基于AMESim 与Simulink 的探矿船四锚定位电液控制系统的研究
2019-06-17朱一杰胡即明周建飞张玉莲
朱一杰,胡即明,周建飞,张玉莲
(浙江海洋大学东海科学技术学院,浙江舟山 316004)
液压绞车是利用液压马达或通过减速齿轮机构来拖动滚筒的一种提升机械[3],郑文杰等[4]采用成功导向理论,建立某型锚机的可靠性模型,对其可靠性与可修复性进行分析,为锚机液压系统可靠性提供了依据。随着电液控制元件的改进,一些功率较大、响应速度快、控制精度高、负载能力强的场合,电液控制在运动控制系统中占据着不可替代的地位。韩强强[5]解决了联合仿真的接口与实现问题,江玲玲等[6]应用AMESim 和Matlab 的联合仿真技术建立了阀控缸电液位置伺服系统的PID 控制模型,实现了联合仿真。在四锚定位系统中,电液控制系统是液压锚机的核心部分,电液控制系统按其结构可分为开环控制系统和闭环控制系统,本论文基于AMESim 液压仿真软件对锚机的闭环控制系统进行建模,利用Matlab/Simulink模块对液压锚机的控制系统进行设计,对传统的锚泊系统进行了改进,引入了电液控制系统来控制四锚机的锚链收放,充分实现了锚泊定位的闭环控制。
1 电液控制锚机的工作原理与仿真模型
1.1 探矿船电液控制的基本原理
探矿船的定位和移位是通过控制液压马达实现锚链的收放,进而达到探矿船位置调整的目的。本文采用的是闭环比例速度控制系统,其调速系统的原理图见图1。

图1 探矿船锚机电液控制系统原理图Fig.1 Schematic diagram of electro-hydraulic control system for anchor of exploration ship
该系统是在传统的开环控制系统的基础上,增加了速度反馈元件而构成的。其中比例控制元件是电液比例方向阀,工控机发出指令信号给比例放大器,比例放大器根据信号提供相应的电信号给电液比例方向阀的线圈,通过电信号的大小调节电液比例方向阀的滑阀开口量,电液比例方向阀输出压力油控制马达轴以相应的转速带动锚机旋转,从而实现锚链的收放。液压马达的转速经齿轮减速箱之后向锚机输出需要的扭矩,在锚机另一侧安装金属探测器检测锚机的转速,转矩与转速经传感器检测之后经A/D 转换,把信息传递到工控机,工控机把反馈信号与预设值进行比较得出的偏差信号由比例放大器放大后输出给比例电磁铁,从而控制比例方向阀的开口量,对液流的方向和流量进行控制,达到控制液压马达的转向和转速的目的。
1.2 液压锚机的AMESim 模型建立
通过对电液比例控制原理的介绍,可以在AMESim 软件中搭建锚机的液压仿真模型。不带反馈的锚泊系统模型见图2,整个四锚定位的液压比例控制系统分为四个液压回路,这里只对其中一支回路进行分析,其他支路的工况可以通过工控机采集的信号经过D/A 处理后,在阀控信息环节集中体现。

图2 不带反馈的锚泊系统模型Fig.2 Anchor system model without feedback
液压锚机的电液比例控制系统主要包括三个部分:①液压油供给部分;②信号处理部分;③液压马达扭矩输出部分(执行部分)。正常情况下,电机输出转矩带动液压泵13 向系统供油,溢流阀14 调节整个系统的油压,当系统出现故障而导致系统憋压时,安全阀阀芯顶开对系统进行泄压,对整个液压系统起过载保护作用。锚机的正反转是根据实际工况与事先导入工控机的施工图纸进行比对之后的误差决定的,实现锚机的正反转则由液压马达1 来控制,电液比例换向阀10 通过信号源15 传输的信号,控制换向阀的阀芯位置,从而实现液流方向与流量大小的控制。由于锚机在工作时载荷不确定,工况多变且恶劣,为提升锚泊定位的精度并达到调整速度稳定的要求,在锚机的液控系统中采用了双向平衡阀16。无论液压马达是正转还是反转,梭阀18 都处于工作状态,梭阀相当于两个单向阀组合而成的一个“或门”逻辑阀,主要实现对制动器20 的控制。而制动器其实就是一个带弹簧复位的单作用液压缸,当电液比例换向阀处于中位的时候,液压泵停止向油路供油,液压马达已经实现了精确定位,这时候锚机上刹车钢带将锚机刹车。
2 基于AMESim 的液压锚机系统的动态特性分析
电液比例换向阀主要通过电磁铁是否受到激励或者输入电流的极性[7]实现换向的。电液比例换向阀的参数设置见表1。电液比例换向阀的输入信号曲线见图3。

