基于螺旋理论的蜗杆砂轮磨齿机空间误差建模及解耦补偿
2019-06-22陶小会
徐 凯 ,陶小会 ,李 彪 ,何 坤
(1.重庆大学机械传动国家重点实验室,重庆400044;2.重庆工商大学制造装备机构设计与控制重庆市重点实验室,重庆400067)
0 前言
误差补偿法是提高机床精度的主要方法之一,通过人为地制造一种新误差去降低当前的误差,因其低成本、高通用性被广泛应用于机床制造业[1]。误差补偿以误差模型为基础,目前对机床误差模型的研究主要分为误差元素建模和机床空间误差建模。误差元素建模一般通过检测、回归得到机床各项误差元素值的表达式;空间误差建模基于运动学建模得到空间误差与所有误差元素之间的数学关系以表示机床的综合误差。五轴机床旋转轴的旋转运动会极大复杂了误差补偿的难度,需要在误差元素模型的基础上进行空间误差建模[2],并在此基础上进行补偿。基于多体系统理论的机床空间误差建模方法通用性较强,被国内外学者广泛采用。陈剑雄、付国强等[3-4]利用多体系统理论与齐次坐标变换建立机床的空间误差模型,并基于误差微分运动对空间误差模型进行解耦补偿。杨吉祥等[5-6]以旋量理论为数学工具建立基于全局坐标系的五轴机床通用运动学模型,简化了建模难度;项四通等[7-9]应用螺旋理论对五轴机床正运动学及逆运动学进行建模,有效地空间误差进行预测和补偿。
综合来看,五轴加工中心作为典型的五轴机床,针对其空间误差建模及补偿的研究已较为成熟,而蜗杆砂轮磨齿机与常见双转台、双摆头五轴加工中心结构存在差异,存在 X、Y、Z、A、B、C 共 6个运动轴。而目前针对蜗杆砂轮磨齿机空间误差建模主要基于多体系统理论与齐次坐标变换,涉及多个局部坐标系转换,过程较为复杂。本文基于螺旋理论,对数控蜗杆砂轮磨齿机进行空间误差建模,并在子问题的基础上进行运动学逆解,通过具体案例,验证了方法的正确和有效性。
1 基于螺旋理论的蜗杆砂轮磨齿机运动学模型
1.1 移动副与转动副的旋量表示
旋量理论是研究空间机构学非常重要的数学工具。刚体在三维空间的运动均可以表示为绕一轴线的旋转和沿该轴的平移[10],如图1,速度旋量是含有速度幅值的旋量,是用以描述刚体关于旋量轴线的运动,如式1。

图1 旋量轴线及螺旋运动速度场

式(1)中,w为轴线角速度、v为线速度,r为刚体上一点指向轴线的位置向量r=rp-ro,rp、ro分别表示固连在刚体上点P及轴线上点O的位置向量,h为旋量的旋矩,s为轴线向量。则刚体上任意点的速度可以分解为平行于轴线的分量hw及正交于轴线的分量 w ×(rp-ro)。
该运动变换群的李代数形式可用如下形式的矩阵表示:
刚体的转动和移动可以由旋矩为零及旋矩无穷大的速度旋量来描述,如式(2):

对于移动轴,即wˆ=0时,

对于旋转轴,即wˆ≠0 时,

螺旋理论在机器人领域应用广泛,六轴蜗杆砂轮磨齿机与常见工业机器人结构上存在相似点,由转动副和移动副组合而成,故本文基于螺旋理论对蜗杆砂轮磨齿机运动学及空间误差建模。
1.2 六轴蜗杆砂轮磨齿机空间误差建模
蜗杆砂轮磨齿机床机构如图2所示。机床的主要运动包括三个直线轴(X、Y、Z轴)的直线运动和三个旋转轴(A、B、C轴)的旋转运动。其中三个直线轴可确定砂轮的空间位置,A轴用于调整蜗杆砂轮的安装角,加工过程中A轴保持不动;B轴为蜗杆砂轮刀具的旋转主轴,C轴为工件旋转轴,三旋转轴可确定砂轮于工件的空间相对姿态。

