模糊神经网络PID算法在输油泵系统中的控制研究*
2019-06-18杨盛泉
龚 晨,杨盛泉
(西安工业大学 计算机科学与工程学院,西安 710021)
PID控制是较早发展的控制策略之一,由于其控制简单可靠性较好,被广泛的应用于工业过程控制之中,PID控制器具有三个调整参数,其中:KP为比例调节系数,作用是加快响应速度,KI为积分调节系数,其作用是根据误差值加大或者缩小控制量,KD为微分调节系数,作用是避免出现超调现象,改变系统动态性能。油田输油泵属于大容量输油泵中的一种,它的流量,出入口压力的稳定是输油泵系统安全高效运行的关键,由于输油泵控制系统受到环境和原油特性等各方面因素影响,常规的PID控制难以对输油泵进行精确稳定控制。
PID控制和模糊PID控制在很多领域都有广泛的应用。文献[1]设计的积分分离PID控制器应用在电阻炉温度控制系统,在控制精度和稳定性方面都具有不错的效果。文献[2]提出的将PID控制器的参数作为粒子群中的粒子,系统控制精度作为粒子的寻优目标,通过粒子搜索找到最优PID控制参数,从而对电机进行精确的控制,仿真结果表明,粒子群算法的PID控制器提高了永磁同步电才系统控制精度,为永磁同步电机优化设计提供了科学依据。文献[3]提出的模糊PID控制器应用于煤矿交流伺服电机系统中,具有很好的动态性能和鲁棒性。文献[4]设计的模糊自整定PID控制器应用在四旋翼无人机悬停控制中,该控制器在控制速度和稳定性方面有很好的效果。但是随着技术的不断发展以及控制要求的提高,传统的PID控制有时也难以满足需求。
随着智能控制技术,如模糊控制[5],神经网络控制[6-7]等,以及传感器技术的不断发展,控制技术也越来越成熟。模糊神经网络的自适应能力强,灵活性高可以解决传统PID控制的不足[8-9],而常规的PID控制又可以解决模糊神经网络的控制精度不足问题[10]。本文拟综合PID控制简单,模糊控制不依赖模型,神经网络控制自适应的优点,采用模糊神经网络PID控制来对油田输油泵进行精确控制。
