舰船中央冷却系统多智能体自治控制
2019-06-19陈于涛曹诗杰李东亮邵钰蟒
陈于涛,曹诗杰,李东亮,邵钰蟒
(海军工程大学 动力工程学院, 湖北 武汉 430033)
舰船中央冷却系统(Central Cooling System,CCS)是指整个动力系统的各个冷却部位由集中供应的淡水统一冷却,而循环淡水通过中央冷却器由海水集中换热冷却[1-2]。CCS提高了淡水回路的使用效率,大大减少了海水管路的数量,从根本上避免了海水回路对动力系统热交换器和设备的腐蚀,同时降低了对管路材料的要求[3],是未来电力舰船冷却系统的发展方向之一。
舰船电力推进装置系统复杂,运行工况和需要冷却的设备多,且布置分散,运行环境不确定性因素大,对生命力性能的要求越来越高[4-6]。目前越来越多的舰船电力推进装置采用了CCS,但对CCS的控制目标与下一代舰船在复杂情况下的生存能力控制需求并不完全匹配,主要还是以运行的可靠性和节能效果为首要目标[7-8],对CCS任务切换后的自重构能力以及故障发生后的自愈能力的研究较少,距离舰船综合电力系统整体控制目标的需求还有差距。
基于智能体(Agent)的智能控制方法在复杂系统控制领域中的应用近年来已成为研究热点[9-11]。针对CCS的自治控制问题,相对于常规智能控制,基于智能体的自治控制是一个更有效的综合智能控制体系,可以使所建立的控制系统具有足够的智能和较强的生存能力,以适应复杂任务和不确定环境的变化[12-16]。
本文针对电力推进装置CCS的状态重构和故障恢复问题,将智能体自治控制的理论与方法引入CCS控制领域,设计多智能体自治控制体系,包括分层拓扑结构和协作运行机理。在此基础上,设计以CCS为对象的原型试验装置,并搭建以多智能体控制系统为核心的试验研究平台,对控制系统的性能进行验证与分析。
1 CCS多智能体控制结构设计
1.1 CCS结构组成
