果蔬采摘机器人的研究现状与对策分析
2019-06-22敖茂尧
敖茂尧
(广西职业技术学院,广西 南宁530226)
0 引言
随着科学技术的发展,机器人技术已经广泛应用于国防、科技、工业、农业等各个领域,由于在传统农业生产中,一方面对农业人口的依赖问题日益突出,导致劳动力成本上升,另一方面传统农业机械对果蔬的损害、环境的污染影响非常严重,为此如何提高农业生产的机械化、自动化、智能化水平成为当前需要解决的关键问题。当前世界各个国家高度重视农业机器人的发展,它们不仅能够在艰苦的环境下完成连续、重复、单调的体力劳动,而且可以开展作物灌溉、精准施肥、蔬果采摘等精细化操作,极大地提高了生产效率与经济效率,成为了智能农业与精准农业关键装备之一[1]。
采摘机器人是未来智能农业机械的发展方向,集电子技术、智能技术、机械工程、计算机工程、农业科学与生物科学等为一体的智能装备,主要针对水果与蔬菜的采摘、搬运、分拣、码垛、打包等方面的作业任务。开展采摘机器人的研究,不仅对于降低劳动强度,提高生产效率有着积极的作用,而且对于加快我国的农业现代化水平有着重大的意义。本文针对采摘机器人的现状与对策研究将有利于进一步梳理农业机器人发展过程中存在的问题与制约因素,并为果蔬采摘机器人的未来发展提供了解决思路,具有重要的意义。
1 果蔬采摘机器人的特征分析
1.1 采摘对象个体特征多样化,生长环境差异大
果蔬的种类很多,外形、颜色、大小以及重量上的差别很大,且容易损坏,为此,采摘机器人在作业的时候一是根据果蔬的特点自适应调整机械手的大小,二是需要控制抓取的力度,以保证果蔬的品质。此外,果蔬的生长受到天气、土质、温度、湿度等多方面的影响,其生长环境差异化很大,对采摘机器人的工作提出了更加高的要求[2]。
1.2 采摘作业环境非结构化,作业动作复杂
在采摘过程中,作业环境对于采摘机器人的抓取有着重要的影响,由于果蔬的分布具有随机性,容易受到树枝、树叶等遮挡,这种非结构化的环境对于采摘机器人的动作要求就更加的精准和复杂,尤其是在果蔬识别、定位、抓取等方面具有更高的智能化。
1.3 采摘机器人具有通用性与可拓展性
由于采摘机器人的操作对象多样化,一方面要求采摘机器人具有良好的通用性,能够满足大多数果蔬采摘的日常工作需求,另一方面要求采摘机器人具有拓展性,通过改变软件或硬件的功能满足果蔬差异化特点。
2 果蔬采摘机器人的研究现状
当前采针对摘机器人的研究已经成为了世界各国的研究热点,欧美、日韩及我国相继研究了苹果、番茄、橘子等智能机器人,从目前的研究成果来说,采摘机器人主要由采摘机构、末端执行装置、视觉系统、移动装置和控制系统等组成。
2.1 苹果采摘机器人
韩国庆北大学研制的苹果采摘机器人具有四个自由度,首先通过CCD摄像头与光电传感器组合的方式进行果实识别,然后通过三指夹持器对目标果实进行抓取,内部的压力传感器能够有效避免对果实的损伤,最后通过安装在机器人手臂的末端的收集袋进行果实收集,通过实验测试表明苹果的识别率达到85.5%,速度达到6个/分钟,但是由于该机器人自由度只有四个,导致对于茎叶部分的苹果无法进行抓取。见图1。

图1 苹果采摘机器人
2.2 番茄采摘机器人
清华大学开发的番茄采摘机器人具有五个自由度,由机械手、执行器、行走装置、视觉装置和控制系统组成。该机器人首先通过红色与绿色的视觉差别对果实进行辨别,然后通过三维实现对果实的定位,最后由机器手进行抓取,实验表面该机器人的番茄识别率达到88.5%,速度达到8个/分钟,由于该机器人不是全自由度,导致操作空间受到很大的限制,另外机械手比较坚硬容易损坏果实[3]。见图2。

图2 番茄采摘机器人
2.3 橘子采摘机器人
西班牙科技人员发明的橘子采摘机器人,具有七个自由度,首先利用彩色摄像头和图像处理卡组成的视觉系统来辨别成熟果实,然后通过橡胶手指与气动吸嘴抓紧果实,接着利用机械手把橘子与果树进行分离,行走装置由履带组成,可以通过传感器检测设置在田间的反射板判断到达田埂。该机器人从识别到采摘成功率70%左右,速度4个/分钟,由于成熟的橘子主要位于茎叶茂密的地方,机器手无法有效避开障碍物。见图3。

图3 橘子采摘机器人
2.4 黄瓜采摘机器人
中国农业大学研制的黄瓜采摘机器人,具有六个自由度,主要由采摘机器臂、视觉识别系统、移动装置、柔性末端执行机构和电源模块组成,首先采用RGB模型进行图像分割,根据特征提取出黄瓜的采摘点,接着末端执行机构利用简单的开合动作减掉黄瓜,该机器人采摘成功率80%左右,速度3个/分钟。见图4。
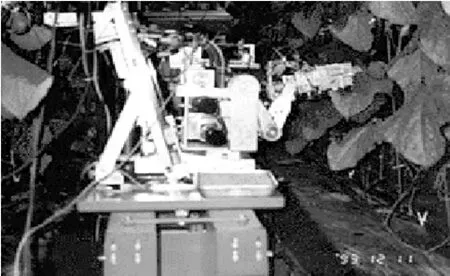
图4 黄瓜采摘机器人
2.5 草莓采摘机器人
上海交通大学研制的草莓采摘机器人,以OHTA的颜色空间图像分割方法为手段,通过背景分割出草莓的形状,然后借助草莓二值图来判断其姿态与成熟度,最后根据成熟度进行选择性的采摘,实验证明该机器人的判别准确率达到90%左右,判别速度30个/分钟,采摘果实的损坏率10%,能够满足果实采摘速度与精度的要求[4]。见图5。

