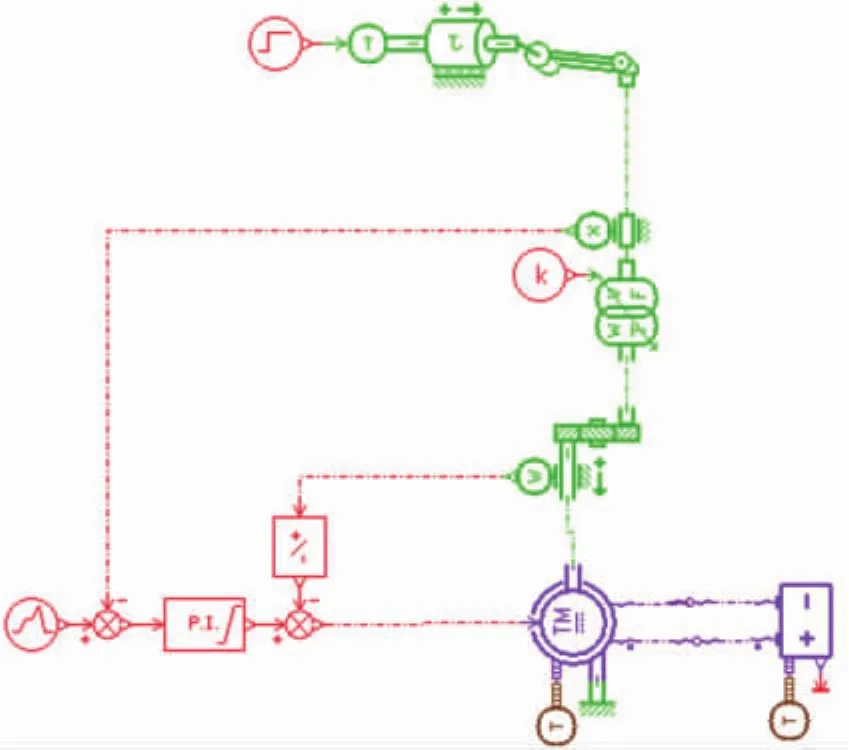
图6 电动作动系统
电机对系统起主要作用的是输出力矩和转速,同时舵面受到的铰链力矩与电机的参数要匹配。
图6为电动作动器在输入信号的作用下,随输入信号变化的情况,可以看出,电动作动器在1s内能达到预设位置,并能很好的保持。图7为舵面偏转随时间变化的曲线,舵面的偏转角度和图6作动器活塞位移变化规律一致,与实际工况相符。

图7 电动作动器活塞位移输入输出
3 结论
AMESim能为工程师提供一个效率高且方法简单的仿真平台,图形化的建模方式避免了公式推导,同时还可以支持多学科的物理建模,不必使用多个专业软件。仿真结果与实际工况相符。通过对比液压作动器和电动作动器的性能可以发现,电动作动器相应速度快且稳定,不会出现像液压作动器超调的现象。电动作动系统结构简单、性能稳定。随着全电飞机技术的发展,电动作动器将会广泛使用在未来的飞机上。
