无碳重力灯的结构设计及计算
2019-06-22沈钰超杨金林李梦雪庞佳丽
沈钰超,杨金林,李梦雪,庞佳丽
(浙江理工大学机械与自动控制学院,浙江 杭州310018)
1 相关背景及研究目的
在电能还没完全普及的今天,有很多地区的夜晚是黑暗的,人们非常需要电能,此时没有火力、水力、核能发电的条件下,身边有一个唾手可得的能源——重力,用重力转化为电能供人们使用,意味着有重力的地方,就有光,可以解决贫困地区的照明问题,为当地居民带来更多方便。
与此同时,重力灯的使用符合人们低碳环保的理念,作为停电时的应急灯或者替代消耗能源的灯使用也具有非常重要的意义。
为了践行这一理念,世界上许多人都对重力的利用做出了相应的努力:
比如在“新手发明者大会”(GGC)上,美国一名研究生发明的“重力电灯”获得了二等奖。“重力电灯”依靠重力产生电力,其亮度相当于一个12W的日光灯,使用寿命可以达到200年。来自美国弗吉尼亚州的克雷-毛尔顿,他的研究课题是一种使用发光二极管制成的灯具,这种灯具被命名为“格拉维亚”,它事实上是一个高度略大于4英尺(约1.21 m)、由丙烯酸材料做成的柱体。这种灯具的发光原理是:灯具上的重物在缓缓落下时带动转子旋转,由电磁感应产生的电能将给灯具通电并使其发光[1]。
2012年12月,英国伦敦设计师马丁·瑞德福和吉姆·里弗斯已经开始为实现这样一款概念环保灯而努力了[2]。就现状来看,解决重力利用方法的核心问题集中在增速机构的设计上,已有的对重力的利用方案中,都是使用的多对齿轮组叠加或者是丝杠这类机构[3-11],使用这类机构确实能够达到很大的增速比,以此来实现将重物慢速下落转变为发电机高速旋转的过程,但是以上机构要么体积偏大,要么能量利用率较低,又或者重物单次下落所能使LED灯亮的时间很短。于是本文着眼于行星齿轮机构这一能达到极大增速比,并且传动效率也较高的机构,设计了一种新的重力灯。以此来提高能量的利用效率,延长灯的照明时间,同时还能劲量减小重力灯的体积。
2 无碳重力灯的总体设计思路
2.1 工作原理简介
无碳重力灯由输入机构、增速机构、发电机、LED灯组成,重力灯使用流程如图1所示,将重物悬挂至输入机构,通过增速机构增速,带动发电机发电,使LED灯亮起。

图1 重力灯使用流程图
2.2 设计方法
(1)根据功率进行发电机的选择。
(2)根据设计要求进行能量转化的计算,计算出重物质量范围。
(3)通过发电机的额定转速以及假定重物匀速下降求出增速器传动比。
(4)结合要求传动比,设计增速机构。
3 无碳重力灯的设计过程
3.1 无碳重力灯的设计参数
无碳重力灯主要设计参数如表1。

表1 无碳重力灯主要设计参数
3.2 发电机选择
根据无碳重力灯的设计参数知须8个0.06W的发光二极管才能达到照明要求,得出:

发光二极管的参考电流为:5mA~20mA,参考电压为:3.0~3.8 V,选择直流永磁电机FF-180PH作为发电机,电机参数如表2。

表2 发电机参数
3.3 重物质量范围计算
从发电机参数中得出Pe=0.51W,设计参数中灯亮时长为15min,得出发电机所需的功为:

传动损耗可大致计算,增速机构确定后再经总体机构正算对设计参数进行微调,由参考文献[12]可知弹性联轴器的效率η1=0.99,行星轮系传动效率为η2=0.90,链传动效率为η3=0.96。
可求出重力势能需提供的能量为:

Wg=mgh,由设计参数得知h=1.8m,取重力加速度g=9.8 N/kg,可以算出质量

3.4 增速机构主要参数确定
由设计参数可知输入端链轮直径为d=32 mm,高度h=1.8 m,下落时间为t=15 min,可求出输入端转速为
由发电机参数可得,ne=10 500 rpm,可知传动比
根据以上计算结果,增速机构的主要设计要求如表3所示。