图2 六轴蜗杆砂轮磨齿机结构
对于旋转轴:
C 轴:wC=[0 0 1]T,vC=rC× wC,ξC= [wCvC]T;
A 轴:wA=[1 0 0]T,vA=rA× wA,ξA= [wAvA]T;
B 轴:wB=[0 1 0]T,vB=rB× wB,ξB= [wBvB]T;
对于移动轴:
X 轴:vX=[1 0 0]T,ξX=[0 vX]T;
Z 轴:vZ=[1 0 0]T,ξZ=[0 vZ]T;
Y 轴:vY=[1 0 0]T,ξY=[0 vY]T。
由Rodrigues方程,各轴的旋量运动对应的矩阵为:

蜗杆砂轮磨齿机运动连可以分为刀具链(O-XZ-A-Y-B)与工件链(O-C)两部分,整合两运动链得到刀具-工件的运动连(C-X-Z-A-Y-B),用以描述刀具相对工件的相对位姿。此时,刀具-工件链的运动学正解公式为

P0表示工件相对刀具的初始位姿,在描述刀具和工件的位姿变换关系时,对式(6)简化,不考虑刀具-工件的初始位姿,有:

根据刚体运动学理论,如表1,六轴蜗杆砂轮磨齿机共计41项几何误差元素,包含30项位置相关误差及11项位置无关误差(B轴为高精度电主轴,其误差可忽略)。

表1 六轴蜗杆砂轮磨齿机的41项几何误差
以Y轴为例,Y轴的运动存在6项位置有关误差及2项位置无关误差,每一个误差项均可以看作一个由旋量表示运动,相当于在理论无误差运动的基础在6个自由度方向上进行了8项运动:

相同轴线上的指数积表达合并,进一步简化为6个运动方向的指数积分模型如式(9)。

同理可以得到X、Z、A、C轴的各轴误差的旋量表示,如式10-13。

综上,在考虑机床误差元素的情况下,建立从C轴到B轴的变换作为描述机床的空间误差模型,如式(14):

2 六轴蜗杆砂轮磨齿机空间误差模型解耦补偿
2.1 Paden-Kahan子问题
在机床的空间误差模型中,机床各轴的运动量与误差元素间存在耦合,给机床运动学的逆解造成一定的困难。在串联机器人的运动学反向求解问题中,经常利用刚体运动的某些特性消去耦合的运动关节量以简化求解过程。通常可以将整个运动学反解问题分解成多个解为已知的子问题,即Paden-Kahan子问题。本文空间误差模型的反向求解需要基于两类典型的子问题。
(1)子问题 1:SubProb-R(ξ,p,q)—绕某个轴的旋转
已知:单位运动旋量 ξ= [w r× w]T,p,q是空间两点,求满足条件 eθξˆp=q 的 θ。

图 3 子问题 1:SubProb-R(ξ,p,q)

图 4 子问题 2:SubProb-R(ξ1,ξ2,p,q)
(2)子问题 2:SubProb-RR(ξ1,ξ2,p,q)的特例—绕两个相交轴的旋转。
2.2 基于典型子问题的六轴蜗杆砂轮磨齿机空间误差模型逆解
对于本文所示蜗杆砂轮磨齿机,刀具与工件的相对姿态由旋转轴的运动决定。从机床运动学指数模型中提取旋转运动,设R表示刀具-工件的相对姿态。

(1)C轴求解

图5 C轴运动量的求解
设qC为C轴线上一点,有同时定义为在垂直于转轴 ξC的平面上的投影直接求解得到C轴运动量θC如式(16)。

(2)B轴求解

图6 B轴运动量θB的求解
如图 6,qA、qB为 A、B 轴上一点有表示为在垂直于 wB的平面的投影。令如图 6,对 δ投影,得到 δ′,并且设为 θ0矢量与的之间的夹角,则,最终解得 θB,如式(17)。