1 输油泵控制系统结构组成及主要控制指标
输油泵控制系统主要是由计算机、变频器、PLC、电机、油泵本体及各种传感器组成。控制整个系统的计算机为中枢系统,其作用是实现控制算法、数据存储、数据修改、数据显示以及控制系统出现异常时实现报警,是实现人机对话的关键;PLC是可编程逻辑控制器的简称,其作用是执行逻辑运算,完成系统的整体控制,参数检测以及完成由计算机传递过来的指令;变频器主要是通过更改电机的实时电压以及频率来改变电机的转速变化,从而实现对输油泵出口压力、入口压力、流量、油泵的温度、环境燃气浓度的控制,而这些参数将通过A/D转换传递给中央计算机,计算机以数据形式显示出来;传感器的作用则是采集各种所需要的参数信息。图1为输油泵控制系统结构组成图。
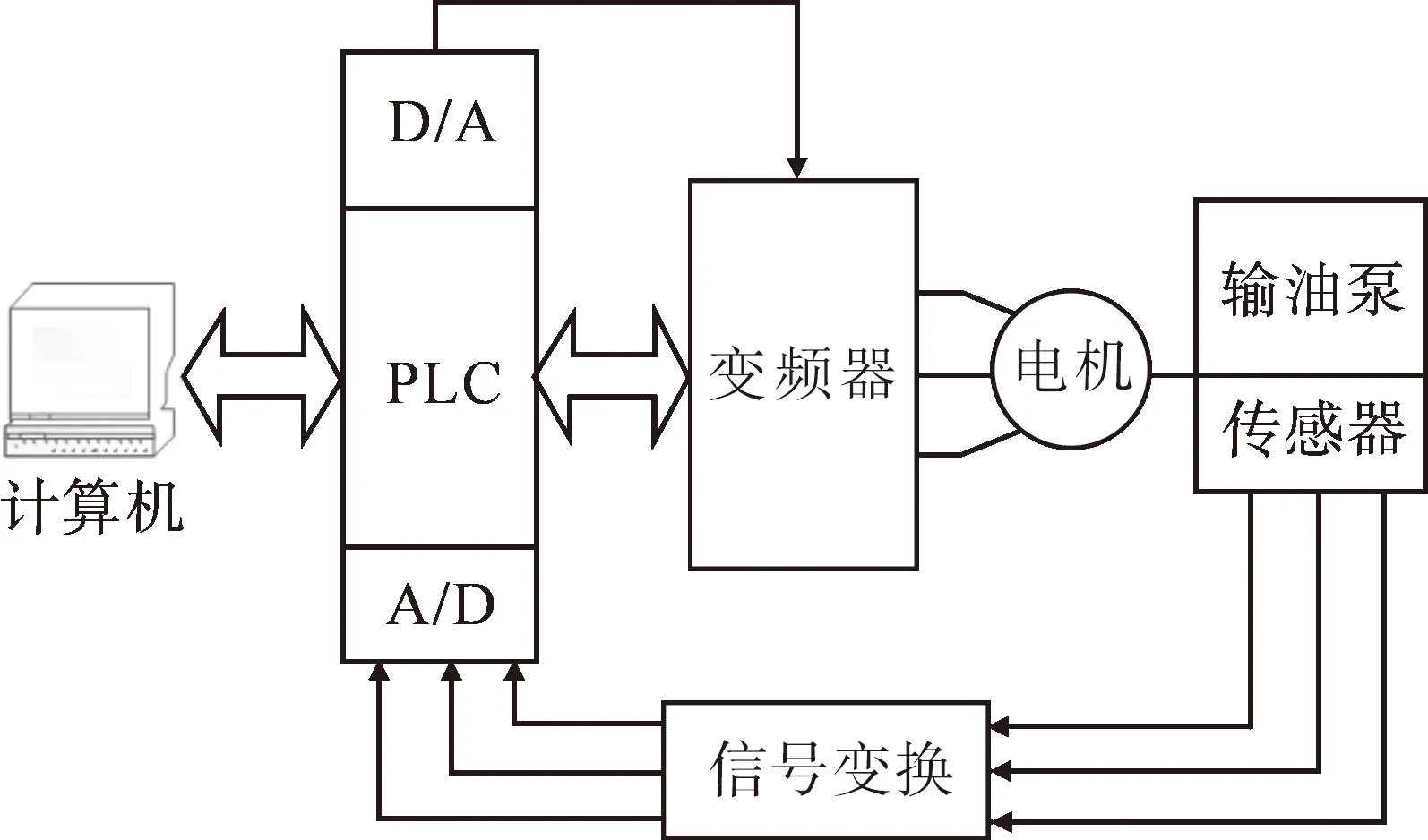
图1 输油泵控制系统结构图
输油泵控制系统的主要控制性能指标有:
1) 高效性η:输油泵控制系统能够在给定的信号参数作用下,快速的对系统进行调整控制;
2) 精确性θ:能够对输油泵的出口压力,入口压力,流量进行精确控制;
3) 稳定性ψ:输油泵一般分布于情况较为复杂恶劣的环境中,在外部环境温度、适度、原油油品特性、管道特性等一系列不定因素影响之下,输油泵控制系统对输油泵的控制应该在允许的误差范围之内,从而使生产能够稳定运行;
4) 能够在正常情况下实现对输油泵系统的自动调节,减少人工的干预,减轻工人的劳动强度;
5) 根据控制的要求,能够分清出入口压力,流量优先级以及协调性。
2 模糊神经网络PID控制器设计
本文中模糊神经网络PID控制器组成结构主要分为三个部分:
1) PID控制器模块,PID控制器直接对控制对象进行控制,PID控制的三个参数KP、KI、KD为在线自整定式[5]。
