自动烹饪粉面装置的设计与试验
2019-06-22陈熵,袁真,汪鹏,李旭,2
陈 熵,袁 真,汪 鹏,李 旭,2
(1.湖南农业大学工学院,湖南 长沙410128;2.南方粮油作物协同创新中心,湖南 长沙410128)
粉、面是我们生活中常见的食物,粉类的品种多样,如:湖南米粉、桂林米线、柳州螺蛳粉[1]等深受国人偏爱。根据2018年数据统计,单一品种螺蛳粉目前已在北京、上海、广州、深圳、长沙、柳州等城市有超过5000家门店,营业额已超50亿元[2]。面,为国人的主食之一,其的种类有几十种之多,民间将武汉热干面、北京炸酱面、山西刀削面、兰州拉面、四川担担面并称为“中国五大面食”[3],因此,既美味又饱腹的粉面,成为了国人生活中必不可少的一部分。
粉、面有着共同的烹饪方式——将其在高温的锅中煮熟后加工成美食。通过观察人们的烹饪方式发现,煮熟的过程往往是制作美食中耗时较长的一个环节,同时烹饪的工艺较为单一,具有较强的重复性。随着科技不断进步,自动化设备已经渐渐走入人们的生活[4]。烹饪机构也在逐渐代替传统人工。通过观察与分析,人们煮粉面的过程通常可分为:下锅、翻煮、出锅三个精简的步骤,因此本文设计了一种自动烹饪粉面装置,代替人工,实现粉面烹饪的自动化。
1 自动烹饪粉面装置的结构设计