表1 电液比例换向阀的参数设置表Tab.1 Parameter setting of electro-hydraulic proportional directional valve
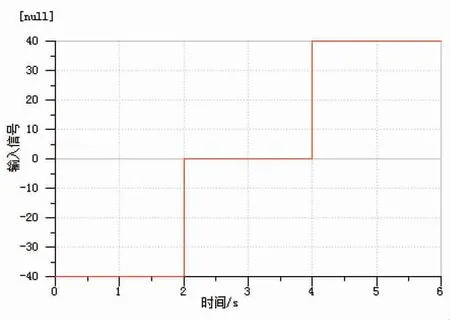
图3 电液比例换向阀输入信号曲线Fig.3 Input signal curve of electro-hydraulic proportional directional valve
电流比例换向阀的额定电流决定了滑阀的方向,令输入信号的电流值为Isig,额定电流为Ie。当Isig≥Ie时,换向阀左位工作,当-Isig≥Ie时,换向阀右位工作,当Isig∈(-Ie,Ie)时,滑阀的开度与Isig成线性关系。
在AMESim 的Parameter Mode 下设置好参数,然后在Simulation Mode 下对液压系统进行仿真,在Temporal Analysis Mode(时域模式)下,设置仿真时间为一个周期6 s,仿真的Print Interval 设置成0.01 s。可以看到,在0~2 s 内,电液比例换向阀电磁铁输入电流为-40 mA,换向阀右位工作,液压马达正转,在0.3 s 后速度达到稳定;在2~4 s 内,电磁铁失电换向阀处于中位,曲线在3 s 后才达到平稳,2~3 s 范围内马达转速波动比较大。4~6 s 内,电磁铁输入电流40 mA,电磁换向阀阀芯处于左位,超调量比较大。
身心素质主要表现在体质水平和心理品质两个方面。体质主要包括体能、身体基本活动能力、生理机能、体格和适应能力。体育教育提高学生体质水平的主要路径是通过提高学生的力量、耐力、运动速度等体能素质,增强学生内脏器官特别是心血管系统和呼吸系统的功能。在某种意义上,学生的体质水平越高,他对环境的适应能力和对疾病的抵抗力就越强。随着人们生活节奏的日益加快和生活方式的不断改变,越来越多的人因运动量不足导致体质趋弱,大学生也不例外。为此,高职院校体育教育应该通过科学、有效的运动方式引导学生积极参与体育运动,提高他们适应内外环境的能力。
由图4 可以看出,三位四通阀在换向的瞬间,系统出现的不稳定现象是类似的,因此只需对系统的单位阶跃信号作研究就能了解系统的特性,在下面的仿真过程中,如无特殊交代,输入信号均为单位阶跃响应,这样可以在不影响研究系统特性的前提下节约仿真时间。
由图5 可以看出,在单位阶跃信号下,锚机的转速出现较大的超调量,系统稳定性差。

图4 电液控制锚机时间-转速图Fig.4 time speed diagram of electro-hydraulic control windlass
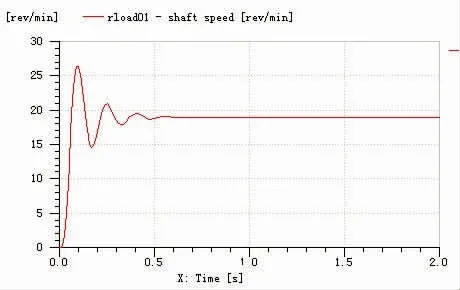
图5 在单位阶跃响应下的锚机时间-转速图Fig.5 Time speed diagram of windlass under unit step response
3 四通阀控液压马达的数学模型
四通阀控液压马达是一种比较常见的液压执行元件,它是由四通阀与惯性负载、任意外加负载力矩、黏性摩擦负载和带有弹簧负载的液压马达组成的。液压马达和负载的力矩平衡方程、液压马达流量的连续性方程和四通阀的流量连续性方程可表示为方程式:
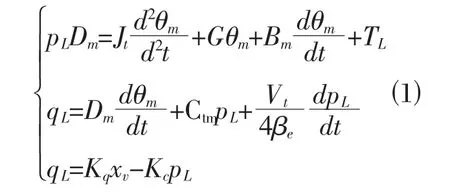
式⑴中:pL为阀的负载控制压力;Dm为液压马达的弧度排量;θm为液压马达的转角位移;Bm为折算到马达轴上的粘性摩擦系数;Jt为折算到马达轴上的负载总转动惯量;G 为折算到马达轴上的负载的扭转弹簧刚度;βe为系统的有效容积弹性模量;TL为折算到马达轴上的任意外加负载力矩;Ctm为液压马达的总泄漏系数,Ctm=Cim+Cem,其中Cim,Cem分别为液压马达的内、外泄漏系数;Vt为液压马达进、回油腔的总容积,Vt=V1+V2,其中V1,V2分别为液压马达进、回油腔的容积(包括马达的进/回油腔、阀腔容积和连接管道);Kq为阀的流量增益;Ke为阀的流量-压力系数;xv为阀芯控制位移。
对公式⑴进行拉氏变换,并消去中间变量pL和qL,即可得到阀控液压马达在阀芯位移xv与外负载力矩TL同时输入时,马达的总输出角位移对阀芯控制位移的传递函数:

液压马达-负载的传递函数为:

电液比例换向阀的传递函数为:

式中,ωh为液压固有频率,ζh为液压阻尼比。
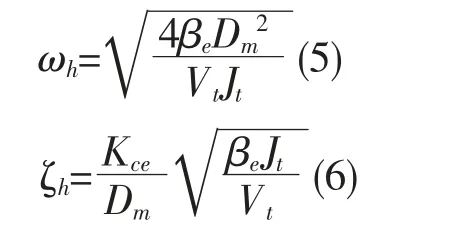
式(6)中:Kce=Kc+Ctm为阀控液压马达总流量-压力系数。
由传递函数(2)、(3)可知,影响动力元件频率特性的主要性能参数有3 个,即速度的放大系数Kq/Dm,液压的固有频率ωh,以及液压阻尼比ζh。其中Kq/Dm的变化将使幅频特性曲线上下位置发生变化,使得穿越频率ωc发生变化,但不影响相频特性。ωh的变化将会影响谐振峰值所对应的频率位置,ζh的变化将会导致谐振峰值不同和相频特性曲线形状的变化。Kq/Dm增大会提高系统的开环增益,穿越频率提高,能提高系统的响应速度和精度,但会降低系统的稳定裕量,使得系统稳定性变差。为保证执行机构良好的控制性能,通常控制负载压力pL≤2ps/3。固有频率ωh则会影响系统的稳定性,固有频率ωh增大,系统的稳定性提高。而液压阻尼比ζh对比例控制系统的稳定性和稳定裕量有直接的影响,为了达到系统满意的性能要求,可以提高液压阻尼比。为了实现系统性能的最佳效果,要匹配好Kq/Dm、ωc、ζh三者之间数量关系,利用AMESim和Simulink 进行联合仿真,既发挥AMESim 在流体方面的强大优势,又能借助Matlab/Simulink 强大的数据处理能力[8]。
4 AMESim 与Simulink 联合仿真的实现
由于不带反馈的锚泊系统在换向阀换向过程中对系统有明显冲击,导致马达输出转速的稳定性比较差,通过带反馈的闭环控制后,根据上述传递函数方程,可以在AMESim 中对原有模型进行改进与修正,马达的性能得到明显改善,改进后的仿真模型见图6。

图6 AMESim/Simulink 联合仿真的系统模型Fig.6 AMESim/Simulink joint simulation system model
在AMESim/Simulink 的联合仿真系统中,加入了一个蓄能器,蓄能器的作用主要为辅助动力源,对系统保压或作紧急动力源、吸收系统脉动、缓和液压冲击[9]。该仿真中主要起到对系统保压以及吸收系统压力冲击作用。在液压马达的输出端加入一个转速传感器,把采集到的转速作为输出量,对电液比例换向阀的阀芯位置进行闭环控制。
在AMESim 的Sketch Mode(草图模式)下创建Interface Block,该接口模块可与Simulink 中SFunction 函数进行接口对接。S-Function 是Matlab/Simulink 模块的计算机语言,通过S-Function 用户可以将所需的模块放入Simulink 中,从而实现用户自定义的算法或者利用操作系统、硬件设备进行交互[10]。将马达的转速检测后进行转换反馈到换向阀,整个模型在Matlab/Simulink 环境下进行仿真,具体模型见图7。
在Simulink 模型中,设置参数kp=40,ki=0.05,kd=0.3,系统输入一个梯形波信号,最终得到的锚机时间-转速曲线见图8。在换向阀换向的过程中振荡明显缓解,超调量也控制在合理范围之内,满足探矿船在一定条件下的定位要求。
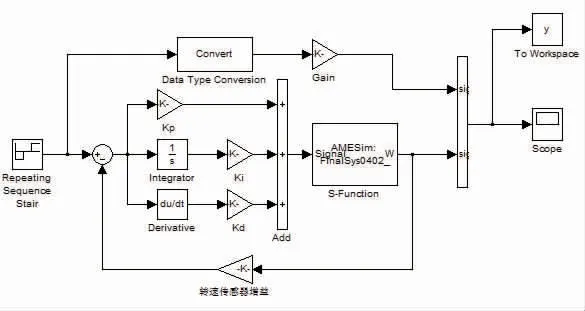
图7 Matlab/Simulink 环境下锚机定位系统仿真模型Fig.7 Simulation model of anchor positioning system in Matlab/ Simulink environment

图8 锚机仿真前后时间-转速曲线Fig.8 Time speed curve of windlass before and after simulation
5 结论
通过AMESim 软件完成了电液控制液压锚机的系统搭建,借助AMESim 软件强大的机械/液压建模与仿真能力与Matlab/Simulink 强大的数值计算能力,充分发挥各自的优势,设计出了PID 闭环控制系统。仿真的对比结果表明,电液控制的锚泊定位系统超调量降低,振荡明显减弱,符合系统稳定性要求。通过对探矿船锚机的电液比例控制系统的AMESim/Simulink 联合仿真研究,最终的仿真结果实现了四锚定位液压控制系统的稳定性、快速性与准确性的最佳匹配,表明探矿船四锚定位电液控制系统的方案是可行的。