2) 模糊化模块,对输入参数进行模糊化和归一化处理,根据模糊控制的非线性特性,根据控制查询表以及模糊规则,可以对输入参数进行一个预处理,使输入数据与输出数据避免相差太大,也可以使神经网络的初始权值与理想权值相差不大,减少神经网络权值调整次数,节省控制时间,提高调整效率。
3) 神经网络模块,经过大量的数据学习训练,神经网络可以实时动态调整输入输出压力,流量,不断调整使系统达到最优效果,以达到输油泵稳定运行,从而达到自适应控制,减少人为的干预,该模糊神经网络PID控制器的结构如图2所示。
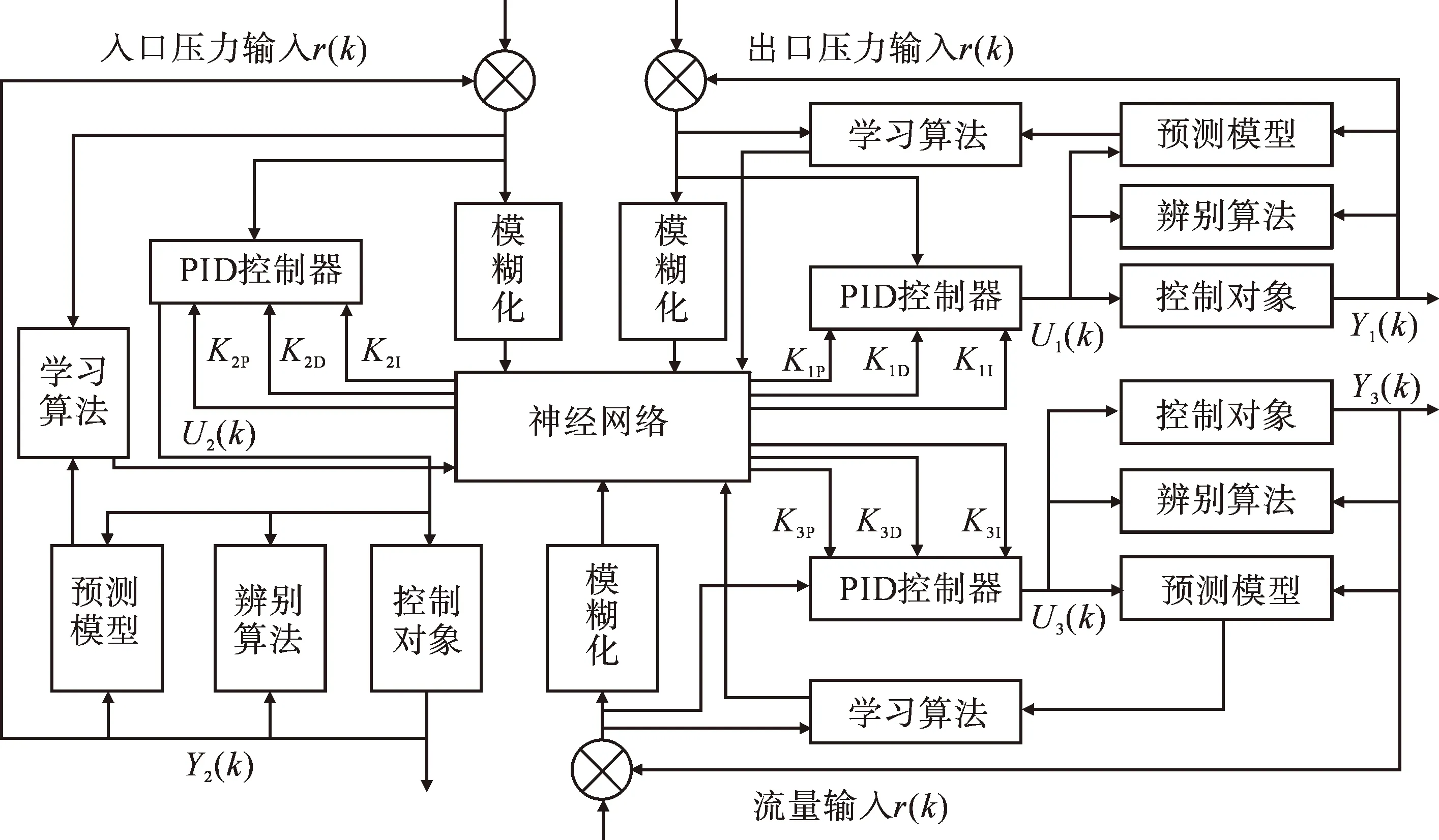
图2 模糊神经网络PID控制器结构图
2.1 模糊化模块
模糊神经网络PID控制中的模糊控制模块主要作用是对系统误差量ek和系统的误差变化率Δek进行模糊化处理,处理后数据将作为神经网络模块的输入数据,其结构如图3所示。

图3 模糊化模块结构图
模糊化模块的工作过程如下:
① 确定系统的输入变量,一般是指系统误差变量ek和系统的误差变化率Δek(其中Δek=ek-ek-1),确定系统的输出变量一般分为控制输出和PID三参数输出两种情况;
② 确定每个变量的模糊子集,子集中的元素称之为语言值;
③ 确定每个语言值的论域;
④ 确定隶属度函数,论域值可以是分散的,也可以是连续的,根据具体状态的不同,表示形式也不同;
⑤ 确定量化因子;
⑥ 模糊量的精确计算,常使用的模糊量精确计算方法为重心法;
由两个隶属度函数表和模糊控制规则表可以得到最终的输出控制查询表。
模糊控制的控制输出表计算过程如下:
① 假定三个参数X1,Y1,Z1,其中X1取值为(1,0.8,0.7,0.4,0.1,0,0,0,0,0,0,0,0),Y1的取值为(1,0.7,0.3,0,0,0,0,0,0,0,0,0,0),另取Z1=Y1,为了增加系统的鲁棒性和隶属度 函数的分辨率,模糊集合的论域取值要分散一些,初步取定为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};

