擂台机器人设计及仿真分析
2019-06-22赵河明彭志凌
章 森,王 锋,赵河明,彭志凌
(中北大学机电工程学院,山西 太原030051)
0 引言
随着近年来智能概念的不断普及和智能化技术的不断发展,越来越多的国家和地区将机器人大赛作为一个普及机器人知识、选拔机器人技术人才和转化机器人技术的重要平台,擂台机器人大赛作为机器人大赛的一个项目应运而生。擂台机器人大赛参照了中国古代擂台赛的比赛方法,比赛双方通过在擂台上进行搏斗,掉下擂台的一方即输掉比赛[1]。
擂台机器人整体机构的合理性和稳定性是机器人赢得比赛的重要前提,研究擂台机器人的设计具有重要的意义。内蒙古工业大学刘洋等人提出了一种新型涵道武术擂台机器人,该机器人在中心增加了一台12扇叶的涵道风扇,增大了机器人与台面之间的摩擦力[2];南京大学金陵学院张恒等提出了一种新的擂台机器人的设计方案,并从控制策略、运动规划、控制系统、感知系统、运动系统和机械结构等方面对该机器人进行了介绍[3];北京信息科技大学宋博飞等人对擂台机器人机器人进行了创新设计,整体采用激光切割的一体化成型的不锈钢镂空钢板搭配大扭矩电机和红外测距传感器,增加了机器人的稳定性[4];文献[5-8]提出了新的擂台机器人设计方案,并对其进行了研究。
本文提出并设计了一款轮式擂台机器人,对机器人的控制装置、行走装置、驱动装置、信号采集装置和动力装置进行了设计,并对该机器人的关键零件进行了力学分析和强度校核,最终从理论上验证了该机器人的可靠性。
1 机器人总体设计
擂台机器人通常由机架、行走装置、动力装置、信号采集装置、驱动装置、控制装置、攻击装置组成,如图1所示。机架的主要作用是承载机器人的其他装置,起到支撑作用;行走装置主要由电机和轮胎组成,是机器人运动的关键部分,对整个机器人的结构起到关键作用;动力装置的主要作用是给机器人提供动力,主要包括锂电池和降压模块;动力装置的作用是多外界的数据进行采集,主要包括红外测距传感器、光电开关和灰度传感器等;驱动装置给电机提供驱动信号,将控制装置发出的指令转化为电信号从而驱动电机运动;控制装置是整个机器人的核心,负责对传感器采集来的数据进行处理,同时对机器人发出相应的指令来控制其运动;攻击装置是擂台机器人的利器,它的主要作用是对对方机器人发起攻击,使得对方机器人丧失行动能力或者掉下擂台。
结合结构图1,擂台机器人根据红外测距传感自由行走,利用攻击铲自由转动向对方进行攻击,令对方失去行动能力或将对方推下擂台,进而结束比赛。


图1 机器人结构
2 机器人硬件设计
2.1 控制装置
控制装置是机器人的核心,被誉为机器人的“大脑”。在数控设备中,主控制板具有数据收集、信息处理运算、指令输出等功能,在擂台机器人设计中,同样需要控制装置来充当机器人的“大脑”。