表3 主要设计要求
3.5 传动方案及机构原理图
NGWN(Ⅰ)型行星传动具有结构紧凑、体积小、传动范围大的优点,且适用于中小功率工作,其效率虽低于NGW型行星传动,但仍符合无碳重力灯设计要求。
考虑到NGWN(Ⅰ)型行星传动的推荐传动比为20~100,故设计为两级行星传动,结合3.4中计算出的总传动比,经计算后得出每等级传动比为94.5,其传动原理图如2所示。
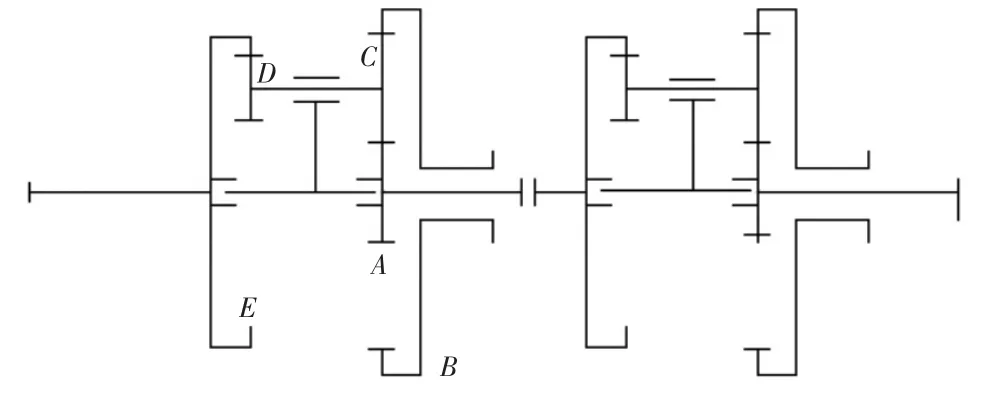
图2 无碳重力灯增速机构原理图
齿轮A为太阳轮,齿轮B为输出外齿圈,齿轮C为行星轮,一共三个;齿轮D为行星轮,一共三个,齿轮E为输入外齿圈;输入外齿圈是跟着输入轴一起转动的,输出外齿圈是固定在齿轮箱体上的,不转动的。
增速机构分为两级,每一级行星齿轮箱分为两段增速部分,分别为输入段和输出段,两段传动形式皆为NGWN(Ⅰ)型行星传动,且每段行星轮个数皆为3。
输入段的输入外齿圈E为输入端,带动三个行星轮D转动,通过行星架将动力传给输出段的三个行星轮C,输出段的输出外齿圈B固定不旋转,三个行星轮C将动力传给太阳轮A,太阳轮A作为输出。之后一级行星齿轮箱的输出端与二级行星齿轮箱输入端相连,二级行星齿轮箱输出端与电机相连。
使用该种传动方案能够实现传动比合理分配,效率较高,结构紧凑,体积小。采用三个行星轮传动,使得载荷均衡,并且实现了大传动比运转。
3.6 增速机构整机设计
经过计算以及查阅手册[13]的出各级齿轮齿数如表4所示。

表4 N G W N(Ⅰ)型行星传动(94.50)各齿轮齿数
需要校验行星轮齿装配条件:
(1)同心条件

当mA=mB=mE,各对啮合齿轮之间的中心距相等。满足同心条件。
(2)装配条件
ZA=12、ZB=66、ZE=63齿数皆为行星轮数目3的倍数,能保证各行星轮能均布地安装于两中心齿轮之间,并且与两个中心轮啮合良好,没有错位。满足装配条件。
(3)邻接条件
必须保证相邻两行星轮互不相碰,并留有大于0.5倍模数的间隙,即行星轮齿顶圆半径之和小于其中心距L:

根据以上条件,初定模数为0.5 mm,查阅齿轮设计相关手册,初定第一二级NGWN行星轮系具体参数如下表5。

表5 一二级行星齿轮具体参数表
4 无碳重力灯设计结果
4.1 无碳重力灯三维模型的建立
根据以上结论使用solidworks建立三维模型,整体三维模型如图3所示,核心机构图如图4所示,主要部件增速器的三维模型如图5所示。

图3 整体三维模型
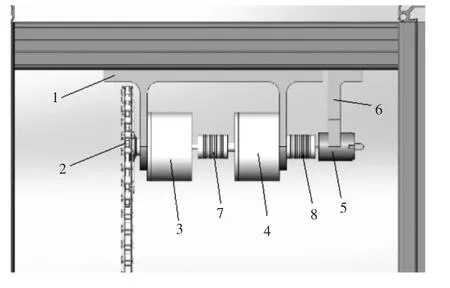
图4 核心机构模型

图5 增速器三维模型
4.2 无碳重力灯实物样机
对结构方案优化后加工制作出的无碳重力灯实物样机图如图6所示。

图6 无碳重力灯实物样机图
5 结语
无碳重力灯,采用重力势能转化为电能,在能源的利用方面采取了新的方式,采用串联两个NGWN型行星轮系的方式,在保证效率的情况下取得了大传动比的增速,从而使重力灯亮的时间大大加长,且能量损失少,亮度提高,增强了其实用性。无碳重力灯的研发,可以帮助贫困地区的人们在电源缺失的情况下获得照明,也可以作为应急灯或者野外使用。后续需要一些优化及降低成本的计算,做到更亲民更普及。