③R=r×Z=(r1i∧z1j)=(min(r1i,z1j)),其中r以列向量形式表现;
④ 根据模糊控制的规则表可知,Ri总共需要计算56个,其中R=R1R2…R56;

⑥ 清晰化输出得到最终的模糊控制输出表。
在计算模糊控制输出表之前,需要先确定出x,y,z的隶属度函数和模糊控制规则表,隶属度函数表可以根据经验来确定,模糊规则表可以查询相关的书籍可得,由表1,2,3的语言变量x的隶属度函数表和语言变量y以及语言变量z的隶属度函数表,再结合模糊控制规则表可得模糊控制输出表。
图4为采用matlab工具得到的控制输出表,模糊控制输出表也可以称为控制表,或实时查询控制表,表中的数值反映的是误差和误差变化量与控制输出量化值之间的关系。控制存在有余差,如果在模糊控制基础上再加上常规PID控制,则可消除余差,此时成为复合模糊控制。
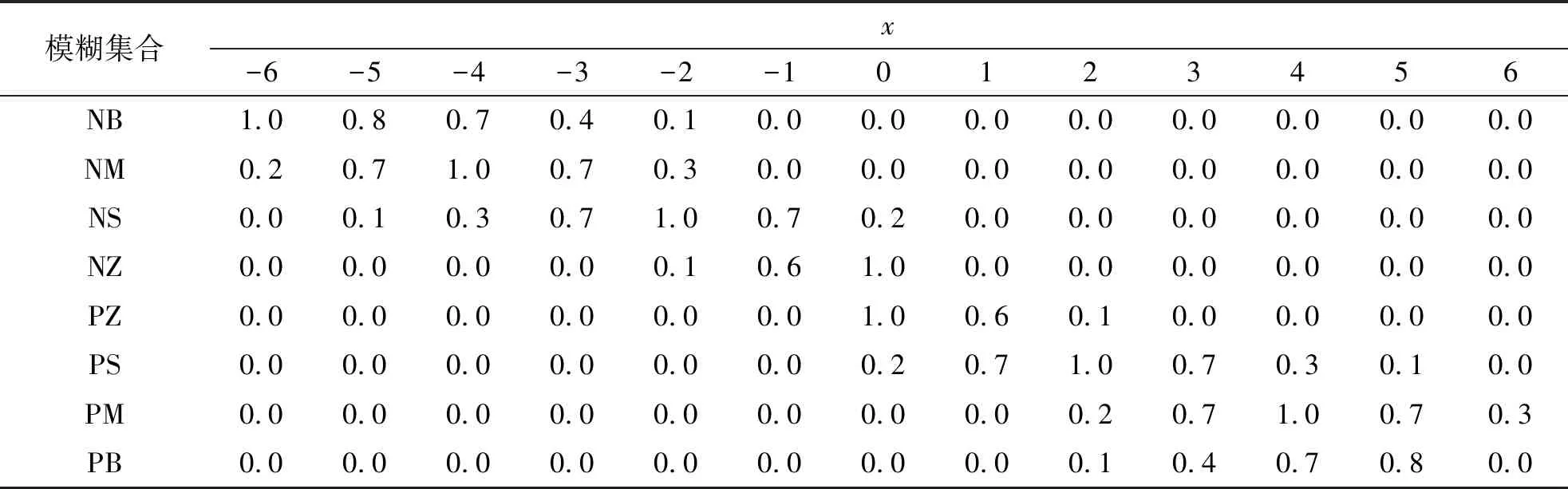
表1 x的隶属度函数表
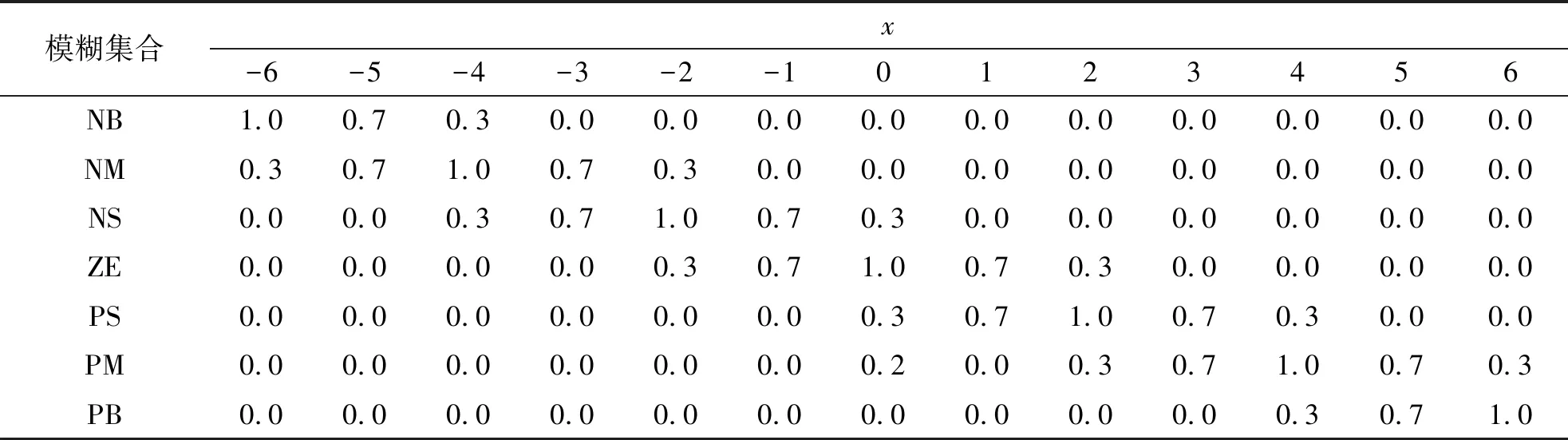
表2 y和z的隶属度函数表
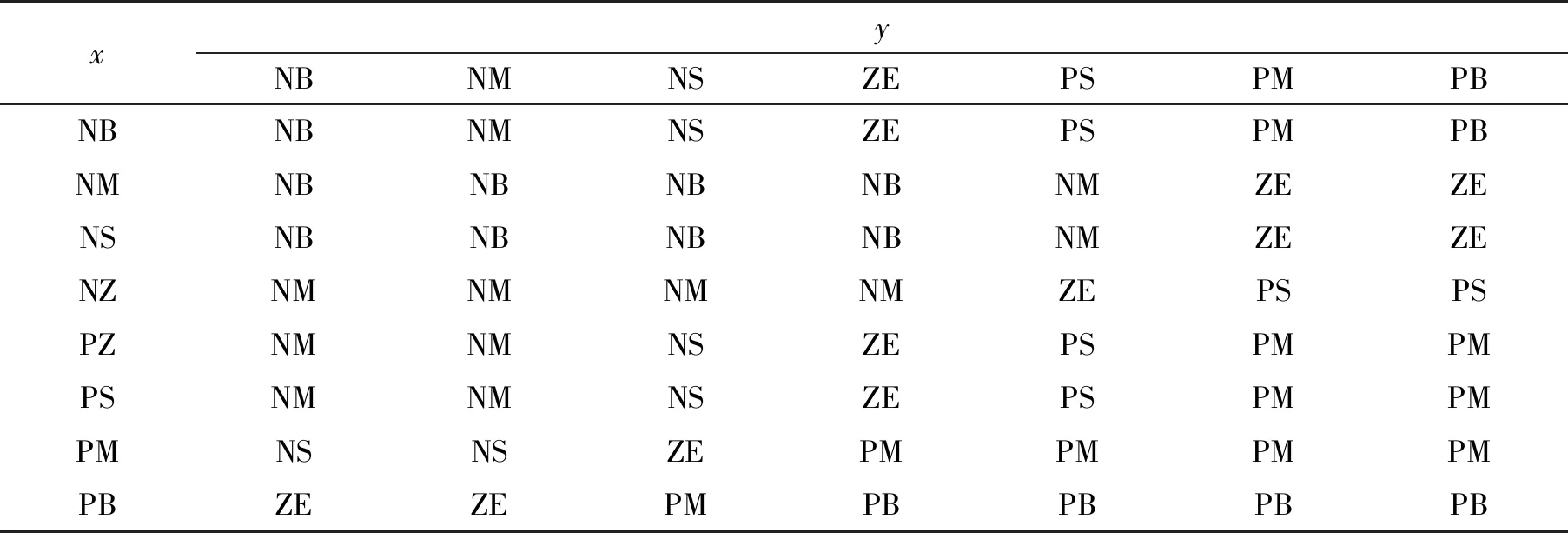
表3 模糊规则表
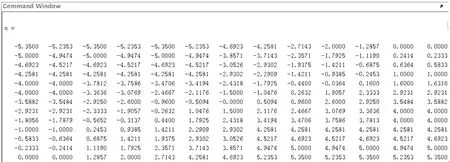
图4 模糊控制输出表
2.2 神经网络模块
本文设计的神经网络模块分为四层:输入层,模糊化层,模糊推理层和输出层,其输入层节点对应输油泵系统需要控制的参数,即出入口压力、流量、温度,输出层节点数对应PID的三个参数,神经网络模块的作用是通过传感器采集到相关参数,然后经过神经网络对大量的数据训练学习,控制器能通过不断调整各层次的权值系数来不断优化输油泵的实时参数,以达到自适应调整的功能,其结构如图5所示。
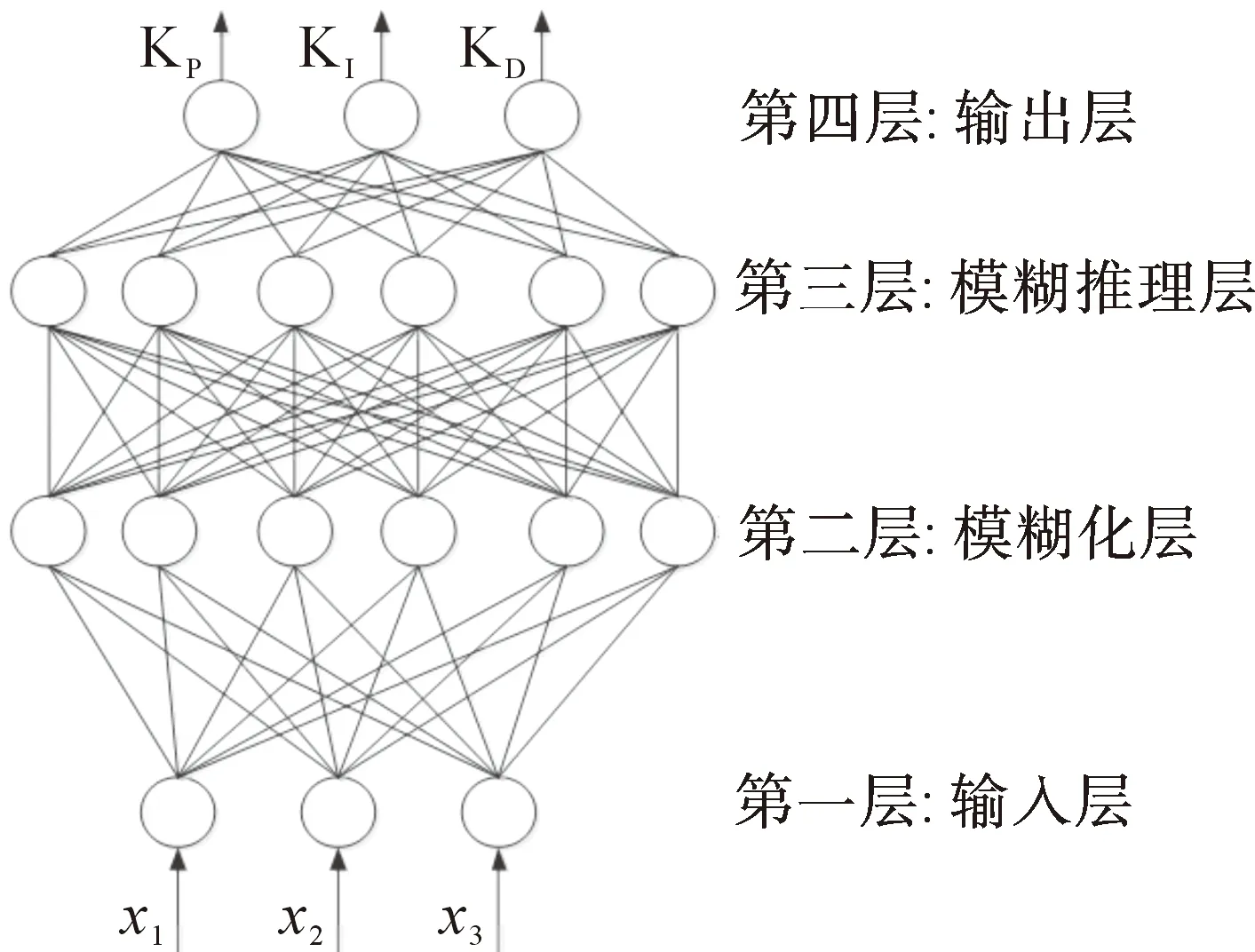
图5 神经网络模块结构图