电力推进装置CCS主要由淡水回路、海水回路和控制系统所组成。开式海水回路中来自舷外的低温海水,通过中央冷却器吸收循环淡水中的热量,然后排出舷外。闭式淡水回路是整个CCS的主要部分,其中循环淡水负责冷却电力推进装置中的各个发热设备和换热器。
电力推进装置CCS淡水回路的基本构成如图1所示,包含分布于各个机舱的冷却用户和互为备份的冷却泵组,通过冗余的淡水管路连接在一起,其控制系统需要在各种突发情况下保持良好的控制性能。
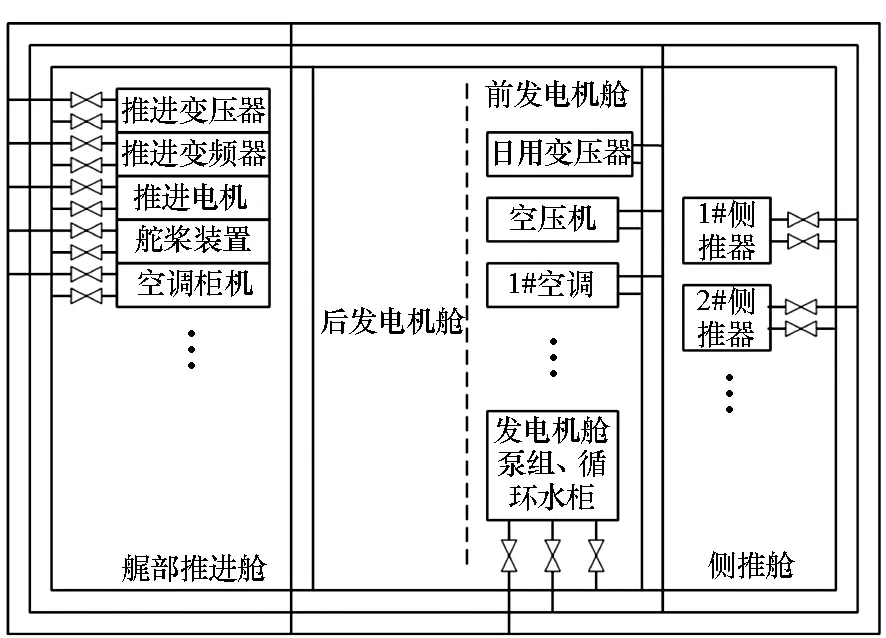
图1 中央冷却系统构成Fig.1 Arrangement of CCS configuration
1.2 多智能体控制结构
根据CCS自身的分层拓扑结构形式,采用三层多智能体系统(Multi-Agent System,MAS)来构建电力推进装置CCS自治控制结构。所设计的分层MAS拓扑结构如图2所示,其中Agent包括:上层系统级Agent,负责整个系统的任务分配与协作运行;中间层子系统级Agent,分为三类,包括资源Agent、冷却用户Agent和管路Agent,负责各个子系统的任务分配与协作运行;下层部件级泵Agent,阀门Agent负责控制指令的执行和物理设备状态的监视。
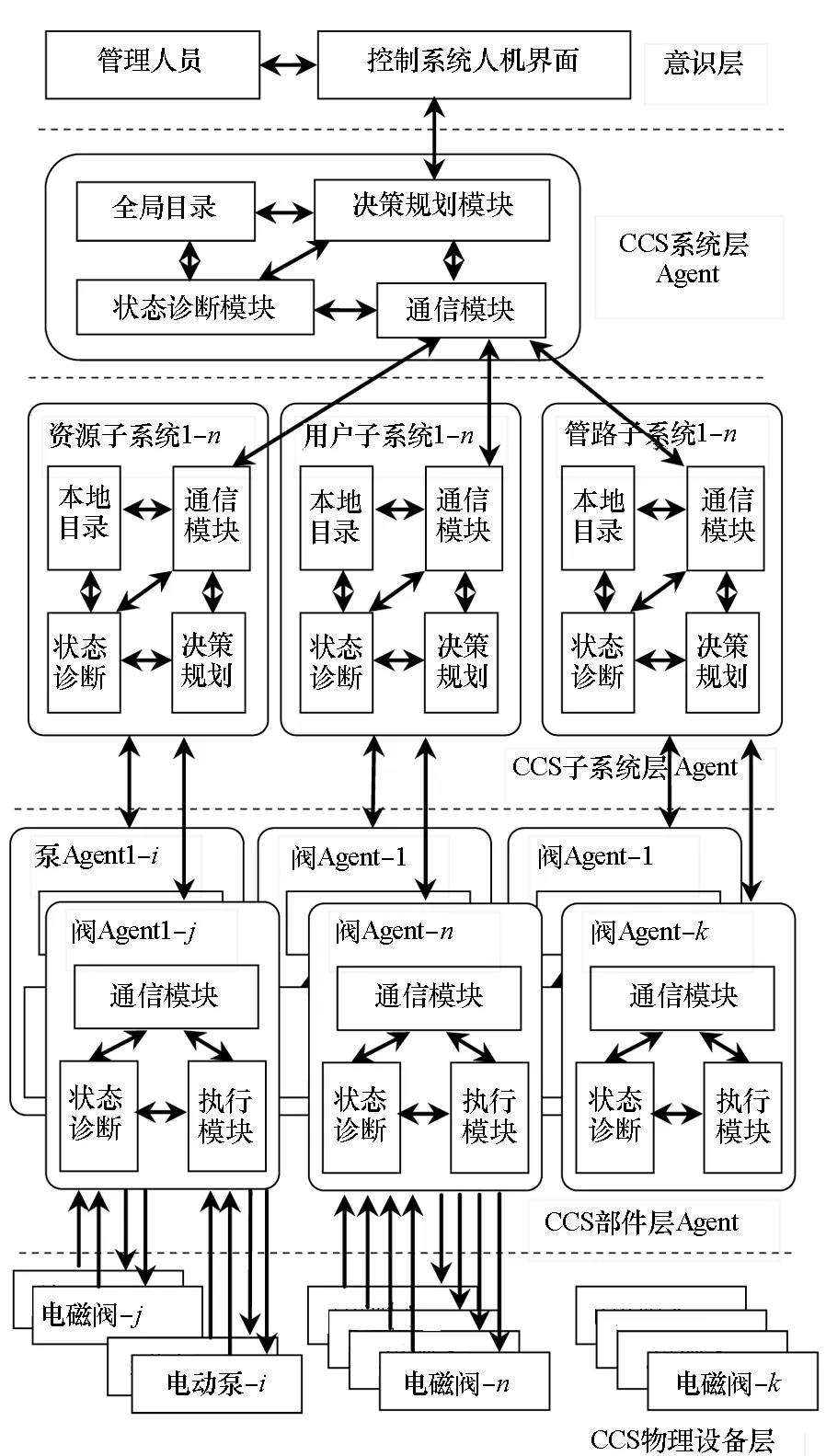
图2 分布式多智能体系统分层拓扑结构Fig.2 Layered topology structure of distributed MAS
在Agent内部结构方面,同一层的Agent采用相同的内部结构,不同层的Agent根据其功能和接口关系采用特有的内部结构。Agent内部主要包含通信模块、状态诊断模块、决策规划模块、系统能力目录模块以及执行模块等部分。
