深山峡谷中GPS平面控制网快速复测技术的研讨
2019-06-12杨元林崔同菊
杨元林,崔同菊
(中国水利水电第十四工程局有限公司, 云南 昆明 650041)
0 前 言
GPS作为最新型的定位技术正在广泛地应用于军事、科学、工程及生活中, GPS使很多事情变得更加精准,工作效率也大大提高。随着科技的发展,GPS技术逐步用于复杂环境的工程测量中。目前,我国西部许多建设的高速公路,地处深山峡谷,高程起伏大,高速公路线型复杂,并且任务重、工期紧,采用GPS快速测量技术,相比传统的测量方法,节约了大量的人力、物力。GPS控制测量方便,受地形地貌影响小,观测解算一体化,工作效率高,已成为目前工程施工测量的主要方法。本文通过对GPS测量从外业观测到内业解算的全过程研究,总结出了一套快速、可靠的测量方法。
1 工程概述
本工程属于宜宾至昭通高速公路云南段的一期项目,路线起于K144+910 m,止于K237+600 m,路线全长92.72 km,设计速度80 km/h,设计标准为双向四车道,路基宽24.5 m。起点为彝良县海子乡,终点为昭通市北闸镇,设置北闸立交与麻昭高速公路衔接。项目建成后将成为通往云南省昆明市、贵州省贵阳市、四川省泸州市、重庆市四省市的省际快速通道。接G85渝昆高速通往云南省会昆明;接在建的昭泸高速(彝良至镇雄段)、G56杭瑞高速通往贵州省会贵阳;接G93成渝高速通往重庆。远期宜昭高速(彝良至宜宾段)建成后,可接G85渝昆、G76夏蓉高速前往成都。
2 控制点平面坐标
采用“宜昭高速抵偿坐标系”,类似“国家54坐标系”。
本工程路线在测区内总体呈东北~西南走向,地理经度范围103°45′~104°20′,地理纬度范围27°25′~27°38′,沿线地形起伏较大为山岭重丘区地形。测区高程约在870~2 200 m之间。为了保证全线成果的统一性,满足规范和线路设计要求,减少接边误差,根据高斯投影理论以及本条线路的实际情况,须保证本测区投影长度变形值小于2.5 cm/km及桥遂等大型构造物投影长度变形值小于1.0 cm/km,以抵消投影变形。抵偿坐标系如表1所示。

表1 宜昭高速抵偿坐标系汇总
3 设计方案
3.1 选点埋石