本研究设计一种自动烹饪粉面装置,装置分为:机械臂、温控煮锅[5]、滑槽漏勺三个部分,如图1所示。机械臂为此装置的主体部分,为一个具有两自由度的机构系统。该系统由抬臂机构和旋臂机构两部分组成。其中,抬臂机构可实现粉面烹饪过程中的下锅、出锅控制;旋臂机构可实现将粉面在锅中的翻煮和出锅后倒入预备容器的控制。
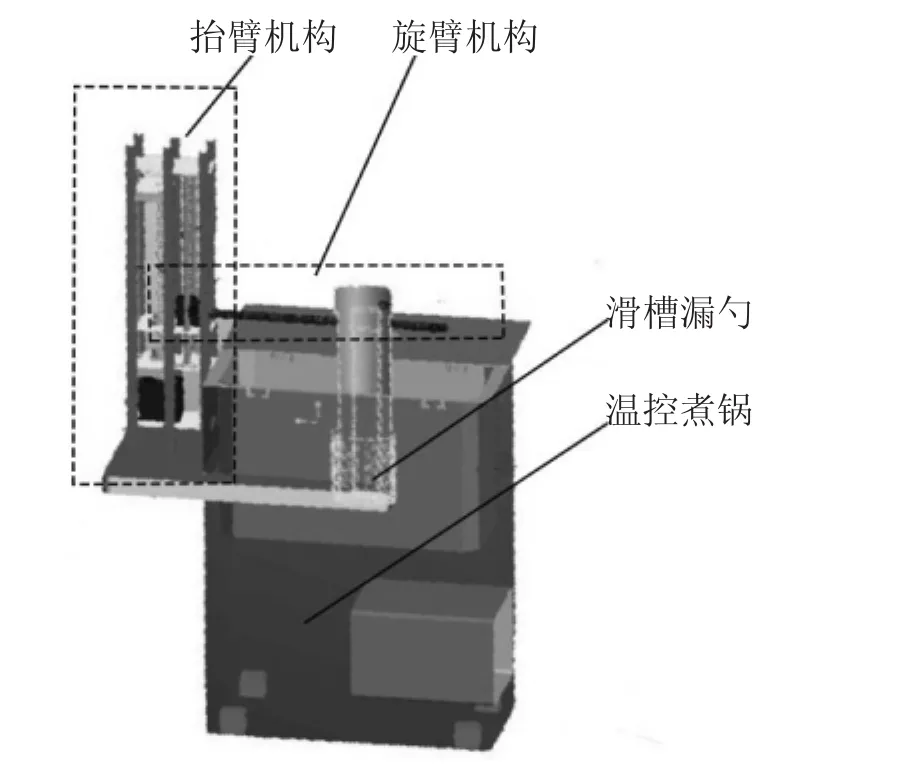
图1 装置结构示意图
1.1 抬臂机构的设计
自动烹饪粉面装置的抬臂机构为竖直状态下的丝杆滑台,其外部框架由铝型材结构加固而成,组成部分包括:丝杆、电机、滑轨、滑块四个部分。抬臂机构的动力主件为步进电机及其同轴的滚珠丝杠,将步进电机的旋转运动转化成滚珠丝杆上的滑块机构直线运动,这种转化实现升降平台在竖直方向上进行运动并精准定位。
该装置的滑块进行升降动作时,要求每次移动的距离控制精准,因此采用滚珠丝杠规格为R1605滚珠丝杠,其直径为16 mm,行程为390 mm,丝间导程为5 mm。装置导轨为三根直径为10 mm的光轴所组成。因此抬臂机构具有负载能力高,运动精准等特点。
1.2 旋臂机构的设计