从总体上看,所设计的MAS拓扑结构的特点在于综合了层次结构与模块结构的优点,是一种混合体系结构。按照CCS系统的分层拓扑形式进行Agent划分,可以使得Agent之间的关系更清晰,各个Agent的边界和功能更加易于理解,并且能更好地区分子系统之间的交互信号和子系统内部的交互信号,同时使结构更易于扩展。上层Agent可对下层Agent进行控制,并负责其下层Agent之间的协调与管理。同时可以将该结构中每个子系统Agent看作顶层协调控制Agent下属的一个模块,而所有属于同一子系统的底层部件Agent处于同一模块内,同一层次内子系统Agent之间通过模块化的通用接口进行通信,同一子系统所属部件Agent之间可以通过通信模块直接通信。因此,这种体系结构克服了层次结构和模块结构各自的不足,简化了系统分解过程和降低了通信网络设计的复杂性,避免了各单个Agent过分强调自身任务的重要性而独占资源,从而提高协作效率和减少通信量。
2 CCS多智能体自治运行机制设计
2.1 多智能体系统协作模型
在合同网模型的基础上采用Agent联盟和熟人机制进行MAS协作模型的优化。
基于Agent联盟的MAS协作模型中,上层系统级Agent将任务信息直接发送给中间层“盟主”,并与各个“盟主”进行交互协商,得到该任务的控制策略。相应获取任务的“盟主”根据各自联盟内的各个Agent的能力进行任务分配、协商,并最终决定完成任务的方案。Agent联盟能够充分整合各个Agent的能力以及其合作性,减少大量的通信量,使得任务的完成过程更加合理而高效。
MAS的任务模式对于给定的控制对象来说是有一定规律的,系统运行一段时间后,很多Agent会形成一种相对稳定的任务接受模式,即各种任务都由各自相对固定的一些Agent来完成。对于某个特定的任务来说,其相对固定完成任务的那些Agent即为“熟人”。上层Agent接受任务后,先在其“熟人”库中寻找能够完成任务的Agent,如果找到了目标Agent,即可立即“建立合同”,完成本任务的分配,如果在“熟人”库中未找到能够完成任务的Agent,则再以广播的形式将任务信息发送到其他Agent。这样的协作过程可以进一步提高任务效率。