(1)通过现场踏勘,原有控制点被破坏的,若施工则需重新埋点,由于线路调整,部分距施工区域较远的控制点可以舍弃,点密度不满足施工需求的地方需要加密控制点。
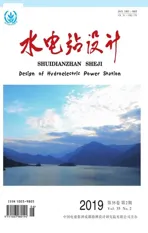
(2)埋石要求如下:埋设的控制点标石,其规格为150 mm×300 mm×600 mm的水泥混凝土桩,桩中埋设一根长300 mm的Φ12钢筋以便固定,并在桩顶露出5 mm且做“十”字丝刻划。埋设时,基坑用水泥砂浆、石块回填夯实,在上部用水泥砂浆“戴帽”固结,如图1所示。点位埋设后及时做好点之记记录。
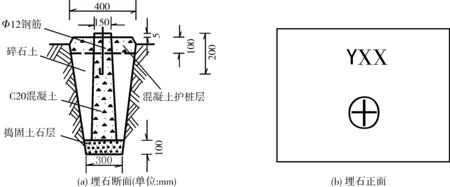
图1 埋石断面及正面示意
(3)控制点沿设计路线两侧布设,点距离设计路线中线50~300 m;控制点间尽量保持前后通视,困难地区至少保证两点相互通视。
(4)控制点应埋设在地质条件稳定,易于长期保存的地方,同时还应该兼顾施测方便。
(5)控制点周围环境应该满足规范对GPS外业观测和水准观测的要求;远离强震、强磁场、强反射区、高压电线等不良环境。
(6)一般情况下,平面、高程控制点共用,在施测水准困难的地方,可以适当增设单独的高程控制点。
3.2 平面控制测量
3.2.1 GPS控制测量技术要求
GPS静态测量基本技术要求见表2。

表2 GPS静态测量基本技术要求
平面控制网最弱点相对于起算点的点位中误差不得超过±5.0 cm,相邻点相对于起算点的点位中误差不得大于±3.0 cm,三等GPS平面控制网最弱相邻点边长相对中误差不得大于1/70 000。四等GPS平面控制网最弱相邻点边长相对中误差不得大于1/35 000。
3.2.2 GPS控制测量方法
(1)本次测量采用14台中海达V90双频接收机按边连式推进方式构网进行野外数据采集,接收机标称精度为±(5 mm+1 ppm·D),D为观测基线长度,单位为km。
(2)GPS平面控制采用四等、独立三等网,网形为边连方式。
3.2.3 GPS控制测量作业要求
(1)观测人员应严格遵守观测计划和调度命令,按规定的时间进行同步观测作业,测站之间密切配合。
