直升机座舱操纵机构人机工效设计及验证
2019-06-19黄育龙巫艳明
黄育龙,刘 晨,巫艳明
(1.中国直升机设计研究所,江西 景德镇 333001;2.海军驻景德镇地区军事代表室,江西 景德镇 333001)
0 引言
典型的直升机座舱操纵机构包括周期变距杆、总距杆和脚蹬,其中周期变距杆用来控制直升机的俯仰和滚转,总距杆控制直升机的升降,脚蹬控制直升机的航向,各机构有机配合是驾驶直升机的关键。各操纵点的空间位置和运动行程均能影响操作效率和驾驶体验。因此,直升机操纵机构人机工效问题应给予足够重视。
目前,对座舱操纵机构人机功效的研究都集中在固定翼飞机领域,直升机方面缺乏相关研究。直升机座舱操纵机构设计主要参考文献[3]中给出的一些具体的参考数值,缺乏系统的方法和理论,不具有通用性。
基于此,我们建立了基于人体髋(H)点的座椅及直升机操纵机构的布局方法,用于指导直升机座舱操纵机构的设计和改进。
1 部件人机工效设计原理
1.1 座椅人机工效设计原理
驾驶员座椅属于工作座椅范畴,因此,设计上应遵循工作座椅的基本原则,座椅的样式和尺寸应符合人机功效的要求,工作座椅设计要求如表1所示。
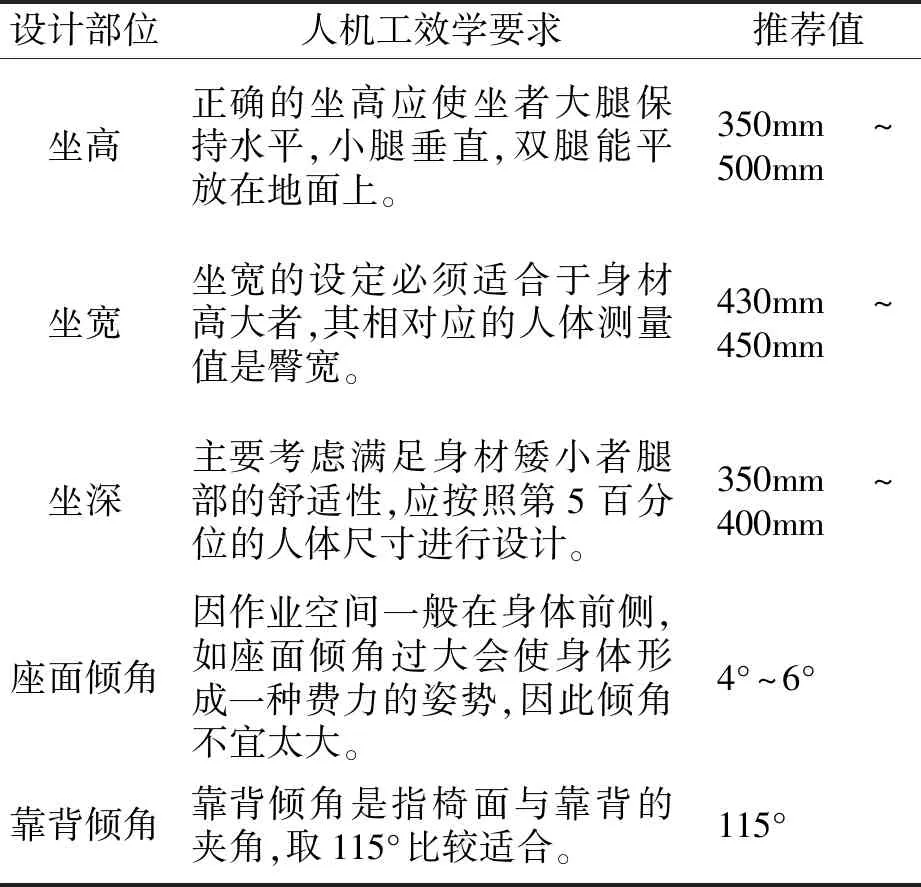
表1 工作座椅主要设计部分及要求[1]
1.2 周期变距杆和总距杆的人机工效设计原理
周期变距杆和总距杆都属于控制杆,设计时应依照控制杆的人机工效准则。周期变距杆具有前后推拉、左右摆动和圆锥运动等形式。杆长应依照杆的位移量和操纵力大小来决定。周期变距杆的位移量随着杆的运动形式而有所不同,周期变距杆前后推拉时,最大位移量为350mm;周期变距杆左右运动时,最大位移量为950mm。周期变距杆的操纵角以30°~60°为宜。
总距杆属于比较特殊的一种控制杆,主要为上下运动,如图1中所示。总距杆左边缘与座椅中心线距离推荐值在290mm~315mm之间,总距杆沿y轴向上最大距离为340mm,沿y轴向下最大位置为第5百分位人体手臂长与总距杆的交点位置P,x方向位置为距离座椅中立位置参考点76mm左右。
1.3 脚蹬人机工效设计原理
作用于脚蹬上的力大小与腿部膝关节的角度相关:当作用于脚蹬上的力小于227N时,膝关节角度以107°为宜;当作用于脚蹬上的力大于227N时,膝关节角度以130°为宜。
通常情况下,脚蹬与坐姿有推荐的一些参考角度值;大腿与座椅夹角α取10°~15°,脚与胫骨间的夹角γ取90°~120°,膝关节角β取90°~150°。如图2所示。