(3)A轴求解

(4)平动轴X、Y、Z轴求解
根据求得的旋转轴的运动量代回到空间误差模型中,可直接解线性方程求得平动轴运动量。
3 蜗杆砂轮磨齿机空间误差补偿案例
基于文献[11]误差元素模型及辨识结果,验证本文补偿方法。以空间误差综合模型与理论无误差模型的数值之差作为误差评判标准,分别得到姿态误差与位置误差,采用本文补偿方法,求解补偿值带入模型,得到新的姿态误差与位置误差,结果如图8所示。显然,采用补偿方法后,位置误差明显减小,而姿态误差在补偿后减小不明显,究其原因,一方面由于误差初值较小,能够进一步减小的空间较小,另一方面,采用本文方法针对姿态矩阵的求解是近似解析法,存在原理误差,若要进一步提高精度,需要进行迭代进行多次求解。

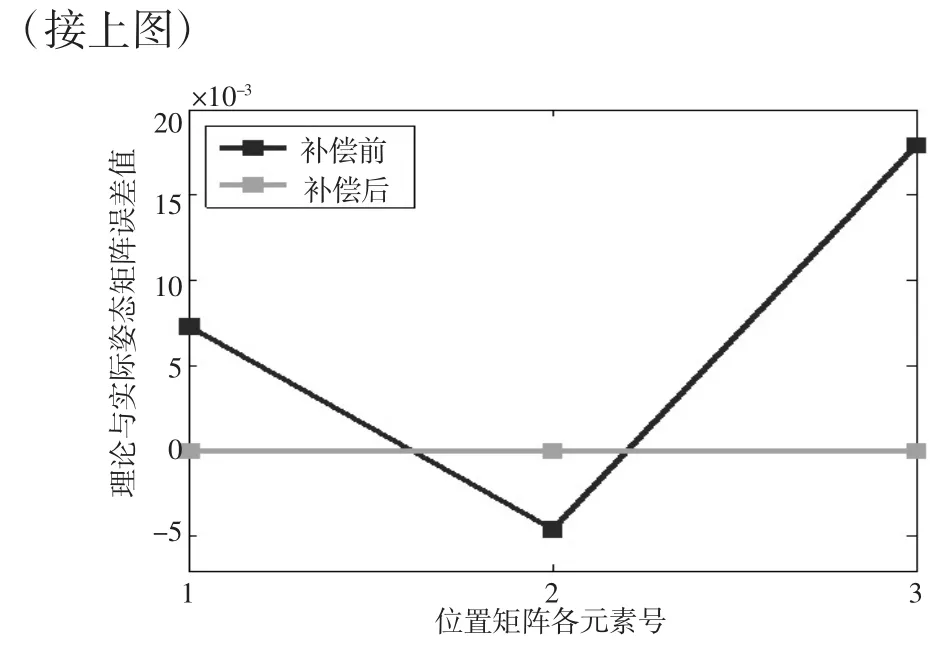
图8 补偿前后姿态误差与位置误差
4 结束语
多轴机床的空间误差补偿因其各轴运动与误差间存在耦合关系,造成补偿困难,对各轴进行单一的误差补偿效果往往不好。本文以六轴数控蜗杆砂轮磨齿机为例,基于螺旋理论建立建立了蜗杆砂轮磨齿机空间误差并进行解耦补偿。
(1)基于螺旋理论,对蜗杆砂轮磨齿机各移动副与转动副的运动进行描述。
(2)建立了基于螺旋理论的空间误差综合模型,与传统基于齐次坐标变换方法相比,不需要建立各部件的局部坐标系,简化了建模难度及工作量。
(3)根据Paden-Kahan子问题对各轴补偿量进行分步求解计算,实现了六轴蜗杆砂轮磨齿机空间误差的有效补偿。