基于STM32单片机的智能搬运机器人的设计
2019-06-20黄钰深张晓培梁金耀赵明范碧纯
黄钰深 张晓培 梁金耀 赵明 范碧纯

0 引言
智能机器人带有多种传感器,可以将传感器得到的信息进行融合,有效地适应变化的环境[1]。本文设计的搬运机器人只要在PC端上位机上设置搬运停放的位置,搬运机器人进行自主运动,根据指定的路线行进到指定位置。
1 智能搬运机器人系统设计方案
系统设计中选用STM32单片机作为主控制器,负责接收指令和逻辑运算。WI-FI模块作为搬运机器人与PC端上位机之间通讯的桥梁,负责传输数据以及各种指令。使得PC端上位机可以实时控制搬运机器人。电机及电机驱动模块及电机是系统的动力部分。超声波模块负责检测搬运机器人在前进线路上是否有障碍[2],并作出调整直到搬运机器人道达指定位置。系统的总体框图如图1所示。
2 智能搬运机器人硬件设计
2.1 控制模块的选择
STM32是一种常用的开发芯片,其运算速度快、精度高、能耗小等,并且易于开发。本系统采STM32F103RCT6作为控制系统的主控制器,完成超声波信息收集、避障、行进、搬运等任务。
2.2 超声波传感器模块
本设计的避障采用的是超声波测距离传感器。超声波测距是通过发射超声波,在遇到障碍物后超声波会被反射被接收器接收到[3]。其与单片机的接线图如图2所示。
2.3 电机驱动模块
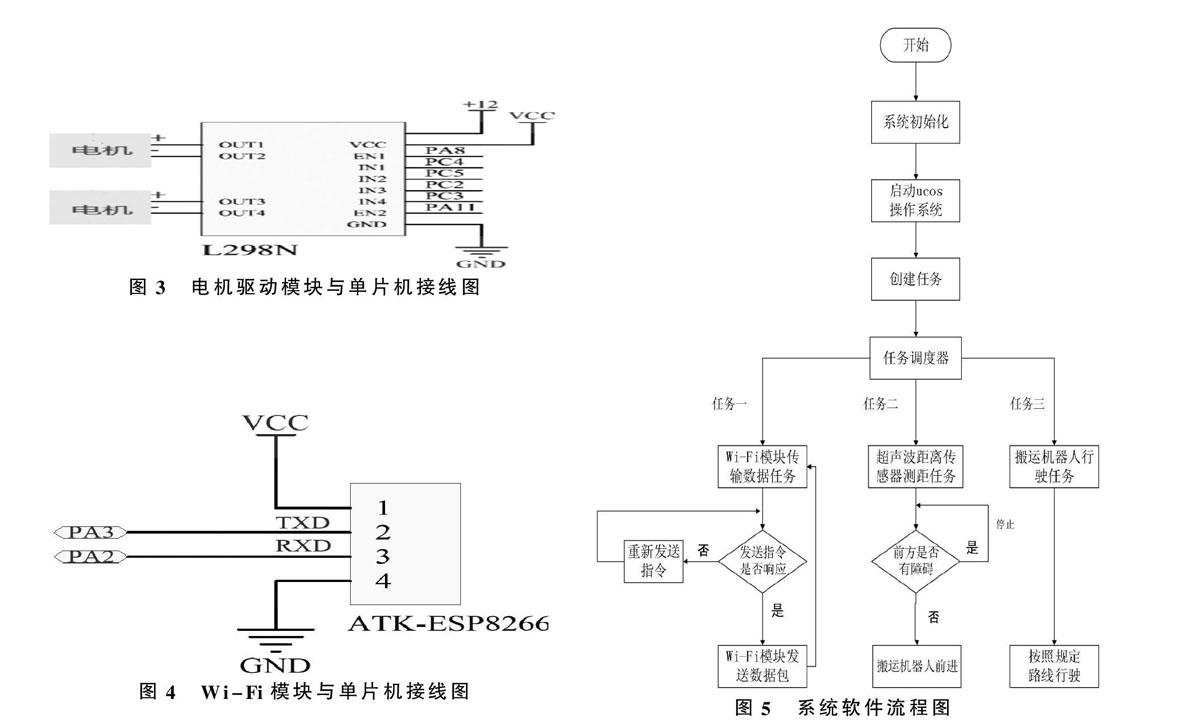
此系统的电机驱动模块采用L298N芯片。在单片机接上模块相应的控制引脚,通过单片机即可控制电机的正、反转以及速度。四个电机的不同状态的配合完成小车的前进、后退、左、右转等功能。其与单片机的连接如图3所示。
2.4 WIFI通信模块
本设计上位机和下位机进行数据传输采用的无线传输WiFi模块ESP8266。其电路连接如图4所示。
3 系统软件设计部分
3.1 UCOS操作系统
为了使得系统实时性良好,本设计在单片机上运行了UCOS系统。实时操作系统可以运行多任务,操作系统可以及时对任务进行处理[4]。
3.2 上位机界面设计
该设计可以实现在上位机设置搬运机器人停放的位置。本设计采用Qt Creator软件编写PC端上位机,实现人机交互界面。
3.3 PID算法
为了有效地控制机器人的行进,本设计采用PID算法控制电机的运行[5],减少误差,停车机器人上装超声波测距传感器,检测行进路线上是否存在障碍物,避免发生碰撞事故。
本设计只需要把货物放到搬运机器人上,机器人可以根据上位机设定的位置,自动行进到指定位置,系统流程如图5所示。
4 总结
本文根据码头智能搬运机器人的功能需求,对搬运机器人进行了硬件和软件的设计。通过模拟实验测试,该机器人可以根据PC端上位机的不同操作指令,完成搬运工作。该设计为码头智能搬运提供了一个有效的解决方案。
【参考文献】
[1]王铁军.基于传感器阵列的嗅觉机器人及搜寻算法研究[D].哈尔滨工业大学,2008.
[2]智能车行车线偏离和障碍物报警的实现[D].南京:南京航空航天大学,2011.
[3]麦锦文.超声波技术在汽车防撞系统设计的应用[D].装备制造技术,2010.
[4]實时操作系统任务调度算法的硬件实现[D].哈尔滨:哈尔滨理工大学,2011.
[5]谭加加.刘鸿宇,等.电子世界[J].PID控制算法综述,2015,12(16):78-79.
※基金项目:自治区级大学生创业训练计划项目(201811607074)。
作者简介:黄钰深(1997—),男,在读本科生,北部湾大学机械与船舶海洋工程学院。
*通讯作者:张晓培(1984—),女,讲师,北部湾大学机械与船舶海洋工程学院。