(2)到达点位以后,作业人员均应按要求架设好接收机天线,做到精确对中、严格整平,并做好仪器、天线、电源的正确连接。
(3)接收机开始记录数据后,观测员要经常查看测站信息及其变化情况,做到发现异常情况及时通报给现场调度员。
(4)观测人员应操作细心,在观测期间,防止接收设备震动、移动和其它物品碰动天线或阻挡信号。
(5)观测时段结束后应认真进行检查,当测量记录项目齐全,并符合要求后报告调度员才可迁站。
(6)天线高量取两次,高差值小于3 mm时取平均值,取位到1 mm。
(7)雨雾天气观测时,需用塑料袋包好主机,回到驻地后擦拭并晾干。
3.2.4 GPS数据处理技术要求
外业数据采集完成后,立即进行基线向量的解算,重复基线的验算,然后进行同步环、异步环、PDOP值、有效卫星个数的检验工作,当以上工作各项限差满足规定要求后,采用中海达HGO软件进行基线解算,基线解算完毕并检查合格后,将基线向量输出,分别采用HGO/COSA GPS进行平差计算。数据处理应满足以下要求:
(1)同一时段观测值基线处理中,数据采用率不宜低于80%。
(3)同步环各坐标分量及全长闭合差均满足:
式中,n为同步环的边数;σ为相邻点间弦长精度,根据相应等级精度要求取环平均边长计算。
(4)异步环的坐标分量及全长闭合差均满足:
式中,n为独立环中的边数;σ为相邻点间弦长精度,根据相应等级精度要求计算;V为环闭合差。
无论采用单基线模式或多基线模式解算基线,都应在整个GPS网中选取一组完全的独立基线构成独立观测环,其异步环的坐标分量闭合差和全长闭合差应符合规定。
3.2.5 GPS网平差技术要求
GPS网的平差计算,按基线向量网的三维无约束平差,三维基线向量网向二维基线向量网的约束平差步骤进行。
(1)三维基线向量网的无约束平差在WGS-84坐标系中进行。
(2)二维约束平差在椭球面上进行,进行二维约束平差以前,首先应对首级控制点的相容性进行检查,采用相容性较好的控制点作为二维约束平差的起算点。
(3)二维约束平差计算后的成果作为目标坐标系,可直接用于施工测量。
(4)独立隧道GPS平面控制网,应采用观测质量较好的一个点作为起算点,以这个点和位于隧道另外一端的、处于隧道轴线方向一个点的方位角作为起算方位角进行平差计算。当独立控制网的中检核点与路线控制测量中横坐标差异较大时,应对构造物平面控制网进行旋转,最终成果中检核点在两个网中的坐标差值不应大于40 mm。