擂台机器人在擂台上的可能遇到的情况多种多样,需要接收来自多个传感器的数据,并对传感器的数据处理后发出指令,数据处理量量较大,数据处理速度要求较高,所以对擂台机器人的主芯片要求较高,因此擂台机器人控制装置选用的主芯片为STM3F103VE高速处理芯片,该芯片嵌入了512KB闪存,主频达到72 MHz,处理速度达1.25百万条指令/Mhz。
2.2 行走装置
2.2.1电机选型
在进行电机功率选择的时候,为了简化计算,只考虑机器人在擂台上做直线运动的情况,并且轮胎变形、地面打滑、空气阻力等因素忽略[9-10],由文献[9]可知电机的功率大致为:
式中P是电机功率,v是机器人移动速度,r是轮胎半径,η是电机效率
根据确定出的功率公式,经过计算采用扭矩为53.7 kg·cm纳英特电机N-F-0321。纳英特电机是专为机器人设计的一款直流减速电机,整机由金属材质制成,内装有散热模块,拥有出色性能。性能参数如表1所示。
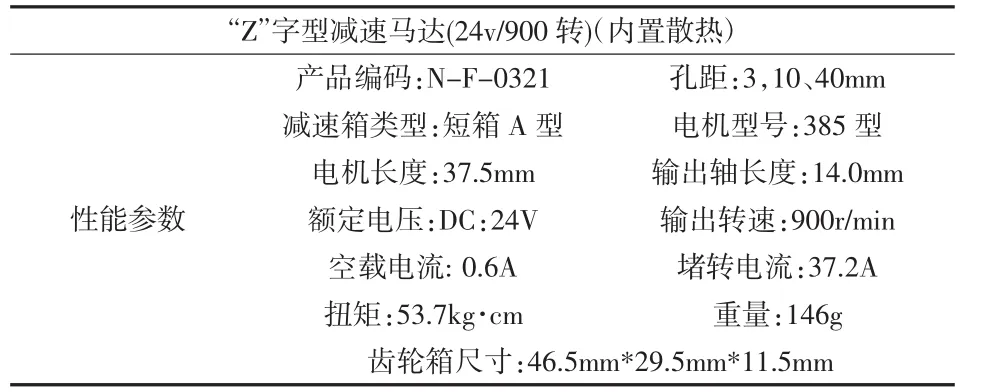
表1 N-F-0321性能参数
2.2.2轮胎选型
市场上常见的机器人轮胎有驼峰轮胎、光头轮胎、麦克纳姆轮和耐磨橡胶轮等。擂台机器人在擂台上要有较强的抓地能力,并且需要及时躲避对方机器人的攻击而转弯,所以擂台机器人的轮胎要有一定的抓地能力,并且要有灵活的转弯能力,因此此次设计选用67 mm驼峰轮胎作为机器人的轮胎较为合理。驼峰轮胎轮胎外圈采用硅胶制作,整体耐磨度较高,抓地能力较强,并且具有方便更换的优点。
2.3 驱动装置
擂台机器人在擂台上会出现经常性的急停急转以及转弯等,因此对机器人的电机驱动板提出了较高的要求,其驱动板要求有较大的驱动电流和较强的过载保护能以保证机器人的正常运行,根据电机的功率及电池的输出电压等参数,此次设计选择的是AQMH2407ND直流电机驱动模块。该驱动模块专用于战车、玩具、机器人等电机驱动,具有较强的驱动性能和极佳的过载保护。
除此之外,AQMH2407ND电机驱模还具有良好的电气性能,具有很宽的PWM波输出,对于机器人所需的转速调节具有重要的作用。
2.4 信号采集装置
擂台机器人的信号采集装置选择的是Sharp系列高精度红外测距传感器、灰度传感器和光电开关。该传感器的组合能够使得机器人能够探测到擂台的边沿,并判断其在擂台中的位置,还能够实时检测对方的机器人。
由于Sharp系列的红外测距传感器的性能优越,因此采用型号为Sharp GP2D12红外测距传感器来检测对方机器人。纳英特NC0901灰度传感器测量数据较为稳定,较多的运用在各类的机器人,本文采用其对擂台表面灰度进行识别。
2.5 动力装置
擂台机器人采用电机驱动,因此设计采用电池为机器人供电。考略到机器人的整体空间较小,不宜采用大容量单体航模电池给机器人供电,所以拟采用18650电池串并联给机器人供电。采用2节18650电池串联成1组,再将5组18650电池并联为机器人供电。18650电池具有较多的优势,在使用上可以完全满足擂台机器人机器人的要求。