图1 总距杆位置原理图[2]
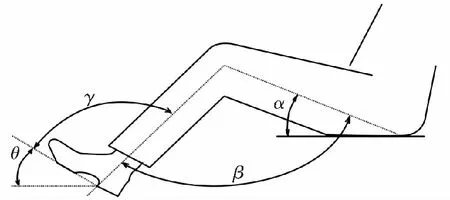
图2 脚蹬与坐姿位置示意
2 人机工效设计计算
2.1 脚蹬人机工效设计计算
脚蹬位置的确定要以人体髋点(H点)为基准,根据下肢各关节角度在舒适范围内变化的要求确定脚部踵点(AHP点)位置,再将踵点(AHP点)的位置变化转化为座椅的调节量。首先建立人体下肢模型如图3所示。
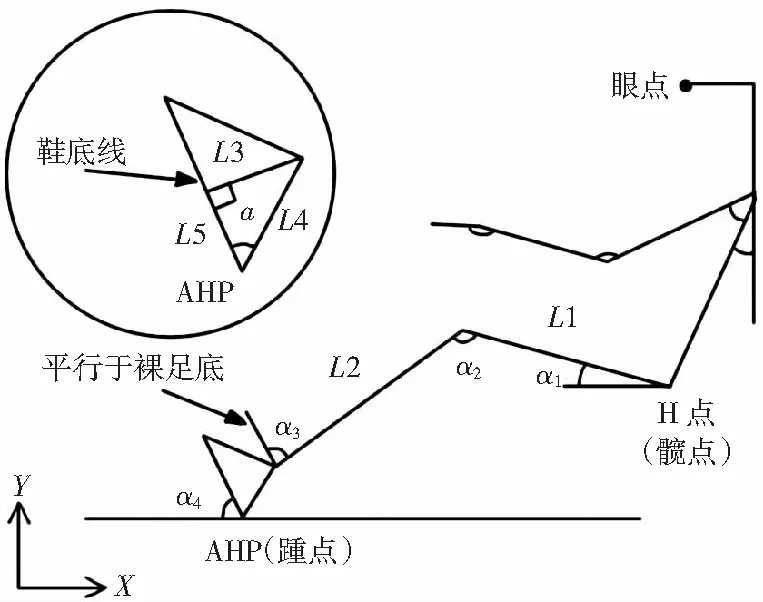
图3 人体下肢简化模型
根据几何关系可得AHP点位置:
α1+α2=α3+α4(1)
x=L4cos(180-α4-α)+
L2cos(180-α1-α2)+L1cosα1(2)
y=L4sin(180-α4-α)+
L2sin(180-α1-α2)-L1sinα1(3)
α1,α2,α3,α4为人体下肢关节的活动角度范围,舒适范围如表3。当α4取某一舒适角度,并给定α1时,则可由公式(2)和(3)计算出α2和α3在舒适范围变化的一条AHP点线。当α4取不同值,就可以得到同一α1下的AHP点舒适曲线。分别带入P5、P50、P95位人体数据(见表2)进行计算,可以得到某一α1下不同人体百分位的AHP点舒适曲线。不同角度α1的AHP点舒适曲线就对应人体的AHP点舒适区域。