4 测量方案
4.1 GPS控制测量作业流程(见图2)
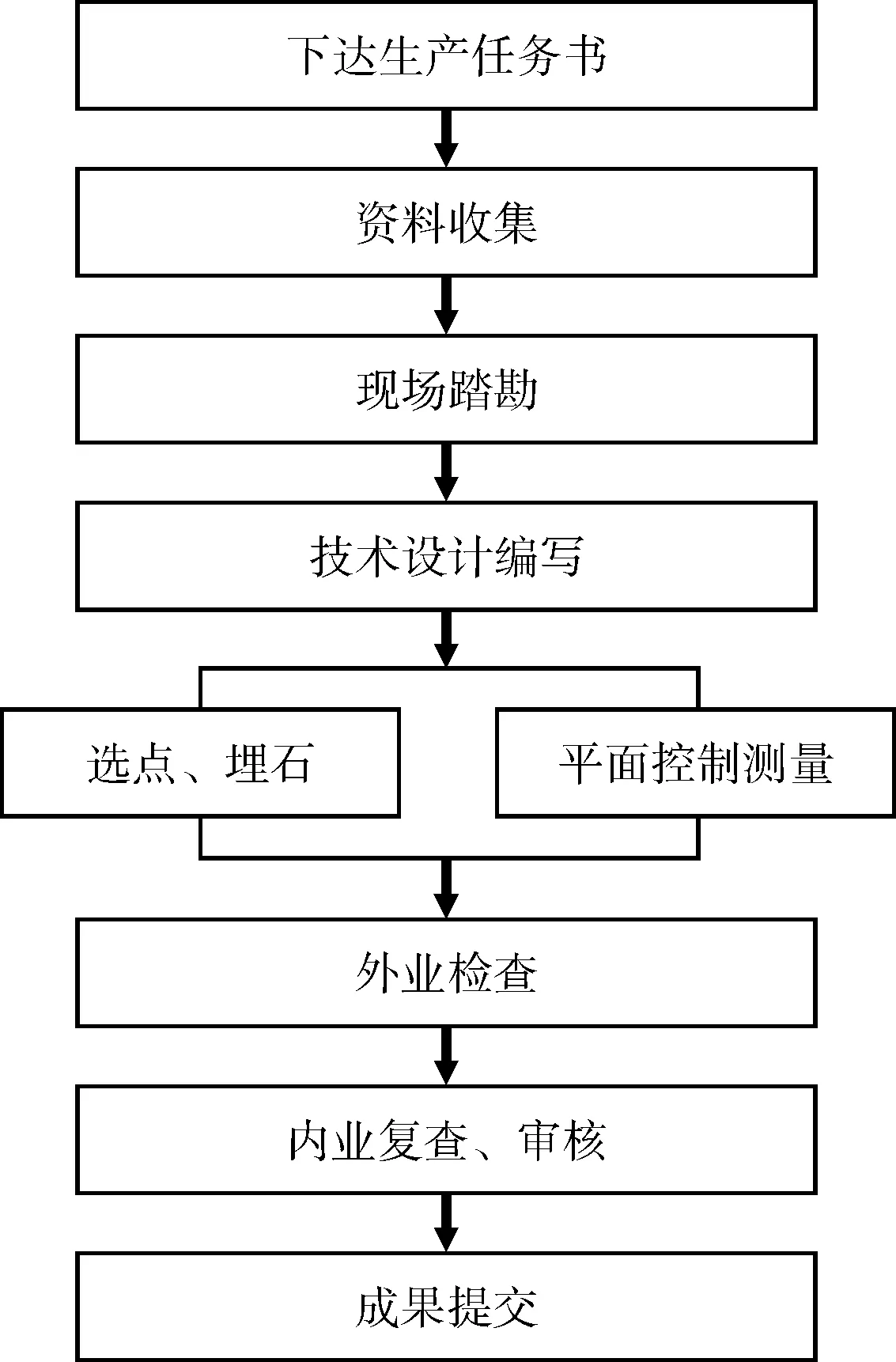
图2 GPS控制测量作业流程示意
4.2 野外数据采集
4.2.1 GPS接收机的使用
采用14台中海达V90双频接收机按边连式推进方式构网进行野外数据采集,接收机标称精度为±(5 mm+1 ppm·D),D为观测基线长度,单位为:km。
4.2.2 天线安置与对中精度
天线架设高于地面1 m以上,严格整平天线,使用经检校后,对中精度大于1 mm的光学对中器对中。
4.2.3 天线高的测量
天线高量至毫米,天线高测量在观测前后按斜高方式各量测一次,较差都小于3 mm,然后取用平均值记录在手簿上,最后用该值作为软件平差采用的天线高。观测质量控制见表3。
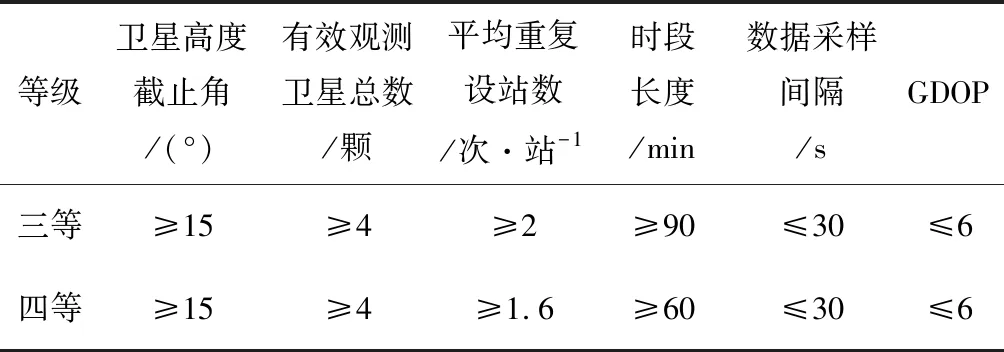
表3 观测质量控制
4.3 GPS网的数据处理
GPS平面控制网数据处理流程见图3。
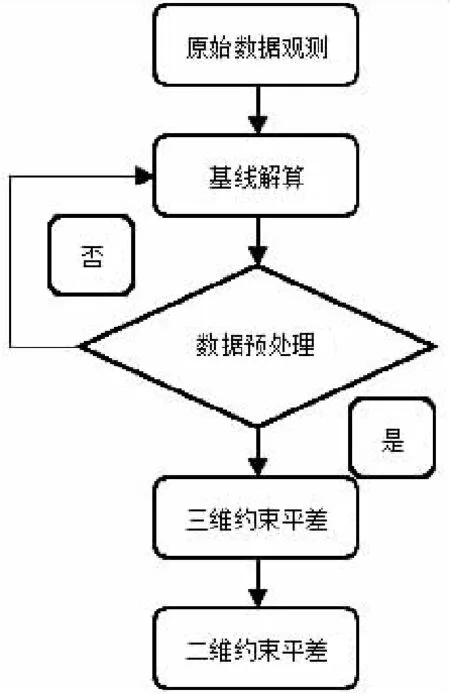
图3 GPS平面控制网数据处理流程示意
4.3.1 数据处理软件的选用
数据传输采用中海达HGO软件解算基线,共解算出664条合格基线,同一时段观测值的数据剔除率0.9%。利用HGO进行网平差,并统计重复基线数、同步环和异步环数。
4.3.2 复测基线检查
共有复测基线15条,计算后最大相对误差为14 ppm,见表4。

表4 重复基线观测值
经检查,最大复测基线长度较差满足《公路勘测规范》(JTG C10-2007) 4.1.5-1的要求。
4.3.3 环闭合差检查
由664条合格基线共组成1 643个同步环,计算后平面最大同步环闭合差相对误差为7.07 ppm。经检查,最大同步时段中同步环的坐标闭合差满足《公路勘测规范》(JTG C10-2007)中4.1.5-2的要求。
由此可以看出GPS野外数据采集质量良好,观测时段长度合理,基线解算精度情况优良,可以进行下一步网平差。