2.2 多智能体系统协作流程
根据所设计的改进合同网协作模型,MAS的协作流程如图3所示,包括任务分配和故障恢复两种基本情况。
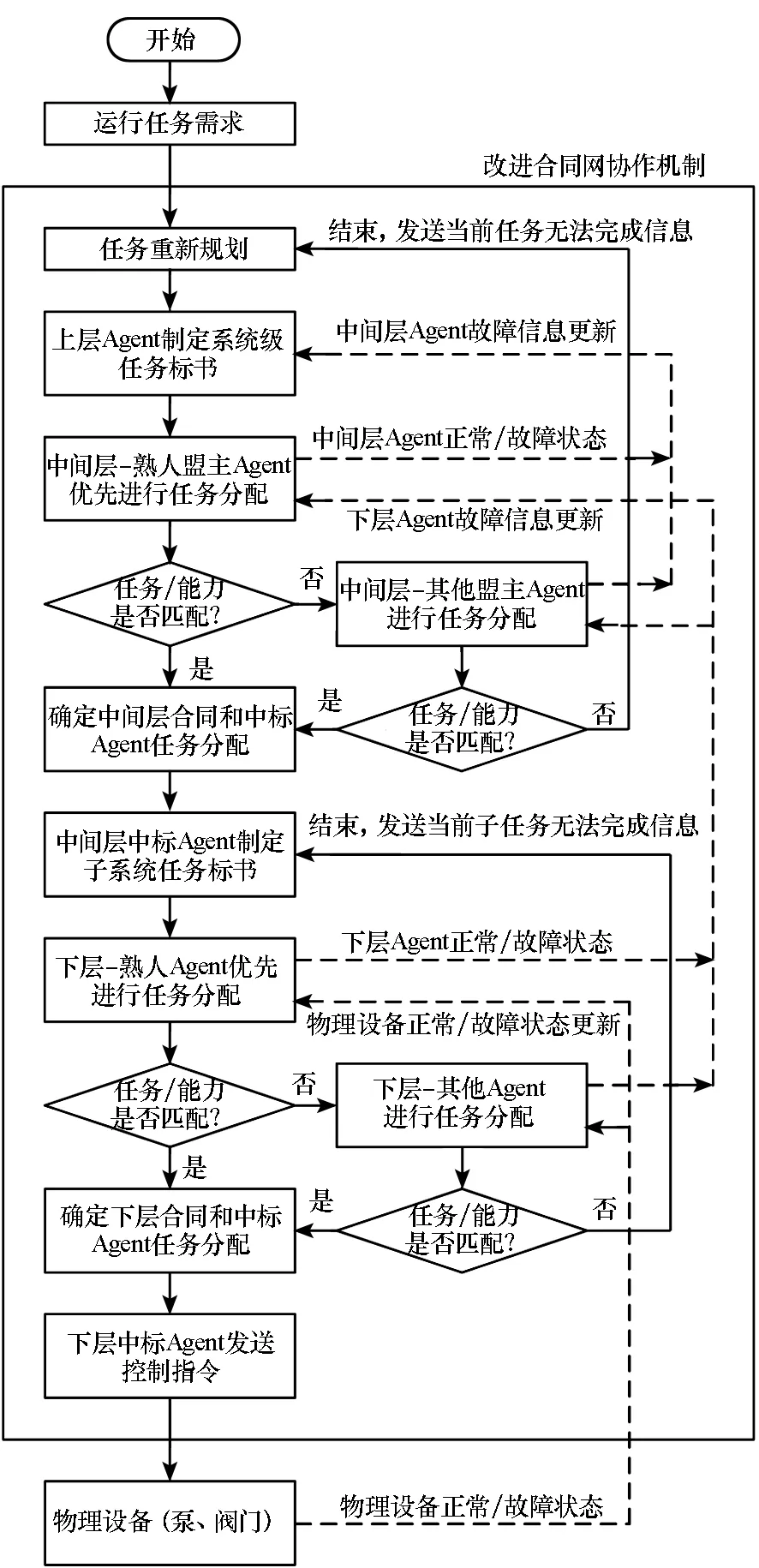
图3 多Agent系统协作流程图Fig.3 Cooperation process of multi-agent system
在自动任务分配过程中,上层系统级Agent根据运行任务需求制定任务标书,将任务分解成不同的子任务给中间层盟主Agent。首先采用熟人机制,然后再比较任务能力值的大小,最后与各个中间层盟主Agent签订任务合同。定义中间层Agent对各个子任务的熟悉度函数为:
(1)
式中:x为累计完成任务的次数,y为累计任务失败的次数。
当任务分配开始时,上层Agent首先比较各个中间层Agent对于各个子任务的熟悉度,选择熟悉度较高且不为0的至多两个中间层Agent进行任务招标,再比较被招标的中间层Agent的能力值,选择完成任务能力值较高的一个作为完成指定任务的联盟对象。中间层Agent分配子任务后,在本子系统中采用相同的方法确定完成子任务的下层部件级Agent,最终由下层Agent中的执行模块完成控制指令的执行。若在改进合同网协商过程中,根据当前Agent的任务/能力状态无法完成给定任务的分配,则将信息反馈给上一层级的Agent,重新进行任务规划。
按照这种协作方式,整个MAS可以完成运行任务的自动分解和智能分配与执行。
在故障恢复过程中的MAS协作过程与任务分配情况不同,其协作流程如图3虚线部分所示。
故障恢复过程是从下层部件级Agent故障感知开始,通过通信模块将物理设备故障状态和自身任务/能力信息发送给中间层的子系统盟主Agent,后者根据当前状态重新进行任务规划。若中间层Agent能够通过子系统内部协作完成故障恢复,则MAS只进行局部调整,对其他子系统的Agent工作不产生影响。