设计装置的旋臂机构负载于抬臂机构的滑块上,可随抬臂滑块运动。旋臂机构由悬挂电机及悬臂杆所构成,悬臂杆一端与悬挂电机同轴,随电机转动而转动,另一端垂直安装漏勺,因此悬臂电机可精准控制漏勺的旋转。悬臂杆的长度依据力的分析及加热锅体的尺寸需求来确定。确保漏勺下降位置不与锅壁接触,保持粉面在锅中能充分受热。本装置采用悬臂长度设定为430mm,内径为6.38mm,与悬臂电机用联轴器链接。
1.3 滑槽漏勺的设计
该装置的滑槽漏勺主体为镂空圆柱体结构,通过悬臂杆连接器竖直装配在悬臂杆上。在圆柱形漏勺上端增加一段滑槽,能实现粉面出锅后,直接倒入具备容器中,如图所示2。粉面完成烹饪后,悬挂电机转过一定角度使滑槽倾斜,粉面从漏勺中沿着滑槽滑入容器。根据整体装置的结构设计,滑槽漏勺总长设定为480 mm,漏勺高度为150 mm,底面半径为65mm,悬臂杆上悬挂的滑槽漏勺个数可根据用于需求设定。
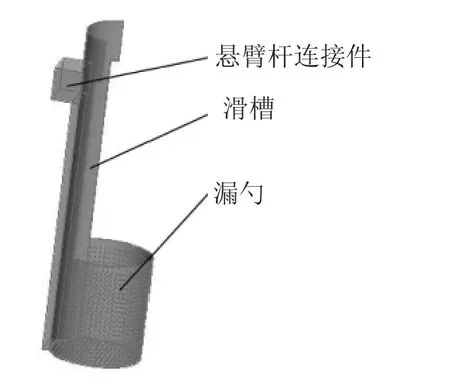
图2 滑块漏勺示意图
1.4 温控煮锅的设计
温控煮锅的设计是一种基于电加热器及温度传感器的水温控制系统。煮锅的温度是可以人为设定的,通过温度传感器的检测,当设定温度高于实际温度时,电加热器开始工作,使得水温开始升温,当设定温度低于实际温度时,电加热器停止工作,通过系统反复的控制电加热器的使能,从而保证锅内水温一直停留在设定温度上。装置设定的最高加热温度为100℃。