4.3.4 GPS网基线向量平差
GPS网空间向量网在WGS-84坐标系下的三维无约束平差, GPS空间向量网的无约束平差,进行无(最小)约束平差。平差结束后,四等网无约束平相对误差最大值为1/67 645,三等网无约束平相对误差最大值为1/45 510。三等网主要原因为峡谷山区,GPS接收机静态数据质量差。
经检查,无约束平差基线改正量绝对值最大值均满足《公路勘测规范》(JTG C10-2007)4.1.5-4的要求。三维无约束平差后的点位误差及最弱边相对中误差最大值见表5。
从各项精度指标可看出:三维无约束平差后的点位误差及最弱边相对中误差最大值均达到《公路勘测规范》(JTG C10-2007)、《技术设计书》的要求,三、四等GPS网在WGS-84坐标系下的三维无约束平差后精度优良,说明三、四等GPS网布设合理,基线组网方式合理,数据采集质量可靠,该网内符合精度较高。
GPS网空间向量网在各坐标系成果进行二维约束平差,平差结束后,四等网二维约束平相对误差最大值为1/55 499,三等网二维约束平相对误差最大值为1/127 161。二维约束平差后的点位误差及最弱边相对中误差最大值见表6。

表5 三维无约束平差后的点位误差及最弱边相对中误差最大值
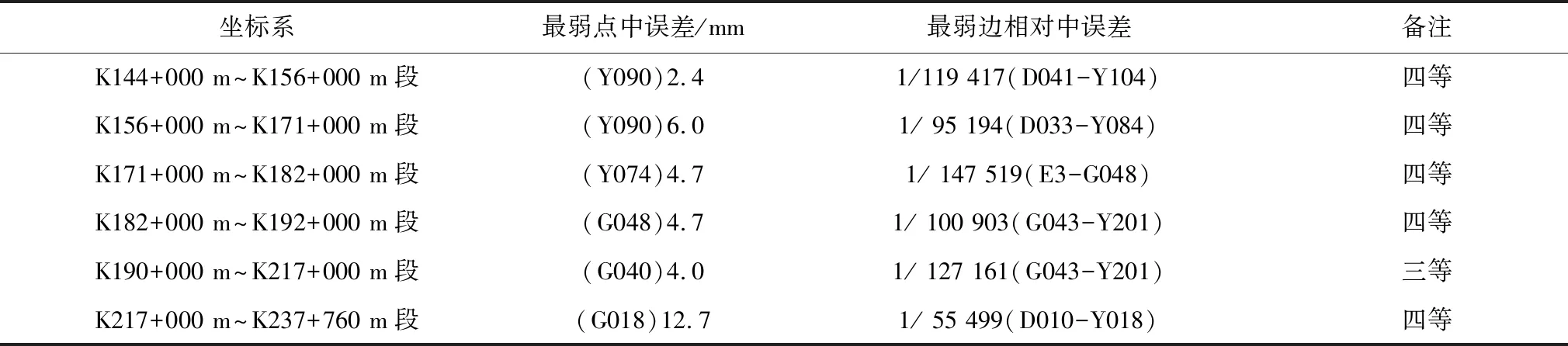
表6 二维约束平差后的点位误差及最弱边相对中误差最大值
经检查,点位误差均能达到《公路勘测规范》(JTG C10-2007)、《技术设计书》要求,从各项精度指标可看出三、四等GPS网精度较好,达到三、四等精度要求。
5 结 语
高速公路施工由于地形复杂、高差大、受气候条件影响等原因,长期以来,使用常规的测量方法布设高精度的测量控制网,主要依赖于高精度的测距仪、经纬仪或者全站仪,常规的边、角控制网测量要求各控制点间必须通视,给网形的布设带来了很大的限制。该方法工作量大,作业时间较长,给常规测量工作带来了一定的困难。本文论述的在宜昭高速一期项目中采用GPS控制测量技术,仅用1周的时间就完成了任务,大大节省了人力、物力,极大程度地提高了工作效率,显示出 GPS技术相对于常规测量方式有着不可比拟的优越性。