第一层为神经网络模块的输入层,这一层中的每一个神经元节点表示系统的一个输入变量,因为本系统需要对油田输油泵的入口压力,出口压力和流量3个参数进行控制,故该模糊神经网络PID控制的神经网络模块输入层由3个神经元,即3个节点。该层的主要作用是神经元将输入变量的值通过作用函数传递给模糊层的神经元,这一层的输入输出表示为
(1)
(2)
节点数:N=n(n为输入参数个数)
第二层为模糊化层,该层中的每个神经元用于模拟输入变量的隶属度函数,该层的输入输出表示为
(3)

(4)
该神经网络模块模糊化层采用高斯函数,cij和bij分别是第i个输入变量的第j个模糊集合隶属度函数。
第三层为模糊推理层,通过与上层的模糊层连接,该层与上层的连接通过一个矩阵w来实现,作用是实现模糊模块的模糊规则的匹配,每个神经元节点之间实现模糊运算,这是通过“乘”算子使用上层的输入模糊量,以得到该层的输出值的。该层的输入输出表示为

(5)
(6)
第四层为神经网络模块的输出层,即PID控制的三个参数KP、KI、KD的整定结果,该层的输入输出表示为
(7)
(8)
wij为模糊推理层到输出层的权值系数,PID的三个参数输出表示为
(9)
(10)
(11)
2.3 PID模块
常见的PID控制算法分为三类:增量式PID算法、位置式PID算法、微分先行PID算法,本模糊神经网络PID控制器的PID模块采用经典增量式PID控制器,增量式PID算法的输出与当前系统误差以及前两次的系统误差有关,避免了位置式PID算法需要考虑过去误差的累计量这一缺点,从而具有更好的控制精度,另外,增量式PID算法输出量是系统与系统增量有关,当系统发生错误,其本身具有的记忆功能可以使系统保持原位,从而使系统错误带来的影响减到最小,不会严重影响系统稳定工作,增量式PID算法控制算式为
Δu(k)=u(k)-u(k-1)=KP(ek-ek-1)+
KIek+KD[ek-2ek-1+ek-2]
(12)