温控煮锅的顶部设计一块可移动平台盖,平台盖的结构为互锁类型的滑道。当装置处于非工作状态时,平台盖充当煮锅的防尘盖;当装置处于工作状态时,平台盖通过滑道向外滑出,可在其上放置预备容器,待粉面烹饪完成后,粉面通过滑槽漏勺滑入放在平台盖上的容器中。
2 装置的控制电路设计与程序设计
自动烹饪粉面装置的工作执行元件为:抬臂电机以及悬挂电机,根据实际功能需求,本装置的控制系统为基于STM32系列单片机的步进电机控制系统[6],具有控制方便、精度高、扭矩大、耐高温等特点。
2.1 控制系统硬件电路设计
本研究采用电极片控制步进电机驱动的方式对抬臂机构和旋臂机构进行控制。悬挂电机为60步进电机,抬臂电机为86步进电机,其步距角都为1.8°。步进电机旋转一圈的脉冲数为360°除以步距角,因此步进电机旋转一圈需要360°/1.8°=200个脉冲。
由于抬臂电机转一圈丝杠前进一个导程,本装置丝杆导程为5 mm,丝杆导程为390 mm,因此抬臂滑块运动的最长路径需要15600个脉冲。脉冲信号为单片机模块所产生的PWM信号,由于步进电机不能直接接脉冲信号,只能接收分时供电,因此单片机产生的脉冲信号先传给电机驱动模块,电机驱动模块再将其转化的控制信号传给步进电机,驱动步进电机旋转。电机驱动模块以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的,其设计电路如图3所示。
