双机空空导弹协同攻击区仿真研究*
2019-06-15徐国训梁晓龙张佳强王维佳
徐国训,梁晓龙,张佳强,王维佳
(空军工程大学空管领航学院,西安 710051)
0 引言
航空集群是由一定数量的单功能和多功能有人或无人航空飞行器共同组成,以交感网络为基础,具有整体能力涌现特点的空中移动系统[1-2]。航空集群双机空空导弹协同攻击区,是指集群双机携载的空空导弹在协同制导模式下形成的空间整体可杀伤区域。
准确计算空空导弹攻击区并指导飞行员选择合理的机动策略达成有利的空间占位,一直是空空导弹应用研究的关键问题。当前,在国内外公开文献资料中关于空空导弹攻击区的研究较多也较深入,张安、李立坤、Shneydor、李相民等人系统地介绍了传统单发空空导弹攻击区的基本概念、计算方法及其约束条件,文献[3-4]考虑了多目标攻击的问题,文献[5-7]研究了协同制导。但总结起来,攻击区计算始终是对单机空空导弹攻击区进行研究,由于受机载火控系统限制,单架作战飞机难以对空中目标形成连续的杀伤范围,易导致攻击盲区的出现。截止目前,对双机平台协同攻击制导研究的文献几乎没有。因此,双机空空导弹协同攻击区的研究尤为必要。
本文在航空集群作战框架下,提出双机协同攻击区计算方法,与以往的空空导弹研究以单机平台为主不同之处,在于主要研究了协同制导条件下双机在不同空间占位下协同攻击区的变化情况。
1 双机空空导弹协同攻击区原理
1.1 单发空空导弹攻击区
空空导弹攻击区是指对应于一定的目标毁伤概率,在载机周围空间允许发射空空导弹的空间范围[8]。传统的单发空空导弹攻击区主要是以攻击机为中心,由导弹可以攻击到的远近边界和侧边界围成的可攻击区域。文献[9]给出了传统单发空空导弹攻击区模型的解算方法,其在极坐标系下的仿真结果如图1所示。
1.2 双机空空导弹协同攻击区
图1所示在传统单机发射/制导攻击模式下的单发空空导弹攻击区由于受发射/制导平台火控系统性能的制约,空空导弹的可用发射区较小。
双机空空导弹协同攻击区是集群双机通过空间占位和协同制导将双机机载空空导弹孤立的攻击区融合为连通一体的或满足特定战术战法的攻击区,双机协同攻击区不等于两架单机攻击区简单的几何叠加,而是根据双机不同的空间占位选择合理的制导/发射方式,实现火力协同的同时能有效拒止敌方从集群内各飞机的攻击盲区实施攻击,从而有效扩大集群火力杀伤范围。
研究双机协同攻击区问题的主要难点在于集群双机在不同空间占位情况下采用的协同制导方法,以及确定双机不同空间占位对协同攻击区大小影响的评判标准。
2 双机空空导弹协同攻击区模型
为研究方便,将导弹和目标看作是运动的质点,假定集群双机和目标机在同一平面内运动(该平面称为攻击平面),空战中集群双机与目标机的相对位置关系可用图2说明。其中,F1、F2分别为集群 1 号机、2 号机,T 为目标机,φ1、φ2分别为目标相对方位角,θ1、θ2为我机相对方位角,q1、q2为目标进入角,D为双机距离,β为集群2号机与1号机的相对方位角,v1、v2为集群双机速度,vT为目标机速度。N为正北方向,这里令所有角度顺时针方向为正,且取值范围为[0,π]。
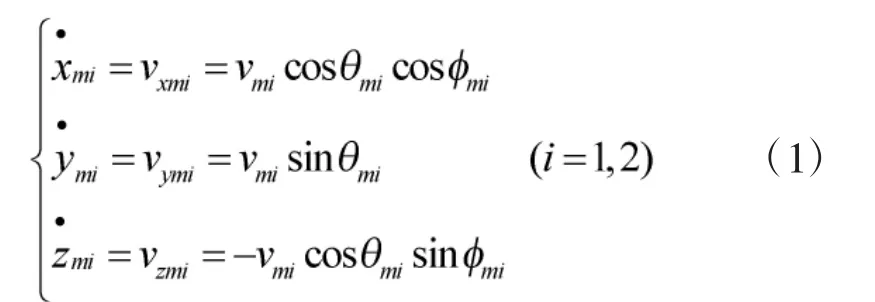
2.1 双机空空导弹运动建模
双机导弹在惯性坐标系下的运动学方程为:
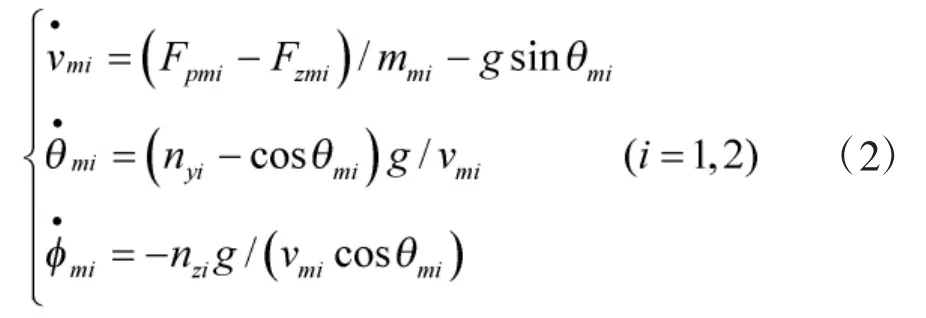
导弹三自由度动力学方程为:
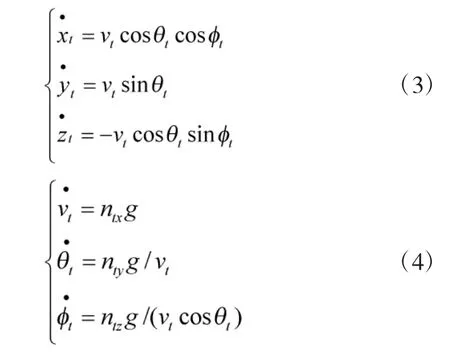
2.2 目标机运动建模
目标机在惯性坐标系下的运动学方程为:
2.3 导引头模型
本文选用比例导引法,即假定导弹速度矢量的转动角速度和目标线的转动角速度成比例。其导引关系式为:

即:

其中,K为比例系数,qi为双机目标线方位角(简称视角),σi为导弹速度矢量与目标线之间的夹角。
2.4 双机运动建模
集群双机的运动方程为:
2.5 相对运动方程
2.6 攻击区计算约束条件
2.6.1 弹道仿真约束条件
1)导弹飞行时间超过最大飞行时间。
2)导弹动态视场角超过导弹速度前置角。
3)导弹飞行速度小于最小飞行速度。
5)引信解锁时间限制。当弹目接近时剩余时间小于引信解锁时间时易脱靶。
6)导弹战斗部有效起爆区限制,此时的视线角不大于 90°。
2.6.2 集群双机协同约束条件
文献[5]研究了双机协同制导过程中载机和制导机约束条件,主要有:
1)载机火控雷达的探测距离和探测角度限制。
2)协同制导的作战飞机之间的距离约束,为保证数据有效传递,集群双机之间的距离不能大于最大通信距离,即:

3)导弹应处于他机的制导区域内且他机的位置应该落在导弹指令接收天线的角度范围之内,即制导区域的角度φg和导弹指令接收天线接收范围角度φr的限制。即:

式(11)中,qmi为导弹与制导机的视线角,分别为导弹和双机的弹道偏角。
3 攻击区边界快速搜索算法
为快速求解攻击区发射包络,须对双机周围的目标点进行连续搜索,并通过弹道仿真得到双机导弹能攻击到的最远点。一维搜索中黄金分割法同其他方法相比,不需事先知道计算次数且收敛速率较快,满足对算法实时性的需要。故采用黄金分割法对攻击区远近包络分别进行搜索,以计算双机空空导弹协同攻击区远距离边界为例。
1)首先,将目标和导弹参数初始化,确定集群双机运动状态和初始搜索方位角,设置最大初始搜索范围。
2)分别判断集群双机是否满足协同约束,同时确定载机发射/他机制导方式或单机发射/制导方式。
3)分别计算双机黄金分割点Rg1、Rg2,利用黄金分割法进行循环计算得出双机攻击距离最远点,取两者最大值并记录,再增加一个方位角仿真步长直至循环完毕。
4)最后记录所有远界点并将其连接形成集群双机远界发射包络。算法具体流程如图3所示。
近界搜索与远界搜索相似,只是在迭代中若导弹击中目标,则令Rf=Rg,否则令Rn=Rg;且选取着=80。
4 仿真分析
图3 攻击区边界快速搜索算法流程图
为直观说明双机空空导弹协同攻击区与传统单发空空导弹攻击区的区别,验证模型和算法的有效性,本文对此进行了仿真验证。
图2所示的集群双机空战模型是集群多机空战的基本单位,文中简化了协同制导过程中导弹制导精度和制导交接班的影响。仿真初始参数设定如下:
2)目标机和集群双机对头飞行,集群双机并行飞行,集群双机与目标机保持匀速飞行且速度均为300 m/s;
3)设机载雷达跟踪截获区域的角度φradar=60°,集群双机在协同制导过程中制导机的有效制导角度φgi=120°,导弹尾部指令接收天线接收范围角度φri=120°。
4)不考虑随机风场等外部条件的干扰。