其中,Δu(k)为系统输出控制量增量,u(k)和u(k-1)分别为第k次的输出量和第k-1次的输出量,ek、ek-1、ek-2分别为第k次、第k-1次、第k-2次的系统误差。
2.4 模糊神经网络PID学习
由于油田输油泵存在于山川、荒漠和旷野等复杂地形之中,系统运行时是时变的,非线性的,因此神经网络需要根据输入输出压力以及流量的变化,实时的对权值系数进行不断的调整,以便输油泵系统达到最佳的控制效果,也就是需要对模糊模块的模糊规则进行不断调整,对在线网络学习的性能指标函数E(k)进行定义:
(13)
式(13)中的r(k)和y(k)分别表示神经网络系统的理想输出与实际输出,由此我们可以得到每次的迭代误差ek=r(k)-y(k),为了使系统的实际输出与理想输出接近,则性能指标函数E(k)应该最大限度的接近于0.我们对模糊神经网络PID算法的高斯函数的中心cij,宽度bij以及神经网络模块的网络连接权值wij进行修正,可得:
神经网络权值系数为
(14)
神经网络中心向量为

(15)
神经网络基宽为

(16)
根据实际情况考虑因子之后,输出的权值为
wij(k)=wij(k-1)+ Δwij(k)+α(wij(k-1)-wij(k-2))
(17)
式中:k为迭代次数;α为动量因子。
模糊化层和模糊推理层相当于神经网络的隐含层,输入输出层也类似于神经网络的输入输出层,输入层输入的信息经过隐含层作用于输出层节点,然后产生输出信号,神经网络训练的数据一般为系统误差ek以及实际输入与期望输出的偏差,通过反复调整输入层与隐含层以及隐含层与输出层的连接矩阵取值w,确定出最小误差的权值系数以及阈值,此时的数据,经过查找训练的神经网络模型,可以在训练样本中找到与之相似的数据,然后神经网络会自行对数据进行处理,从而得到误差最小的经非线性转换的信息。
模糊神经网络PID算法运行过程如下:
① 根据控制的参数类型及数量,确定定神经网络模块的输入层节点数,模糊化层,模糊推理层的节点数,PID控制修改的主要参数为KP、KI、KD,输出层的节点数确定为3个,并给出每一层的加权系数的初始值,加权系数初始值初步确定为1;