2.2 控制系统程序设计
本研究采用STM32系列单片机作为核心控制单元,对数据采集与驱动控制,实现滑槽漏勺的精准控制和煮锅的水温调节。由于驱动电机的当前位置没有断电记忆功能,在机器断电后,每次重启都需要通过固定程序实现装置的初始化。初始化功能的实现是通过抬臂电机及旋臂电机依次向坐标原点方向进行旋转,直至触发原点位置的行程开关,并及时停止相对应的电机。装置的程序流程是依次实现并紧密配合的,程序流程图如图所示4,工作步骤大体可分为:加热锅中水温、下锅、翻煮、出锅四个步骤。
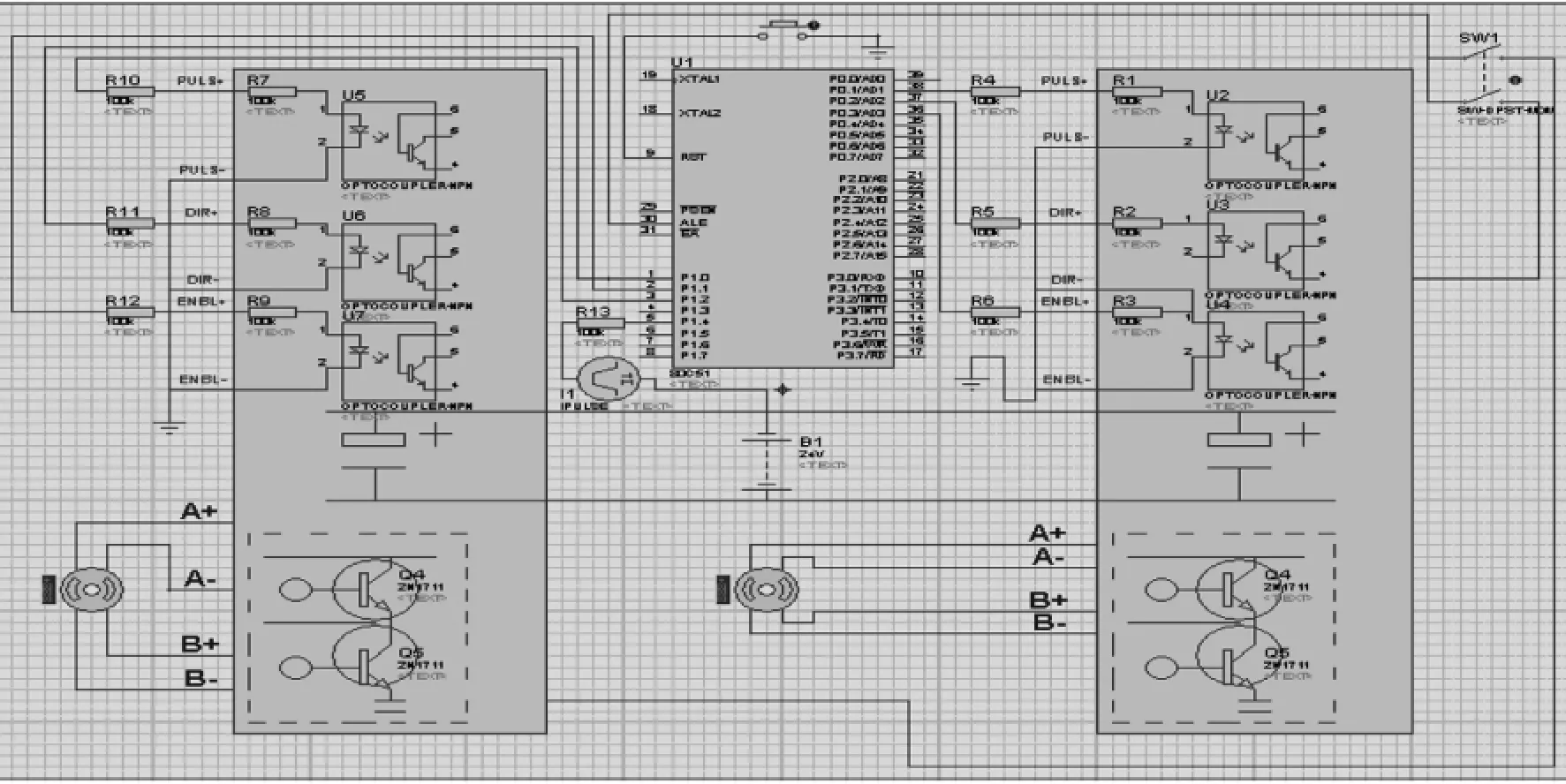
图3 电机驱动电路设计图
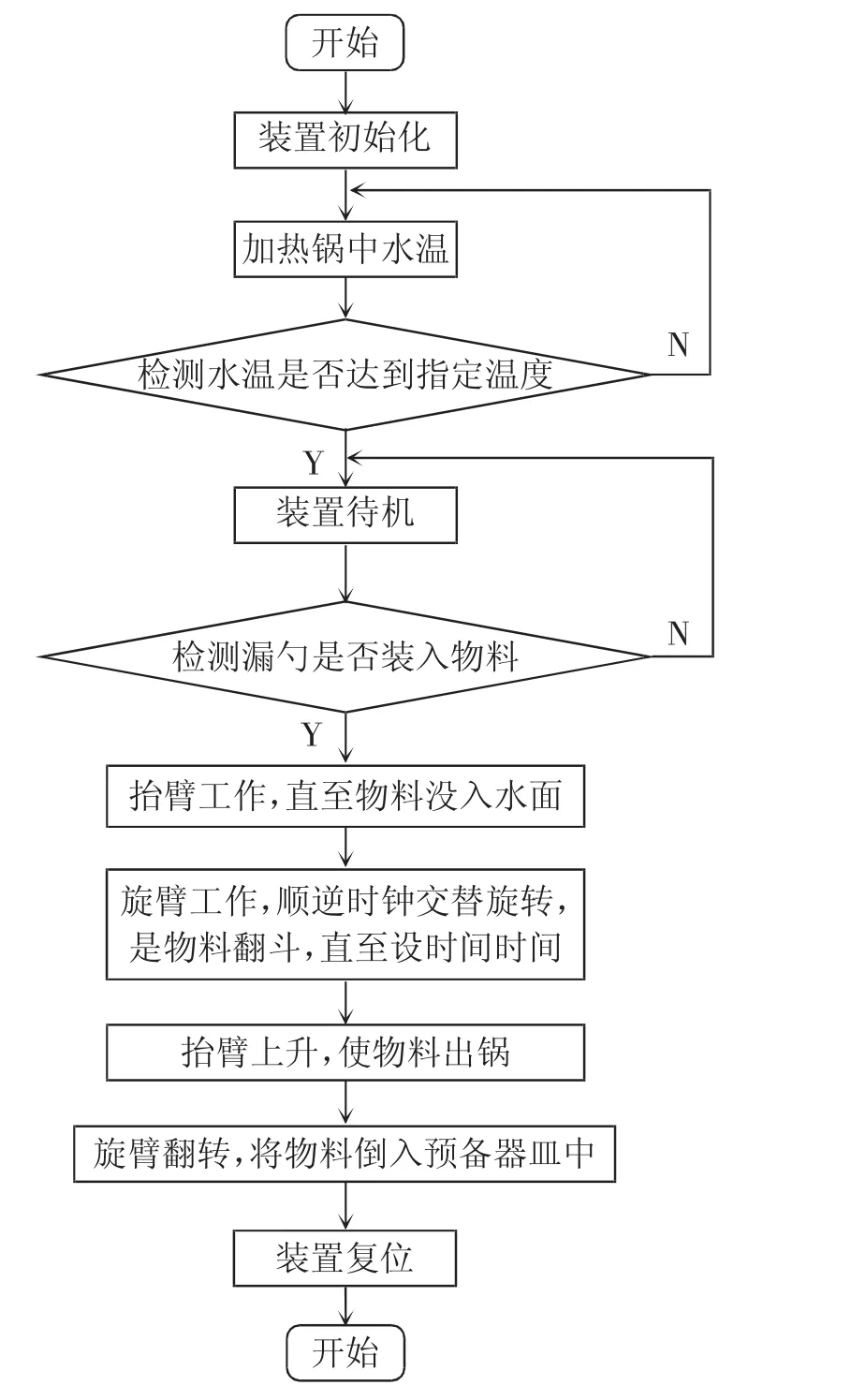
图4 程序流程图
3 试验与调试
通过程序设计研究,装置的工作步骤可分为:加热锅中水温、下锅、翻煮、出锅等。通过研究发现,不同品种的粉面对水温的要求不同,对煮熟的时间要求也不同。以湖南米粉的为例(粉的种类为指宽扁状态型米粉,长度为20~30 cm),在80℃的煮锅中煮40 s左右,米粉便可煮熟,同时口感也是最佳状态。本文以湖南米粉为例,对机器的主要参数进行了调试。