若中间层Agent无法恢复故障,则通过通信模块将故障协作请求发送给上层系统级Agent,在整个系统范围内进行重新规划和故障恢复任务/能力匹配,完成故障恢复标书的制定与任务分配。通过这种协作方式,MAS能够完成故障状态的智能恢复和系统运行状态的自动重构。
3 试验研究平台设计
3.1 结构体系
针对CCS自治控制的研究需要,以淡水回路为对象设计原型试验装置。总体思路是保持CCS的拓扑结构和功能不变,采用小型化的元部件代替实际系统中原有的设备与部件,增加对管路泄漏进行模拟和控制的阀门。
具体的实现方式包括:①采用小功率泵组模拟实际的CCS淡水冷却泵组;②采用电磁阀和流量计模拟电力冷却用户,通过测量流量计的流量来分析对冷却用户的冷却效果;③增加模拟管路泄漏的手动阀门,以及对管路泄漏进行控制的电磁阀。整个原型试验装置包含37个电磁阀、68个管路三通、21个流量计和6个故障阀。
此外,采用以工控机和数据采集和驱动板卡为核心的控制系统硬件,以及以多Agent自治控制模型算法为核心的控制系统软件,结合原型试验装置建立综合的试验研究平台,其总体结构如图4所示。
3.2 试验设计
试验装置有4种运行工况,包括工况1航行,工况2进出港,工况3锚泊,以及工况4动力定位。表1所示是该装置在不同的运行工况中所属电力设备的工作情况和对CCS的冷却需求。
为了验证所设计的电力推进装置CCS多Agent自治控制模型和算法的有效性,设计了相应的试验内容,试验项目、试验内容和试验设置见表2。
试验项目包括4种类型,分别是运行工况切换、设备故障恢复、管路泄漏恢复以及多种情况并发的复杂运行情况,包含了CCS在运行过程中可能遇到的各种情况,可以对多Agent自治控制系统的有效性进行全面验证。
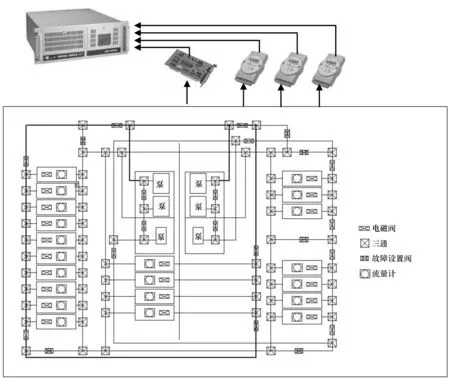