② 根据输油泵系统的控制参数确定参数矢量,以便形成控制器的预测模型;
③ 采集输油泵系统的理想输出值r(k),实际输出值y(k),可以得到系统误差值ek;
④ 将得到的系统误差值ek送入模糊化模块进行模糊处理,输出值作为神经网络模块的输入值;
⑤ 根据各层的输入输出公式,神经网络的输出值即为PID控制的三个参数;
⑥ 计算修正模糊化层,模糊推理层及输出层的权值系数;
⑦ 使k=k+1,重新回到第二步继续循环计算,直到权值系数调整到系统最适合时期。
3 实验及分析
利用Matlab R2016b软件中的Simulink仿真工具对本文的模糊神经网络PID控制算法进行仿真实验评价,使用Simulink中的S函数来实现控制规律,可以避免直接编程,减少因大量使用复杂源代码而带来的麻烦,并且,此工具的编程比较简单,调试方便,大大减轻了仿真评价中的工作量,仿真过程中将对常规的PID控制,模糊PID控制,模糊神经网络PID控制这三种控制算法的控制速度,控制稳定性等进行对比分析。
假设被控对象的传递函数为
其中T1=1,T2=1,=0.3,模糊话因子为0.01,解模糊因子k1=0.5,k2=0.05,k3=0.05,PID的三参数初始值取值为KP=6.5,KI=1,KD=3.5,建立Simulink模型,为了使函数分辨率更好,模糊论域0附近的取值要分散些,初步取定为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},建立模糊神经网络PID控制的仿真模型,最终得到的单位阶跃响应曲线如图6所示。
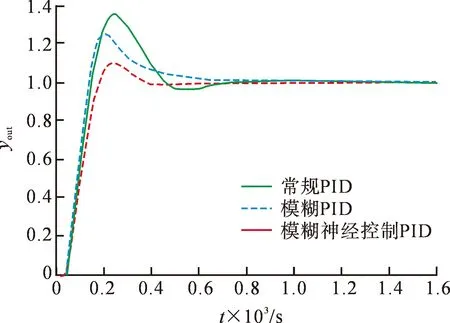
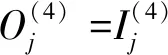
图6 三种控制算法单位阶跃响应曲线