3 机器人结构设计及仿真分析
擂台机器人由于对抗性较强,需要有较高的抗冲击性能,因此本体采用奥氏体304作为机器人外壳的材料。在红外测距传感器布放上,采用前、后、左前、右前、左后、右后方分别布放一个的策略,增大机器人的检测范围,减少其盲区。其布放如图2所示。

图2 红外测距传感器布放位置
机器人的攻击铲采用斜坡镂空设计,不仅减轻了机器人的自重,同时也增加了机器人整体的美观感和力量感,如图3所示。
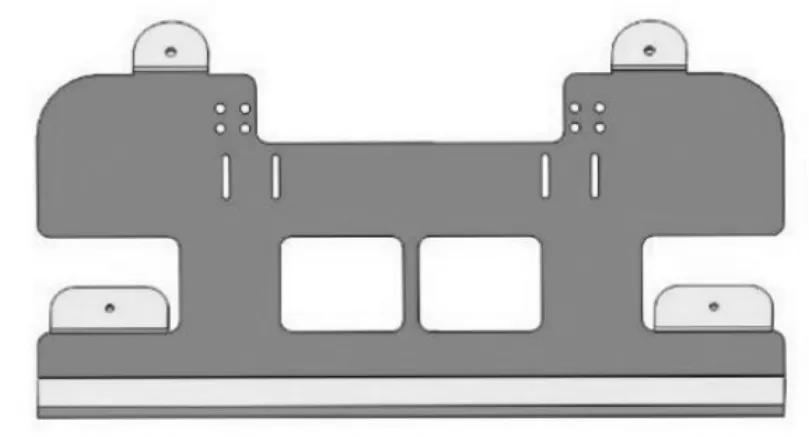
图3 机器人攻击铲
攻击铲与机器人的本体的连接采用的是由焊接成型的L型杆,该零件使得机器人的攻击铲能够在上台之后顺利下落,保证机器人完成预定的功能,其结构如图4所示。连杆在擂台机器人中的主要作用是将攻击铲与机器人上的轴承相连接,实现攻击铲的自由转动,在机器人对抗过程中,对方机器人的强大冲击力通过攻击铲传给了连杆,所以连杆的攻击过程也会收到较大的冲击力,所以对机器人的连杆进行校核是十分必要的。由于擂台机器人具有较强的对抗性,为了防止机器人在比赛过程中由于应力太大而造成零件失效,所以在擂台机器人设计中需要对机器人关键零部件进行应力校核。此次设计采用Solidworks进行三维建模,而SolidWorks Simulation是一个与SolidWorks完全集成的设计分析系统,为进行无缝衔接,避免出现格式转化的不兼容,所以此次仿真采用SolidWorks Simulation进行。
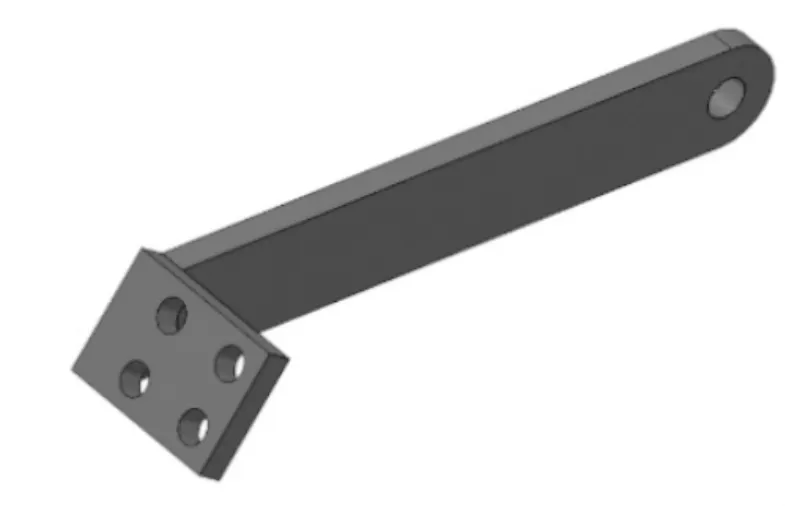
图4 机器人连杆
目前大多数的擂台机器人所采用的电机的转速n在900 r/min左右,而机器人所采用的轮胎的直径D为67 mm,所以通过公式v=n*l(l=π*D为机器人轮胎的周长)可以计算得机器人的最大速度为v=3.1557 m/s,机器人的整体重量按照4.0 kg计算,接触时间t取0.5 s,由动量定理F=m*v/t可得擂台机器人攻击铲受到的最大冲击力为F=25 kg。
连杆的应力、应变云图如图5所示。从图中可知,机器人连杆各部分的应变较小,在比赛过程中不会出现应变破坏,可以满足机器人对连杆强度的要求。
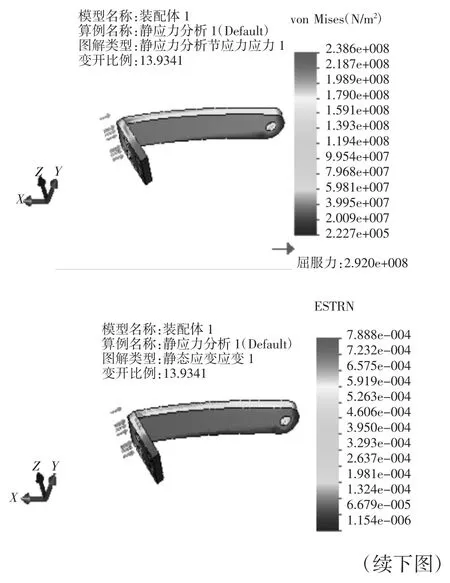
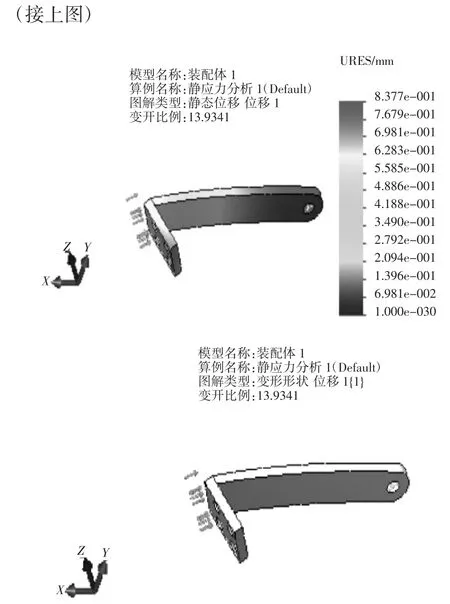
图5 连杆应力、应变云图
4 结论
本文提出了一种新型的轮式擂台机器人,并对该机器人的控制装置、行走装置、驱动装置、信号采集装置和动力装置进行了设计,并对该机器人的结构进行了设计和仿真分析,分析结果表明,该机器人能够满足擂台比赛激烈对抗的要求,对未来新型的擂台机器人设计提供一些参考价值。