当设定温度开始达到80℃后,抬臂机构才可开始工作,水温在升高的同时,将需烹饪的米粉放入滑槽漏勺。
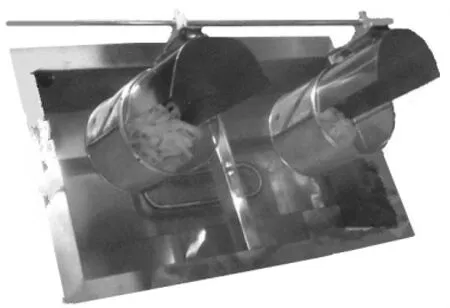
图5 下锅前状态图
当米粉完全浸泡入水后完成了下锅动作,此时抬臂电机将停止工作,旋臂电机将开始工作。
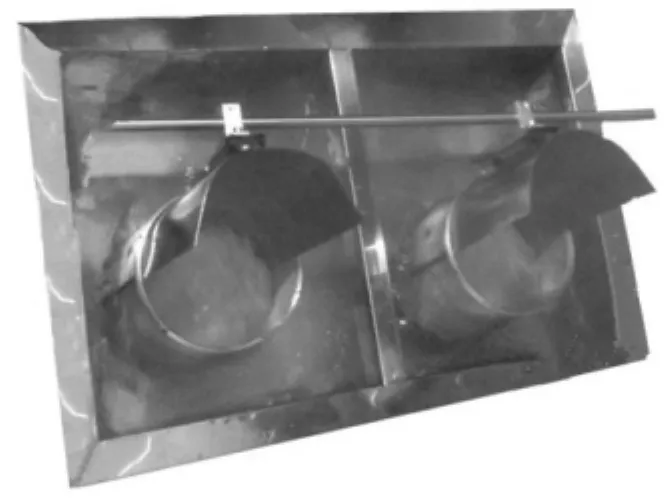
图6 煮粉状态图
为了防止米粉在锅中煮的过程中相互粘连,因此需要通过悬臂电机的运动,实现翻抖,经过研究发现,漏勺在锅中进行50度左右的顺、逆时针旋转、转速为0~20圈每分钟较为合适,米粉不会粘连,同时有效防止水溅出锅外。
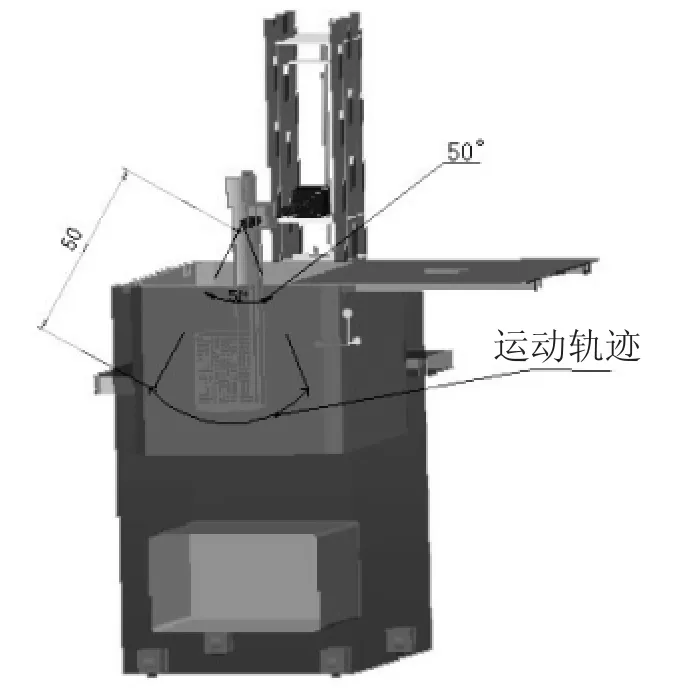
图7 漏勺翻斗示意图
米粉在锅中翻煮40秒后,便可出锅,出锅过程为抬臂电机上升至指定高度后,悬臂电机顺时针进行旋转,直至漏勺中米粉,反向顺着滑槽倒入事先具备的容器中。
4 结语
本研究设计了一款自动烹饪粉面装置,可机器代替人工实现粉面下锅、翻煮、出锅的过程,经过对湖南米粉的试验检测,确定了多项研究参数,为自动烹饪粉面装置的后续生产研究提供依据。
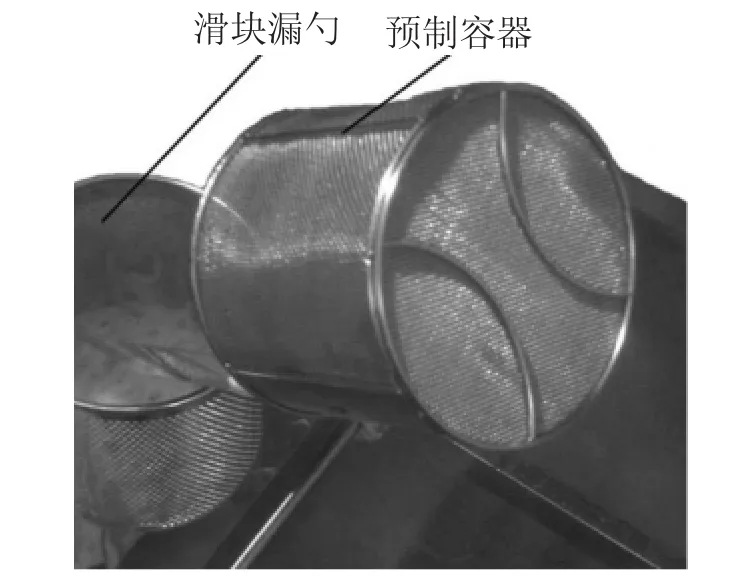
图8 米粉出锅倒置状态图