图5 草莓采摘机器人
3 果蔬采摘机器人的存在问题
从上述的研究现状来说,采摘机器人已经在草莓、黄瓜、橘子等多种果蔬方面取得了显著的成效,但是还未真正达到替代人类完成采摘任务的要求,在采摘机器人的发展过程中还存在一些关键因素制约其发展,笔者认为存在问题如下。
3.1 果蔬机器人的辨识与定位效率不高
为了完成采摘作业,采摘机器人首先要具备对果蔬类型进行准确辨识的功能,并能够区分成熟果蔬与非成熟果蔬之间的差别。目前主要采用灰度阈值法、形状特征法和颜色色度法等方法,其中灰度阈值法与颜色色度法是基于光谱反射特性对果蔬进行判断,这种方式获得的图像容易受到光照的影响而产生图像噪声,从而影响了辨识准确率;形状特征法是基于果蔬外形能够形成完整边界为条件的一种定位方法,在作业过程中,受果蔬的生长环境的影响,果实与茎叶经常重合在一起,为此捕获完整的边界非常困难,不能有效区分果蔬的具体形状特征。由此可见,采摘机器人对果蔬的辨识与定位是影响抓取效率的关键因素[5]。
3.2 果蔬机器人的抓取避障与采摘率不高
在果蔬的抓取过程中,采摘机器人处于一个非结构化的采摘环境中,果实不仅相互重叠,而且果实被树枝、树叶遮挡,采摘机械臂和机械手的自由度与灵活性是决定否能进行成功避障的关键因素。此外,受到运动控制程序、图像处理算法、机械结构等方面的影响,大多数的果蔬机器人的采摘效率较低,如采摘机器人1分钟可以收获5个草莓、6个柑橘、3个黄瓜、8个番茄、6个苹果,如何提高作业效率是采摘机器人发展的关键问题之一。
3.3 果蔬机器人的制造与维护成本较高
与工业机器人相比,果蔬机器人的工作环境更加复杂、多样,受到天气与作物生长环境的影响,为此其机械结构、控制系统、行走装置等更加的复杂,制作成本也更高,研制与开发的周期也很长。果蔬机器人作为一种高精度、高智能、高科技的智能农业装备,设备的维护与保养的技术水平与费用非常昂贵,如何降低研制周期,减少维护费用是采摘机器人发展的关键问题之一。
4 果蔬采摘机器人的研究对策
上述研究可见,在果蔬采摘机器人的发展过程中,存在目标识别不准确,定位不精准,避障效率低,生产维护成本高等问题,为此,笔者结合农业机器人未来发展的方向,给出以下建议。
(1)研究基于多传感器融合技术的智能化图像处理算法,提高果蔬采摘机器人的辨识精度与感知能力在采摘机器人的视觉感知过程中,无论是采用单摄像头、双目摄像机、超声波测距仪等检测装置,都是为了准确辨识出目标果蔬类型。为提高识别精度,可以在研制过程中采用视觉传感器与非视觉传感器相结合的方式获取果蔬图像的时域和频域信息,然后将深度学习、模糊、遗传等算法应用到图像处理中,研发出具有自适应学习能力的智能化图像处理算法,提高采摘机器人的感知能力与定位精度。
(2)研究机器人运动控制与路径规划,提高果蔬采摘机器人避障能力与收获效率
采摘机器人的运动控制与路径规划需要根据系统自身特点与采摘要求来决定,在未来的研究中,需要对采摘机器人进行运动学和动力学的数学建模,通过运动仿真分析验证模型参数的最优化,通过研究路径跟踪控制算法,及时补偿机器人运动过程中目标位置偏移的问题,确保位置跟踪误差在合理范围内,最终提升果蔬采摘机器人避障的成功率和收获果实的成功率。
(3)研发模块化的开放控制系统,提升果蔬采摘机器人的扩展柔性,降低开发成本
当前采摘机器人采用专门的机械结构、控制系统和程序语言,这种封闭式的方式不利于机器人功能的扩展延伸。为此,可以将采摘机器人的功能进行细分,按照统一的规范与标准,构建以模块为子单元的控制装置,通过更换不同自由度的机械部分或控制装置适应不同类型的果蔬。可见,这种具有良好通用性、可拓展性的方式不仅能够快速构建新的机器人采摘控制系统,而且大幅度减少了开发的费用与维护成本,极大地提高了采摘机器人的灵活性与柔性。
5 结束语
本文详细分析了采摘机器人的特点、现状及影响因素,有针对性的提出通过开展多传感器融合技术的智能化图像处理算法、机器人运动控制与路径规划、模块化的开放控制系统等方面的研究,提高果蔬采摘机器人的辨识精度、避障能力与收获效率,满足个性化发展需求。未来,我们将继续努力提升机器人的机械化、智能化、精准化水平,使其为我们更好的服务。