图4 多Agent控制系统试验研究平台原理图Fig.4 Arrangement principle of experimental research platform for multi-agent control system
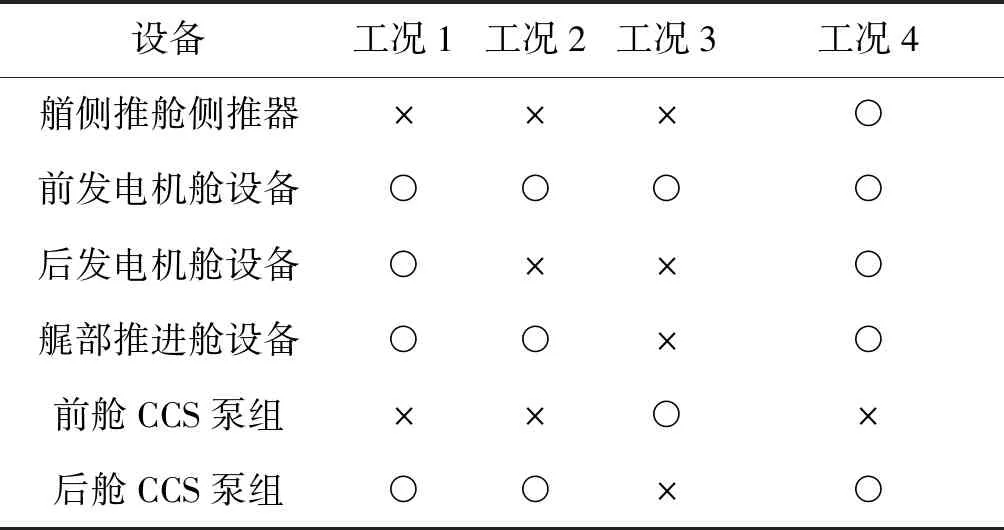
表1 电力推进装置设备运行状态和冷却需求
注:×表示不工作,不需要冷却;○表示工作,需要冷却。
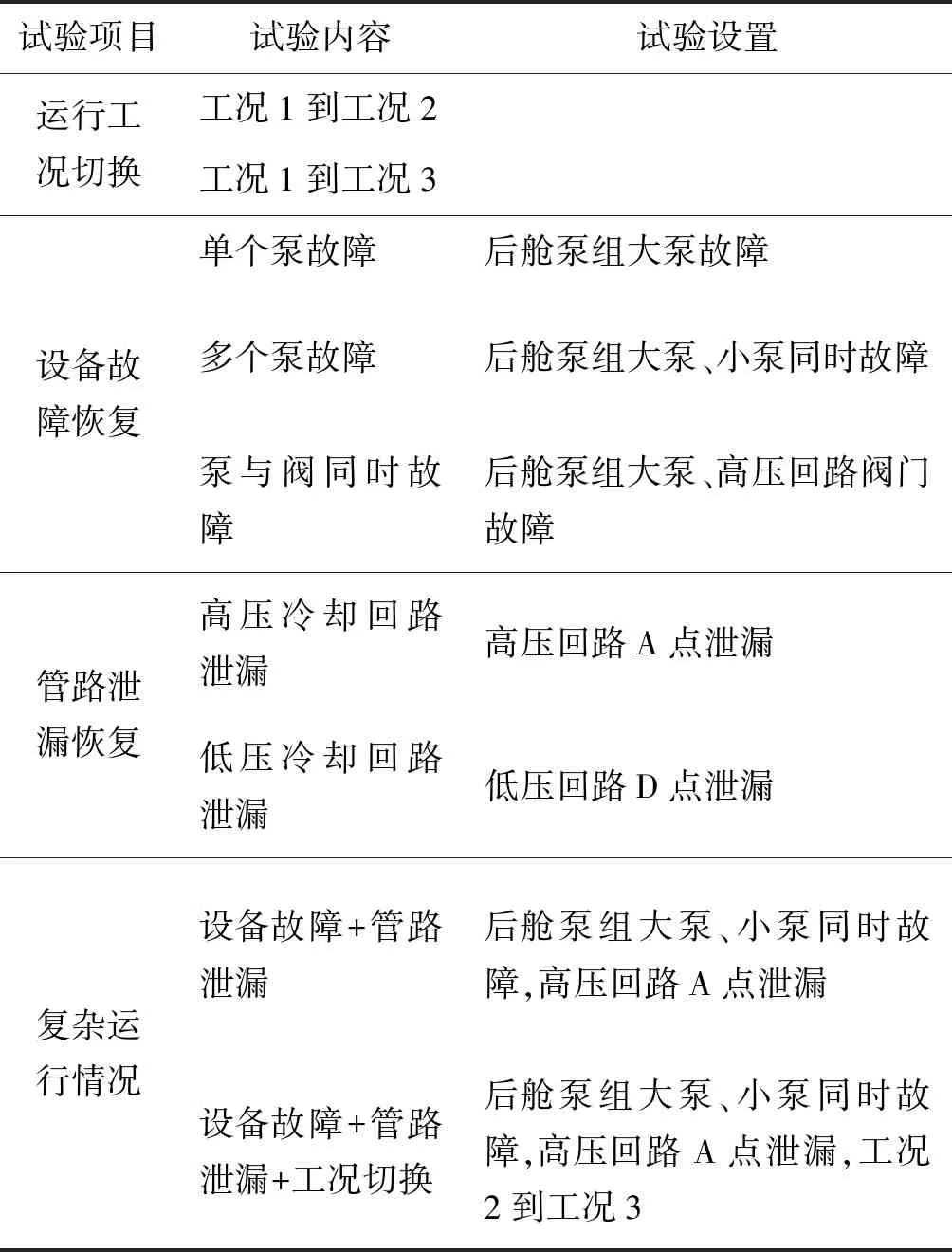
表2 试验项目和内容列表
运行工况切换和故障恢复试验,主要检验自治控制系统的快速任务分配和状态重构能力。管路泄漏恢复和复杂运行情况试验,主要检验自治控制系统的分布式智能和自愈能力。
4 试验分析
以复杂运行情况为例,对多Agent自治控制系统的控制过程和效果进行分析。试验设置为进出港工况,后舱泵组大泵、小泵同时故障,同时高压回路A点泄漏。
4.1 控制过程分析
在故障状态重构的过程中,需要将后舱泵组切换到前舱泵组运行,并对高压回路中的管路泄漏情况进行故障恢复。故障涉及高压冷却回路子系统和后舱泵组子系统,其中前者的故障可以由子系统Agent内部解决,而后者的故障处理则需要系统级Agent来协调解决。
控制过程中的多Agent系统协作过程如下:管路泄漏故障发生后,高压冷却回路中下层22、32号电磁阀Agent组合的能力值从3降为0,同时下层Agent将故障信息发送到中间层Agent,后者根据反馈的3个Agent组合所提供的能力值大小,确定23、25号电磁阀Agent组合(能力值为2)与24、33号电磁阀Agent组合(能力值为1)的4个电磁阀打开,确定22、32号电磁阀Agent组合(能力值为0)的2个电磁阀关闭。下层的6个电磁阀Agent接收到指令后,按照要求执行电磁阀的开关动作,完成对管路泄漏的故障恢复。