由攻击区计算约束条件可知,影响协同攻击区覆盖范围的因素主要是集群双机的相对方位角β和双机距离D,因此,分别对这两种因素进行仿真分析。
4.1 双机距离对协同攻击区影响
设置集群2号机与1号机的相对位置角β为π/2;对集群双机距离D在15 km~30 km范围内进行仿真,仿真结果如图4(a)~图4(e)所示。
图4 距离D对协同攻击区范围影响
由图4仿真结果可得:与单发空空导弹攻击区相比,双机空空导弹群攻击区的攻击范围明显增大;且当双机距离D≤30 km时,攻击区范围随双机距离的增大而增大,可以形成有效的闭合杀伤区域;随着双机距离D继续增大,协同攻击区内侧收缩导致整体攻击区范围变小,这主要是由于当双机距离过大时,导弹逐渐超出协同制导机有效制导范围,双机火力协同能力减弱,又逐渐变成2架单机的孤立作战行为。
为区别双机协同攻击区与两架单机攻击区的几何叠加,将两架单机攻击区的几何叠加与双机协同攻击区进行仿真对比,结果如图5所示。
图5 2架单机攻击区与协同攻击区对比
由图5可得双机协同攻击区范围明显大于2架单机攻击区的几何叠加范围,具体体现在攻击区内侧区域增大明显。
4.2 双机相对方位对协同攻击区影响
图6 相对方位角β对协同攻击区范围影响
设集群双机距离为20 km,集群2号机与1号机的相对方位角β取值范围为[0,π],仿真得到协同攻击区如图6(a)~(e)所示。
由图6(a)~(e)的仿真结果可得:集群双机距离一定时,协同攻击区范围随β取值的不同变化较为明显,当β取值范围为[0,π/2]时,随着β值的增大协同攻击区面积呈增大趋势;且当β=π/2时协同攻击区范围最大,此时,双机火力协同效果最佳;当β继续增大时,协同攻击区范围又逐渐变小,即双机呈前后交叉方位时,由于受制导机有效制导角度φg和导弹尾部指令接受天线接收范围角度φr的约束,双机协同效果不佳且部分攻击区前后叠加,从而影响整体有效攻击范围的增大。
为使图4和图6的仿真结果更直观,以攻击区覆盖面积为度量标准,得到双机不同相对方位角下攻击区面积Sg随距离变化线,如图7所示。
图7 攻击区面积Sg随β和D的变化图
由图7的数值统计结果可以得出:双机在距离D为30 km且β为π/2时双机协同攻击区面积达到最大;相同条件下,相比于传统的单发空空导弹攻击区,双机空空导弹协同攻击区的攻击区范围增大了1.6~2.2倍,且双机在不同的空间占位下攻击区纵向攻击距离Ly和横向的攻击距离Lx都有所扩大,具体数据对比如表1所示,仿真结果验证了文中模型和算法的有效性。
表1 传统单机模式与本文模式对比结果
5 结论
本文主要对集群双机编队空空导弹协同攻击区进行了研究,针对传统单发空空导弹攻击区范围较小且缺乏协同的问题,建立双机编队空空导弹协同攻击区模型,提出基于黄金分割法的攻击区快速搜索算法,对不同空间位置下的双机协同攻击区进行了仿真分析,主要得到如下结论:
1)在协同制导条件下双机协同攻击区范围比传统的单发空空导弹攻击区范围明显增大,且不等同于2架单机攻击区的几何叠加。
2)集群双机协同攻击区的范围大小随着双机空间相对位置的变化而改变,即双机协同攻击区范围主要受双机距离D和双机相对方位角β的影响。根据仿真分析结果可得出:在本文仿真条件下,双机在距离D=30 km且相对方位角β=π/2时协同效果最佳,协同攻击区覆盖范围最大;此时双机达到协同攻击时的最佳空间构型。