表2 人体模型线性尺寸[3]

表3 角度说明[4]
取α4=45°,α1分别取5°、10°、15°和20°四个值进行分析计算。将第5、50、95百分位人体数据带入Matlab中计算并拟合出不同α1取值情况下的AHP点舒适曲线图形,如图4所示。
由图4可以得到如下结论:
1) 要使第5百分位人体AHP点在舒适范围,AHP点离H点水平距离约为620mm,垂直距离约为270mm。
2) 要使第50百分位人体AHP点在舒适范围,AHP点离H点水平距离约为650mm,垂直距离约300mm。
3) 要使第95百分位人体AHP点在舒适范围,AHP点离H点水平距离约680mm,垂直距离约320mm。
4) 由AHP点相关计算可知,要使不同百分位人体AHP点舒适区域重合,座椅在水平方向上具有60mm左右的调节量,在垂直方向上具有50mm的调节量。
5) 座椅位置依照第50百分位人体尺寸设计,可以使第5和95百分位尺寸人体都达到AHP点舒适域,且能使座椅的调节量最小。

图4 第5、50、95百分位AHP点舒适区域
2.2 周期变距杆人机工效设计计算
要确定周期变距杆的位置,应以座椅位置为参照,周期变距杆的设计应该考虑使人体右手操作在舒适范围内。为了便于分析,现将问题转化为二维俯视图和二维侧视图求解。在俯视图中,肩关节向身体内侧的旋转角度αx为0°~50°;在俯视图中,肩关节向躯干上侧的旋转角度αz为15°~35°;肘关节弯曲角度αy为60°~100°(以上为针对驾驶时的舒适角度)[5];靠背角αo取17°,如图5所示。

图5 上肢连杆投影图
如图5将上肢连杆在中心垂直面上投影,设髋点为坐标原点,则可通过集合关系得到手参考点的坐标值。
(4)


根据表4所示上肢线性尺寸和取αx、αy、αz为舒适的角度时,就可以由式(6)和式(7)计算出驾驶员握点的舒适域,从而为周期变距杆的设计提供依据。再代入Matlab计算:αx取一舒适值20°。由于αy值(60°~100°)的变化对于αz值(15°~35°)的影响较小,αz可分别取15°和35°,αy取60°~100°间某一步长变化。这样可以得到某一αx的两条舒适线,两条曲线间区域就为对应αx的手舒适域。图6为Matlab中绘制的二维图形。
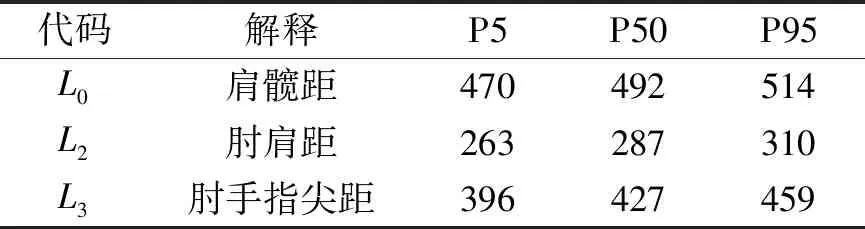
表4 上肢线性尺寸[3]
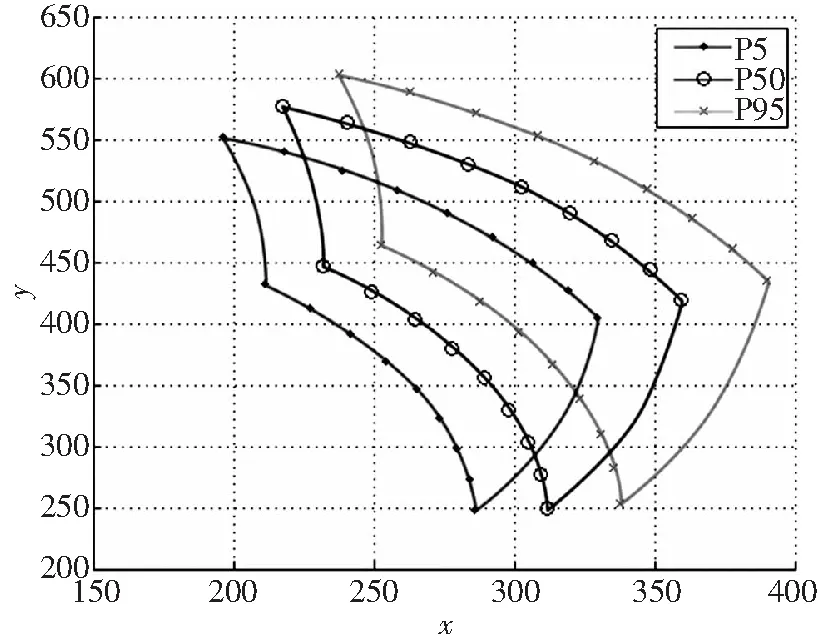
图6 第5、50、95百分位右手舒适区域
由图6可以得到如下结论:
1) 要使第5百分位人体右手落在舒适范围内,右手参考点距离H点水平距离约为280mm,垂直距离约为430mm。
2) 要使第50百分位人体右手落在舒适范围内,右手参考点距离H点水平距离约为300mm,垂直距离约为440mm。
3) 要使第95百分位人体右手落在舒适范围内,右手参考点距离H点水平距离约为320mm,垂直距离约为450mm。
4) 由右手相关计算可知,要使不同百分位人体右手参考点舒适区域重合,在水平方向上具有40mm左右的调节量,在垂直方向上具有20mm的调节量。
5) 依照第50百分位人体尺寸设计周期变距杆,加入座椅的调节量,能使第5百分位和第95百分位尺寸的人体右手落在舒适域内。
2.3 总距杆人机工效设计计算
总距杆位置计算公式与周期变距杆一样,由于操作方式不同,αx取一舒适值15°,αz可分别取15°和35°,αy取60°~100°间某一步长变化(以上针对操作总距舒适位置)。这样可以得到某一αx的两条舒适线,两条曲线间区域就为对应αx的左手舒适域。图7为Matlab中计算得到的左手舒适区域。