后舱泵组大泵和小泵发生故障后,下层Agent将故障信息发送到中间层资源1Agent,后者所属子系统的内部协作无法完成故障恢复,将故障信息继续发送到上层系统级Agent。上层Agent接收到故障信息后重新进行任务分配,确定由中间层资源2Agent提供冷却水的供应,资源2Agent完成任务分解后,由相应的下层Agent执行控制动作,打开前舱泵组的大泵与小泵。
4.2 控制效果分析
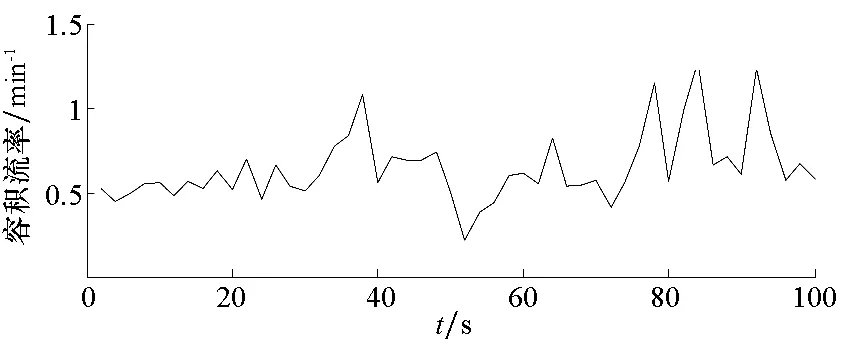
(a) 8号用户(a) No.8 user
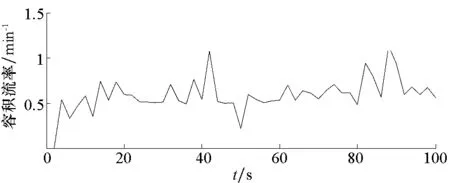
(b) 18号用户(b) No.18 user图5 故障恢复过程中冷却水流量变化曲线Fig.5 Volume flow rate curve of chilling water during fault recovery process
在进出港工况中,需要冷却的用户是艉部推进舱的10个电力设备和前发电机舱的4个电力设备,以艉部推进舱的8号冷却用户与前发电机舱的18号冷却用户为监视对象,其故障前后的容积流率值变化如图5所示。由图可以看到在第50 s发生故障后,8号和18号用户的冷却水供应突然减少,控制系统迅速做出反应,及时发出故障恢复的指令,使CCS的运行状态自动重构,用户的冷却流量得到恢复。整个故障恢复过程能够在没有人员干预的情况下自动完成,表明控制系统具有足够的实时性、智能性和鲁棒性。
5 结论
本文针对舰船电力推进装置中央冷却系统的状态重构和故障恢复问题,设计了与之对应的多智能体自治控制体系,包括分层控制结构和改进合同网协作模型,优化了自治运行机制。在此基础上,建立了基于原型试验装置和多智能体控制系统的综合试验研究平台,并对控制系统的性能开展试验研究和验证。试验结果表明:所设计的多智能体自治控制体系,具有自主协商、自动任务分解、状态快速重构以及故障自动处理的特点。能够自主完成系统动态重构和故障恢复控制,使电力推进装置中央冷却系统具备自重构和自愈的能力。