图6中的三条曲线分别为常规PID控制,模糊控制,模糊神经网络PID控制的单位阶跃响应,图中可以看出模糊神经网络PID控制到达1的速度稍慢于常规PID控制和模糊控制的,这是由于模糊神经网络PID控制不断调整权值系数需要一定时间的特性决定的,而模糊神经网络PID控制回到理想状态的速度远远快于常规PID控制和模糊控制,在超调量方面,本文算法相较于常规PID,超调量较少约20%,相较于模糊PID,超调量减少了约9%,另外,可以看出,模糊神经网络PID控制的控制稳定性明显优于其他两种控制器。
为了进一步验证所提出算法的抗干扰能力,在给定的传递函数基础上,对其加上扰动,三种不同控制方法的阶跃响应曲线如图7所示。
由图7可以看出,加入扰动后,模糊神经网络PID控制算法恢复到稳定状态的时间小于PID控制算法和模糊PID控制算法。在抗干扰能力方面,本文设计的算法具有较好的性能。
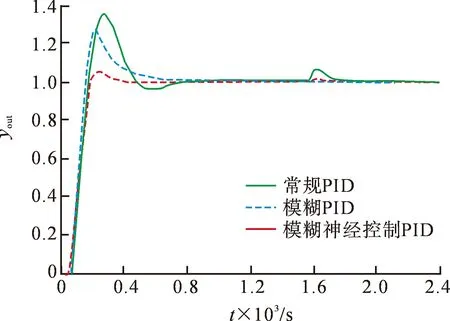
图7 三种控制算法抗干扰能力效果图
4 结 论
本文结合常规PID简单,模糊控制不依赖于模型,神经网络的在线自适应能力等优点,提出的模糊神经网络PID控制算法应用于油田输油泵控制系统上,模糊神经网络PID控制确定好输入层,隐含层节点数后,通过模糊化模块对系统的输入输出误差进行模糊处理,然后作为神经网络的输入参数,通过神经网络的学习,以加权系数形式展示出来,通过不断的修改加权系数可以对系统进行动态稳定控制,PID控制的三个KP、KI、KD参数在模糊神经网络自学习以及加权系数的调整情况下,不断的进行动态调整,从而得到不同状态下的最优参数。
仿真实验表明,模糊神经网络PID控制算法在控制精度,控制稳定性上优于模糊控制和PID控制,另外模糊神经网络PID控制的在线自适应调节能力,不但调高了油泵运行的稳定性,还能减少人工调节输油泵控制系统的次数、延长设备寿命、降低企业生产风险,本文提出的控制策略与方法满足实际控制要求,有一定的实际应用价值。