图7 第5、50、95百分位左手舒适区域
由图7可以得到如下结论:
1) 要使第5百分位人体左手落在舒适范围内,左手参考点距离H点水平距离约为290mm,垂直距离约为435mm。
2) 要使第50百分位人体左手落在舒适范围内,左手参考点距离H点水平距离约为315mm,垂直距离约为450mm。
3) 要使第95百分位人体左手落在舒适范围内,左手参考点距离H点水平距离约为340mm,垂直距离约为465mm。
4) 由左手相关计算可知,要使不同百分位人体左手参考点舒适区域重合,在水平方向上具有50mm左右的调节量,在垂直方向上具有30mm的调节量。
5) 依照第50百分位人体尺寸设计总距杆,加入座椅的调节量,能使第5百分位和第95百分位尺寸的人体左手落在舒适域内。
2.4 计算结论
将以上计算结果进行整合,得出基于第50百分位人体舒适姿势的直升机座舱操纵机构布局模型,踵点x方向距离髋点650mm,y方向300mm;右手参考点x方向距离髋点300mm,y方向450mm;左手参考点x方向距离髋点320mm,y方向150mm;座椅的调节为前后60mm,上下50mm。如图8所示。

图8 操纵机构布局模型
3 人机工效验证
3.1 模型导入
以某型直升机驾驶舱为例,将第50百分位飞行员人体模型置于其中,使人体处于操作状态,如图9所示。

图9 人-机模型
3.2 姿势评价
将计算得出的第50百分位人体各部位舒适区域叠加到该型机人机模型中,如图10所示,观察各部位参考点及舒适区域。
由图10可见,除脚部参考点之外,左右手参考点均不同程度地偏离舒适区域。由于该机型座椅没有垂直方向上的调节量,因此可以判断该机总距杆和周期变距杆无法处于手部舒适区域。

图10 舒适区域验证图
4 结论
本文通过分析直升机驾驶舱人机工效设计的相关参数与原理,建立了直升机座舱操纵机构人机工效分析数学模型,研究了不同百分位下人机操作舒适度区域。以某型直升机座舱操纵机构人机布局为例对所提方法进行了舒适性验证。结果表明,现有直升机的总距杆和周期变距杆设计均偏离舒适区域较大,说明传统直升机操纵方式从在人机工效方面存在问题,需进一步优化改进。同时,论文也为下一步的直升机侧杆操纵机构人机工效研究提供了一种思路。
