基于单片机的智能攀爬机器人的设计与实现
2019-06-17颜翠翠张浩浩韩欢孙梦杰
颜翠翠 张浩浩 韩欢 孙梦杰

摘 要:该文基于STC89C52单片机,采用真空负压原理设计了一款能够在直立墙面、顶部爬行的智能机器人,小车能够实现在墙面上循迹、避障、实时视频传输的功能,可用于高楼环境下的拍摄、军事侦察、灾后寻找伤员、高空作业等多种场景。
关键词:攀爬 高楼 吸附
中图分类号:TP242 文獻标识码:A 文章编号:1672-3791(2019)03(a)-0033-02
随着城市高楼的不断兴建,楼房、工业建筑越来越高,对于高层建筑的作业需求随之而来,爬墙机器人也因此成为未来发展的一个趋势,当高层发生火灾、地震等紧急情况,救援人员无法进入狭隘的环境或越过高墙了解内部情况,或者对楼房结构、高层玻璃质量检修时工作人员往往无法上升至高层,了解楼层建筑结构,现场画面。这些工作都很重要,但是又极度危险。这时就需要体积较小且能沿着墙面攀爬的搜救设备进入人员被困位置,检测人员状况,探测复杂地形,方便救援人员制定方案进行救援。因此研究人员制作了一款能够爬行在直立墙面的一款攀爬机器人,来替代人们进行危险高层作业。
1 系统总体设计
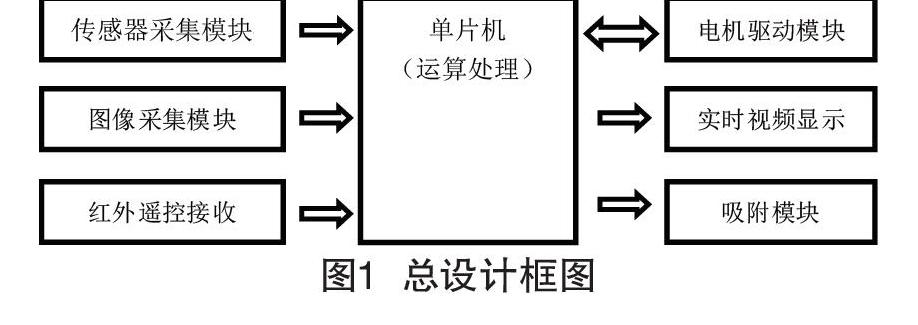
智能攀爬小车系统总体设计方案,如图1所示。
基于上述框图设计,可实现一款集沿垂直墙面或顶层攀爬,具备避障与实时画面传输功能为一体的智能攀爬小车的设计。各阶段具体实施方案如下。
(1)使用真空负压原理[1],使机器人内部产生瞬时真空,和外界大气压形成负压差,使机器人紧紧吸附在墙壁、玻璃等平面上,实现机器人吸附墙壁功能。
(2)采用光电传感器循迹和探测障碍物,实时反馈到控制系统,即时避障。摄像头实时传输画面,辅助人为避障。实现避障功能。
(3)利用WiFi传输技术构建数据采集无线传输模块实现图像传感器与设备主控端的通信实现实时视频传输功能。
(4)最终实物利用3个离心式风机,达成吸附墙面功能;4个驱动轮,实现行走功能;红外发送接收传感器,摄像头等实现信息采集功能;使用单片机对功能进行数据整合运算,采用WiFi视频传输进行数据接收。
2 系统硬件设计
2.1 吸附功能的实现
此设计的核心在于爬墙吸附功能的实现,在小车的中部布置3个可以抽风的风扇组成一个离心式风机系统,由车身底部的直流电机高速旋转带动风机叶轮,使空气高速排出,从而在车身底部的空气不断地补充到风机系统中,致使车身内部空间产生瞬时真空,和外界大气压形成负气压差,来满足吸附的实现。但是由于叶片抽风的过程中空气还会不断地快速流失,导致负压差会过小难以吸附牢靠,因此笔者在离心机系统的基础上增加了耐磨的布条来减少空气快速的流失,在经过改进后此负压差将被扩大,攀爬小车才能够紧紧吸附在墙壁、玻璃等平面上,从而达到使攀爬小车车附着在墙面等垂直或水平平面上的效果。
2.2 硬件电路设计
在此次设计中基于STC89C52为主控芯片[2],通过对单片机最小系统、避障电路、循迹电路、数码管显示电路、功能切换按钮、电机驱动电路、稳压电路以及遥控电路进行设计,最终完成了智能攀爬小车硬件电路总设计图如图2所示。
在攀爬机器人前部安装有循迹传感器与避障传感器,以实现机器人的智能循迹功能以及遇到障碍物时避障的实现;功能切换按钮和数码管显示电路安装在机器人中部用于功能的切换与显示,实现设定程序的转换;遥控电路也搭配在机器人中部采用HS0038一体化接收头为单片机进行遥控信号的检测,从而实现遥控控制机器人的行走;驱动电路采用一款价格低廉的双驱动芯片L293D来完成4台电机的正反转,利用差速控制小车前后左右行走。设计中选择LM7805稳压芯片实现电路电压需求。
3 系统软件设计
智能攀爬机器人软件部分也是整个系统的核心部分之一,我们不仅需要硬件部分,还需要加上软件部分才能使机器人整个系统运行起来。该系统主要由避障模块子程序、循迹模块子程序、遥控模块子程序构成。
系统软件设计中,由于避障模块、循迹模块,以及遥控模块可同时实时检测扫描,这种模式不仅占用CPU,且多个程序同步运行会产生冲突。故该设计将各个模块的程序集中嵌入到一个遥控器中,该方式不占CPU且便于控制。
4 结语
该文通过系统总体方案、硬件设计、软件设计,最终实现了智能攀爬机器人的设计。论文主要阐述了智能攀爬机器人基本功能的设计及实现方法,初步实现了机器人自主墙面攀爬运行的实现,在今后的实践过程中,为了完善机器人的功能,可以装设其他所需要的传感器和装置,如人体传感器、墙面勘测传感器、灭火装置、玻璃清洁装置等,扩展攀爬机器人的应用领域。在高楼不断兴建的背景下,攀爬机器人将会进入人类日常生活当中,如墙面修补、墙面探测、墙面清洁等具有一定危险程度的高层工作,终究有一天会被爬墙机器人所替代。因此该研究的智能攀爬小车是一个平台,可以搭载轻质量的工具进行墙面工作,也可以搭载相应的传感器进行相应的墙面检测工作。
参考文献
[1] 王惠霄,张秀敏,M.R.Horgan.真空吸附技术[J].轻工机械,1998(4):41-42.
[2] 喻伟闯,王铭,付豪,等.基于STC89C51单片机的避障移动机器人的设计与实现[J].湖北民族学院学报:自然科学版,2016(1):60-63.
